一种桥梁基础设施激光扫描与倾斜实景点云数据拼接方法
1.本发明公开了一种桥梁基础设施激光扫描与倾斜实景点云数据拼接方法,属于摄影测量技术领域。
背景技术:
2.随着我国社会经济的飞速发展,基础设施建设也越来越广泛。在实景三维中国建设的大背景下,对于三维实景模型的需求达到前所未有的高度。桥梁作为交通基础设施的重要组成部分,因其结构复杂,单一的数据获取方式难以实现场景全覆盖,影响后续三维实景模型构建的完整性。因此,开展多源点云数据融合技术方法研究具有重要的意义和应用价值。
3.桥梁激光扫描与倾斜实景点云融合的本质就是通过旋转、平移操作将位于不同空间位置处的激光扫描点云和倾斜实景点云转换到同一位置。现有方法多采用icp算法进行配准,icp算法实现的基本思路是:对于激光扫描点云中的每一个点,在倾斜实景点云中找到与其欧式距离最近的点,组成匹配点集;根据匹配点集采用svd分解算法求解旋转、平移矩阵,迭代运算直到所有匹配点对之间的欧式距离平方之和最小。由于道路场景下,桥梁基础设施结构复杂、数据量大直接导致基于点对点的配准方法效率不高;并且不同平台采集的点云数据在扫描精度和密度方面差异较大,不存在严格意义上的同名点对,配准误差较大。
技术实现要素:
4.本发明公开了一种桥梁基础设施激光扫描与倾斜实景点云数据拼接方法,以解决现有技术中,基于点对点的配准方法效率不高、配准误差较大的问题。
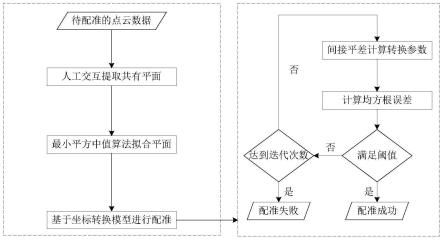
5.一种桥梁基础设施激光扫描与倾斜实景点云数据拼接方法,包括:
6.s1.多分区最小二乘平面拟合去噪;
7.s1.1.人工交互提取共有平面;
8.s1.2.多分区最小二乘平面拟合;
9.s2.对删除离群点后的所有平面点云进行最小中值平方法拟合平面,获取平面模型系数;
10.s3.基于同名平面点云的平面模型系数,利用间接平差法计算激光扫描点云与倾斜实景点云数据之间的转换参数,根据转换参数实现激光扫描点云与倾斜实景扫描点云之间的高精度融合;
11.s4.以平面到平面的距离的均方根误差和迭代次数作为约束条件进行迭代运算,完成点云数据拼接。
12.优选地,所述s1包括:在每一个平面点云数据中进行空间多分区的最小二乘平面拟合,对离散点到分区拟合平面的距离进行累计与统计分析,将远离拟合平面的点作为离群点删除;
13.通过软件显示出的点云数据,将激光扫描点云和倾斜实景点云数据中同一平面特征目标提取出来。
14.优选地,所述s1.2包括:
15.对于点云数据中的任意一点pi(xi,yi,zi),以pi为中心,r为半径进行球邻域搜索,如果该球形邻域内pi的近邻点个数小于3,则将pi点标记为离群点删除;如果近邻点个数大于3,则将pi其邻域内的点构建协方差矩阵m3×3:式中,m是点pi的临近点个数,m》3;是pi及其m个临近点的三维质心当i=0时表示pi点本身;
16.求解该协方差最小特征值对应的归一化特征向量即为局部平面的单位法向量,进而可得pi到局部平面的距离di为:
17.遍历计算每个点到局部平面距离的均值μ:
18.标准差σ:
19.当某一点pi到局部平面的距离在(μ-σ,μ+σ)范围内时保留该点,不在该范围则定义为离群点删除。
20.优选地,所述s2包括:
21.s3.1.随机选取平面内三点,计算模型参数,从平面点云中随机选取3个点,通过这3个点求解平面方程;假设选取的3个点为p1(x1,y1,z1),p2(x2,y2,z2),p3(x3,y3,z3),可得:
[0022][0023]
平面的单位法向量n为:
[0024]
已知平面的单位法向量和平面上的一点p1,可求得平面方程的系数;
[0025]
s3.2.计算各点到s2.1中所得到的平面的距离dis,并统计距离的平方中值ω,迭代计算k次;
[0026]
s3.3.选取k次迭代中ω的最小值所对应的拟合平面为最佳拟合平面,并根据式(1)、式(2)计算出每个数据对应的权值,通过权值自适应剔除异常点;
[0027]
式中,σ为稳健标准差;n为点的个数;ri表示第i个点与拟合平面之间的距离;med表示距离的中值;
[0028]
式中,wi表示第i个点的权重,权重为0则认为是异常点;
[0029]
s3.4.在剔除异常点之后的点集中,计算每个点到最佳拟合平面的距离,将距离小于给定阈值的点作为内点;
[0030]
s3.5.对内点采用最小二乘法重新计算平面模型的参数。
[0031]
优选地,所述s3包括:
[0032]
坐标转换模型的获取,基于同名平面点云的平面模型系数,构建间接平差模型,计算激光扫描点云与倾斜实景扫描点云之间的平移向量;
[0033]
设同一平面在坐标系o
1-x1y1z1中表示为p(a1,b1,c1,d1),在坐标系o
2-x2y2z2中表示为q(a2,b2,c2,d2),其中,a,b,c,d表示平面的描述参数;由仿射变换知,两平面之间满足如下关系:
[0034]
式中:
[0035]
其中α为绕x轴的旋转角度;β为绕y轴的旋转角度;γ为绕z轴的旋转角度;
[0036]
将旋转矩阵线性化,分离九个参数转换为三个参数:
[0037][0038]
分别对α,β,γ关于a2,b2,c2求偏导,最终的线性模型如下:v=bx-l
[0039]
其中:
[0040][0041]
其中为a2的估计值,的估计值,的估计值,为b2的估计值,的估计值,的估计值,为c2的估计值,的估计值,的估计值,为d2的估计值,
[0042]
按间接平差原理,可计算出变换矩阵中各参数改正值:
[0043]
优选地,所述s4包括:
[0044]
以平面到平面的距离的均方根误差和迭代次数作为约束条件,对于配准后的任一
同名平面(pi,qi),计算它们之间的欧式距离d
pq
,则均方根误差rmse为:
[0045]
当rmse小于设定阈值时则表示配准成功,同时给定迭代次数约束,避免在均方根误差不满足设定阈值的情况下,出现无限循环迭代;
[0046]
用坐标转换参数构建旋转矩阵和平移向量:
[0047][0048]
其中r为旋转矩阵,r(1,1)为旋转矩阵中的第一行第一列元素,r(1,2)为旋转矩阵中的第一行第二列元素,r(1,3)为旋转矩阵中的第一行第三列元素,r(2,1)为旋转矩阵中的第二行第一列元素,r(2,2)为旋转矩阵中的第二行第二列元素,r(2,3)为旋转矩阵中的第二行第三列元素,r(3,1)为旋转矩阵中的第三行第一列元素,r(3,2)为旋转矩阵中的第三行第二列元素,r(3,3)为旋转矩阵中的第三行第三列元素;t为平移向量,t(1,1)为平移向量中的第一行第一列元素,t(2,1)为平移向量中的第二行第一列元素,t(3,1)为平移向量中的第三行第一列元素;
[0049]
坐标转换模型如下:
[0050]
其中x
target
为目标点云中任意一点的x坐标,y
target
为目标点云中任意一点的y坐标,z
target
为目标点云中任意一点的z坐标,x
source
为源点云中任意一点的x坐标,y
source
为源点云中任意一点的y坐标,z
source
为目标点云中任意一点的z坐标。
[0051]
与现有技术相比,本发明的有益效果是:对平面点云数据进行多分区的最小二乘拟合,对点到分区拟合平面的距离进行统计分析,将点云数据中的噪点进行剔除,克服了点云数据中飞点、噪声等对后续平面拟合精度的影响;使用最小中值平方算法,无需设置过多参数就能够自适应剔除异常点对平面拟合过程的影响,具有较高的工程应用价值;
[0052]
根据同名平面的参数构建对应关系,使用间接平差模型计算转换参数,方法简单、计算速度快,能够有效解决大角度的旋转问题;以基于平面特征的配准方法,实现激光扫描与倾斜实景点云数据的融合,效率快、精度高,克服了海量点云数据对配准效率的影响,不同扫描仪器对配准精度的影响。
附图说明
[0053]
图1是本发明的技术流程图;
[0054]
图2是平面交互提取示意图1;
[0055]
图3是平面交互提取示意图2;
[0056]
图4是多分区最小二乘拟合去噪示意图1;
[0057]
图5是多分区最小二乘拟合去噪示意图2;
[0058]
图6是最小中值平方法平面拟合过程图;
[0059]
图7是点云初始位置图1;
[0060]
图8是点云初始位置图2;
[0061]
图9是配准结果图1;
[0062]
图10是配准结果图2。
具体实施方式
[0063]
下面结合具体实施方式对本发明作进一步详细说明:
[0064]
一种桥梁基础设施激光扫描与倾斜实景点云数据拼接方法,如图1,包括:
[0065]
s1.多分区最小二乘平面拟合去噪,如图4和图5;
[0066]
s1.1.人工交互提取共有平面,如图2和图3;
[0067]
s1.2.多分区最小二乘平面拟合,如图6;
[0068]
s2.对删除离群点后的所有平面点云进行最小中值平方法拟合平面,获取平面模型系数;
[0069]
s3.基于同名平面点云的平面模型系数,利用间接平差法计算激光扫描点云与倾斜实景点云数据之间的转换参数,根据转换参数实现激光扫描点云与倾斜实景扫描点云之间的高精度融合;
[0070]
s4.以平面到平面的距离的均方根误差和迭代次数作为约束条件进行迭代运算,完成点云数据拼接。
[0071]
以某高速简支梁桥为例,激光扫描与倾斜实景点云的初始位置如图7、8所示,其中图7为俯视图,图8为主视图;融合结果如图9、10所示,其中图9为俯视图,图10为主视图。
[0072]
所述s1包括:在每一个平面点云数据中进行空间多分区的最小二乘平面拟合,对离散点到分区拟合平面的距离进行累计与统计分析,将远离拟合平面的点作为离群点删除;
[0073]
通过软件显示出的点云数据,将激光扫描点云和倾斜实景点云数据中同一平面特征目标提取出来。
[0074]
所述s1.2包括:
[0075]
对于点云数据中的任意一点pi(xi,yi,zi),以pi为中心,r为半径进行球邻域搜索,如果该球形邻域内pi的近邻点个数小于3,则将pi点标记为离群点删除;如果近邻点个数大于3,则将pi其邻域内的点构建协方差矩阵m3×3:式中,m是点pi的临近点个数,m》3;是pi及其m个临近点的三维质心当i=0时表示pi点本身;
[0076]
求解该协方差最小特征值对应的归一化特征向量即为局部平面的单位法向量,进而可得pi到局部平面的距离di为:
[0077]
遍历计算每个点到局部平面距离的均值μ:
[0078]
标准差σ:
[0079]
当某一点pi到局部平面的距离在(μ-σ,μ+σ)范围内时保留该点,不在该范围则定义为离群点删除。
[0080]
所述s2包括:
[0081]
s3.1.随机选取平面内三点,计算模型参数,从平面点云中随机选取3个点,通过这3个点求解平面方程;假设选取的3个点为p1(x1,y1,z1),p2(x2,y2,z2),p3(x3,y3,z3),可得:
[0082][0083]
平面的单位法向量n为:
[0084]
已知平面的单位法向量和平面上的一点p1,可求得平面方程的系数;
[0085]
s3.2.计算各点到s2.1中所得到的平面的距离dis,并统计距离的平方中值ω,迭代计算k次;
[0086]
s3.3.选取k次迭代中ω的最小值所对应的拟合平面为最佳拟合平面,并根据式(1)、式(2)计算出每个数据对应的权值,通过权值自适应剔除异常点;
[0087]
式中,σ为稳健标准差;n为点的个数;ri表示第i个点与拟合平面之间的距离;med表示距离的中值;
[0088]
式中,wi表示第i个点的权重,权重为0则认为是异常点;
[0089]
s3.4.在剔除异常点之后的点集中,计算每个点到最佳拟合平面的距离,将距离小于给定阈值的点作为内点;
[0090]
s3.5.对内点采用最小二乘法重新计算平面模型的参数。
[0091]
所述s3包括:
[0092]
坐标转换模型的获取,基于同名平面点云的平面模型系数,构建间接平差模型,计算激光扫描点云与倾斜实景扫描点云之间的平移向量;
[0093]
设同一平面在坐标系o
1-x1y1z1中表示为p(a1,b1,c1,d1),在坐标系o
2-x2y2z2中表示为q(a2,b2,c2,d2),其中,a,b,c,d表示平面的描述参数;由仿射变换知,两平面之间满足如下关系:
[0094]
式中:
[0095]
其中α为绕x轴的旋转角度;β为绕y轴的旋转角度;γ为绕z轴的旋转角度;
[0096]
将旋转矩阵线性化,分离九个参数转换为三个参数:
[0097][0098]
分别对α,β,γ关于a2,b2,c2求偏导,最终的线性模型如下:v=bx-l
[0099]
其中:
[0100][0101]
其中为a2的估计值,的估计值,的估计值,为b2的估计值,的估计值,的估计值,为c2的估计值,的估计值,的估计值,为d2的估计值,
[0102]
按间接平差原理,可计算出变换矩阵中各参数改正值:
[0103]
所述s4包括:
[0104]
以平面到平面的距离的均方根误差和迭代次数作为约束条件,对于配准后的任一同名平面(pi,qi),计算它们之间的欧式距离d
pq
,则均方根误差rmse为:
[0105]
当rmse小于设定阈值时则表示配准成功,同时给定迭代次数约束,避免在均方根误差不满足设定阈值的情况下,出现无限循环迭代;
[0106]
用坐标转换参数构建旋转矩阵和平移向量:
[0107][0108]
其中r为旋转矩阵,r(1,1)为旋转矩阵中的第一行第一列元素,r(1,2)为旋转矩阵中的第一行第二列元素,r(1,3)为旋转矩阵中的第一行第三列元素,r(2,1)为旋转矩阵中的第二行第一列元素,r(2,2)为旋转矩阵中的第二行第二列元素,r(2,3)为旋转矩阵中的第二行第三列元素,r(3,1)为旋转矩阵中的第三行第一列元素,r(3,2)为旋转矩阵中的第三行第二列元素,r(3,3)为旋转矩阵中的第三行第三列元素;t为平移向量,t(1,1)为平移向量中的第一行第一列元素,t(2,1)为平移向量中的第二行第一列元素,t(3,1)为平移向量中的第三行第一列元素;
[0109]
坐标转换模型如下:
[0110]
其中x
target
为目标点云中任意一点的x坐标,y
target
为目标点云中任意一点的y坐标,z
target
为目标点云中任意一点的z坐标,x
source
为源点云中任意一点的x坐标,y
source
为源点云中任意一点的y坐标,z
source
为目标点云中任意一点的z坐标。
[0111]
当然,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1