一种基于离散信源融合分析技术的无感识别系统与方法与流程
1.本发明涉及一种基于离散信源融合分析技术的无感识别系统与方法,属于人工智能技术领域。
背景技术:
2.随着人工智能技术的快速发展,科技的进步正逐渐改变人们的生活方式,便捷支付、便捷出行、便捷购物等生活方式逐渐受到人们的青睐。然而,在实际的生活中,支付、购物、出行等场景还是通过手机扫码或者刷卡完成身份识别和支付,操作不够便捷。同时,受全球新冠疫情的影响,采用传统的身份识别和支付方式,当人员较多时会出现排队拥挤,不利于新冠疫情的防控,导致人员相互交叉感染。不管是扫码还是刷卡识别,都需人们通过双手进行操作,降低了身份识别的效率,无法给人们带来满意的识别或支付体验。近几年,随着人脸识别技术的成熟,在安防、零售、交通等领域,通过刷脸可实现快速的身份验证,然而,目前的刷脸方式要求人员在人脸识别器前驻留,并将面部对准设备方能完成识别,仍然无法实现自由通行、无感识别的高品质用户体验。
技术实现要素:
3.发明目的:本发明的目的在于提供一种离散信源融合分析技术的无感识别系统与方法,用于满足人员在自由通行、无感无知的情况下完成身份的识别验证。
4.技术方案:一种离散信源融合分析技术的无感识别系统,该系统包括图像数据采集单元、手机信号数据采集单元和网络数据传输单元、数据处理单元、身份识别单元、云控制平台;所述图像数据采集单元通过一个或多个摄像头分别在设定区域内外部的不同位置、不同时间、不同角度对人脸图像、人物姿态以及行为动作进行数据采集;所述手机信号数据采集单元在设定区域进行手机专属的imsi信号以及电话号码有关数据信号进行采集;所述数据处理单元对图像采集单元和手机信号数据采集单元通过网络数据传输单元所采集到的数据进行分析与处理;通过所述的身份识别单元完成人员身份确认,并通过网络数据传输单元上传至云控制平台。
5.所述图像数据采集单元由一个或一个以上的监控装置组成,设置在所设定区域出入口、区域内部多处位置,该图像数据采集单元采用图像识别技术从不同区域、不同角度、不同时间所经过的人员图像数据进行采集;
6.所述手机信号数据采集单元在所设定区域出入口、区域内部多处位置,通过不同位置完成对入站人员手机imsi信号和电话号码数据信息的采集;
7.所述数据处理单元一方面对图像数据采集单元采集到的多源数据信息进行融合处理,得到高精度图像数据,另一方面通过对手机imsi信号和电话号码数据分析与处理,采用边缘计算方法,得到精确数据;
8.所述身份识别单元通过数据处理单元图像数据的获取,采用基于正交视图的多姿态人脸识别计算方法,完成对所经过人员信息身份的确认,并通过所获得的人员手机imsi
信号和电话号码完成对人员身份信息的核验;
9.所述云控制平台通过网络数据传输单元将身份识别单元所识别出的人员身份信息发送至云控制平台。
10.一种离散信源融合分析技术的无感识别系统的识别方法,步骤如下:
11.(1)根据实际环境的应用需求,对所设定区域内进行图像数据采集单元的布置,选择在不同位置、不同角度安装图像数据采集单元,数量为n;
12.(2)通过建立人脸3d模型和多姿态人脸识别算法提取面部特征,完成对人员身份的识别;
13.(3)通过步骤(2)所提取的面部特征建立一个能反应面部特征的3d网格模型;
14.(4)基于步骤(3)建立的含有人脸几何特征和纹理信息的3d网络模型,利用基于正交视图的人脸识别算法完成对人脸身份信息的确认;
15.(5)人脸在空间范围内有三个自由度(x,y,z),假设整个区域内人脸个数为s,把整个区域内人脸图像按个体和姿态差异记为(m
×
n)
×
s个子类,把第j个体的第i姿态的人脸图像记为c
ij
,其中c
ij
的投影权值矢量为w
ij
,待识别人脸图像在第i姿态的投影权值矢量为从而可得知待识别人脸图像与c
ij
的欧式距离为欧式距离的大小越小,两图像越相关;
16.(6)根据步骤(5)设定待识别人脸图像是第j个体在第i个体姿态上的置信度为h
ij
,其中h
ij
=(a-d
ij
)/a,且则人脸识别结果为person=j
*
,姿态识别结果为pose=i
*
;
17.(7)利用在所涉区域内的基站采集所经过人群的imsi信号和电话号码的采集,通过与后台数据库的比对确定所持imsi信号或电话号码人员信息的身份,利用bp神经网络算法对不同类型的多源数据进行融合;
18.(8)通过上述对数据采集单元数据的融合算法,根据计算结果采取数据融合可信度较高的情况,完成对通过设定区域人员信息的身份识别,并将身份处理单元所得到的结果通过数据传输单元上传至云控制平台。
19.所述步骤(2)首先通过正面及侧面的图像数据采集单元所得到的人脸图像,通过弹性模板技术提取人脸的正面、侧面几何特征,特征包括人脸面部的所有器官。
20.所述步骤(3)具体为:
21.(3.1)通过步骤(2)所提取的面部特征建立一个能反应面部特征的3d网格模型,为了模拟出人脸面部皮肤的粘弹特性,建立一个自动变形模型。设是空间网格结点,假设结点f0被移动到f
′0,该结点的移动将会影响其他结点f1,f2,......,fn做相应的位置移动,而是图像中的固定结点;对所移动的结点位置进行计算;
22.(3.2)假设f
′0,f
′1,f
′2,......,f
′n是结点f0,f1,f2,......,fn移动后的位置结点,e
′0,e
′1,e
′2,......,e
′n是图像平衡时的网线向量,t=x
′1,y
′1,z
′1,x
′2,y
′2,z
′2,......,x
′n,y
′n,zn是结点f
′0,f
′1,f
′2,......,f
′n的坐标向量,其中e是空间网格的网线个数,则:
[0023][0024]
v={v0,v1,...,vn,v
′1,v
′2,...,v
′n}是空间网格结点的集合,v
′1,v
′2,...,v
′n是结点v1,v2,...,vn的新位置;c,a1,a2,.......,ae是加权系数;
[0025]
(3.3)根据步骤(3.2)完成对图像数据几何信息3d模型的建立,接下来将图像数据采集单元其他方位所采集到的人的纹理信息加到3d模型上,假设为双二次曲面片,对曲面片整体方向上每点方向的平均值计算,其中有:
[0026]
u方向:
[0027]
v方向:
[0028]ru
表示选取从正面方向得到人的纹理信息,rv表示从侧面方向得到的人的纹理信息。
[0029]
所述步骤(7)具体为:
[0030]
(7.1)设定s为分层后的分解系数,λ为设定的阈值,其中对于软阈值的处理公式有:
[0031][0032]
对所使用的数据采集单元采用小波阈值的方式去噪,通过软阈值函数进行阈值处理得到小波系数,对小波系数进行重构,所得到的信号为去噪后信号;
[0033]
(7.2)将数据采集单元i和数据采集单元j的采样数据si和sj之间的差值的绝对值的定义为绝对距离dis
ij
,则有:
[0034]
dis
ij
=|s
i-sj|
[0035]
时间t时,数据采集单元i和j的采样数据si和sj的融合程度c
ij
为:
[0036][0037]
时间t时,样本数据的融合度矩阵为:
[0038][0039]
时间t时,数据采集单元i的一致融合度ui(t)的计算公式为:
[0040][0041]
时间t时,数据采集单元i的分布均衡度τi(t)计算公式为:
[0042][0043]
时间t时,则数据采集单元i的可信度系数ωi(t)为:
[0044][0045]
则最终的数据融合结果可信度为:
[0046][0047]
m为空间网格结点个数。
[0048]
有益效果:本发明通过先进的技术手段,提供了一种能有效对人员身份信息进行无感识别的技术,从而解决了传统的身份识别验证时间长、效率低等问题。本发明产出的技术成果,能有效提高对人脸识别效率,让用户在行进中就能完成身份信息的验证识别,为未来的无感识别乘车、无感支付等场景提供了技术支撑,提高了人们出行的便利性,让用户体会到科技进步带来的舒适感。
[0049]
同时,该项技术的实现,通过无感识别实现无接触通行进出,减少公共空间接触,更加便捷和安全。
[0050]
本发明的技术成果将广泛应用于电子支付、门禁系统、公共安全、自助服务等领域,为未来的无感支付、自由流通行等场景提供技术支撑,基于不同空间、不同时间、不同算法融合的无感识别技术所采集到的基础数据,应用到运营方数据平台时所产生的城市大数据,能为智慧城市建设提供更多的数据支撑。
附图说明
[0051]
图1是人脸的三个自由度的示意图;
[0052]
图2是基于3d模型的多姿态人脸识别算法程序示意图;
[0053]
图3是图像数据采集单元示意图;
[0054]
图4是多个传感器数据融合过程图;
[0055]
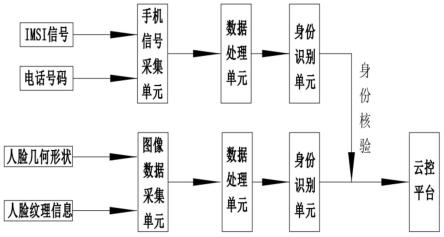
图5是系统原理框图。
具体实施方式
[0056]
下面结合附图对本发明的技术方案作进一步说明。
[0057]
如图5所示,本发明提供一种技术方案:本发明提出了一种离散信源融合分析技术的无感识别系统与方法,该系统包括云控制平台、数据处理单元、图像数据采集单元、手机信号数据采集单元和网络数据传输单元等。其中所述的图像数据采集单元主要通过一个或多个摄像头分别在设定区域内外部的不同位置、不同时间、不同角度对人脸图像、人物姿态以及行为动作进行数据采集;其中所述的手机信号采集单元主要在设定区域进行手机专属的imsi信号以及电话号码等有关数据信号进行采集;其中所述的数据处理单元主要是对图像采集单元和手机信号采集单元通过网络数据传输单元所采集到的数据进行分析与处理;
通过所述的身份识别单元完成人员身份确认,并通过网络数据传输单元上传至云控制平台;
[0058]
以下将对本发明各个部分做进一步的详细介绍:
[0059]
1、图像数据采集单元——图像数据采集单元由一个或一个以上的监控装置组成,主要设置在所设定区域出入口、区域内部等多处位置。该数据采集单元主要是采用图像识别技术从不同区域、不同角度、不同时间所经过的人员图像数据进行采集。图3是图像数据采集单元示意图;
[0060]
2、手机信号采集单元——手机信号采集单元主要在所设定区域出入口、区域内部等多处位置。通过不同位置完成对入站人员手机imsi信号和电话号码数据信息的采集。
[0061]
3、数据处理单元——数据处理单元一方面是对图像数据采集单元采集到的多源数据信息进行融合处理,得到较为精确的高精度图像数据。另一方面是通过对手机imsi信号和电话号码数据的分析与处理,采用边缘计算方法,得到较为精确的数据。
[0062]
4、身份识别单元——通过数据处理单元图像数据的获取,采用基于正交视图的多姿态人脸识别计算方法,完成对所经过人员信息身份的确认,并通过所获得的人员手机imsi信号和电话号码完成对人员身份信息的核验,有效提高人员身份信息识别的准确度。
[0063]
5、云控制平台——通过网络数据传输单元将身份识别单元所识别出的人员身份信息发送至云控制平台。
[0064]
本发明提出的一种离散信源融合分析技术的无感识别系统与方法,其具体步骤如下:
[0065]
步骤1:根据实际环境的应用需求,对所设定区域内进行图像数据采集单元的布置,选择在不同位置、不同角度安装图像数据采集单元,数量为n。
[0066]
步骤2:通过建立人脸3d模型和多姿态人脸识别算法,完成对人员身份的识别,具体步骤如图2所示。首先通过正面及侧面的图像采集单元所得到的的人脸图像,通过弹性模板技术提取人脸的正面、侧面几何特征(包括人脸面部的所有器官)。
[0067]
步骤3:通过步骤2所提取的面部特征建立一个能反应面部特征的3d网格模型,为了模拟出人脸面部皮肤的粘弹特性,建立一个自动变形模型。设是空间网格结点,假设结点f0被移动到f
′0,该结点的移动将会影响其他结点做相应的位置移动,而是图像中的固定结点。我们需要对所移动的结点位置进行计算。
[0068]
步骤4:假设f
′0,f
′1,f
′2,......,f
′n是结点f0,f1,f2,......,fn移动后的位置结点,e
′0,e
′1,e
′2,......,e
′n是图像平衡时的网线向量,t=x
′1,y
′1,z
′1,x
′2,y
′2,z
′2,......,x
′n,y
′n,z
′n是结点f
′0,f
′1,f
′2,......,f
′n的坐标向量,其中e是空间网格的网线个数,则:
[0069][0070]
步骤5:根据步骤4完成对图像数据几何信息3d模型的建立,接下来将图像数据采集单元其他方位所采集到的人的纹理信息加到3d模型上,假设为双二次曲面片,通过对曲面片整体方向上每点方向的平均值计算得:
其中有:
[0071]
u方向:
[0072]
v方向:
[0073]
步骤6:通过步骤3,步骤4,步骤5完成对含有人脸几何特征和纹理信息的3d模型建立,随后将基于正交视图的人脸识别算法完成对人脸身份信息的确认。
[0074]
步骤7:人脸在空间范围内有三个自由度(x,y,z),如图1所示。假设整个区域内人脸个数为s,把整个区域内人脸图像按个体和姿态差异记为(m
×
n)
×
s个子类,把第j个体的第i姿态的人脸图像记为c
ij
,其中c
ij
的投影权值矢量为w
ij
,待识别人脸图像在第i姿态的投影权值矢量为从而可得知待识别人脸图像与c
ij
的欧式距离为欧式距离的大小越小,两图像越相关。
[0075]
步骤8:根据步骤7设定待识别人脸图像是第j个体在第i个体姿态上的置信度为h
ij
,其中h
ij
=(a-d
ij
)/a,且则人脸识别结果为person=j
*
,姿态识别结果为pose=i
*
。
[0076]
步骤9:同时利用在所涉区域内的基站采集所经过人群的imsi信号和电话号码的采集,通过与后台数据库的比对确定所持imsi信号或电话号码人员信息的身份,利用bp神经网络算法对不同类型的多源数据进行融合;
[0077]
步骤9.1:设定s为分层后的分解系数,λ为设定的阈值,其中对于软阈值的处理公式有:
[0078][0079]
对所使用的数据采集单元采用小波阈值的方式去噪,通过软阈值函数进行阈值处理得到小波系数,对小波系数进行重构,所得到的信号为去噪后信号。
[0080]
步骤9.2:将数据采集单元i和数据采集单元j的采样数据si和sj之间的差值的绝对值的定义为绝对距离disij,则有:
[0081]
disij=|s
i-sj|
[0082]
时间t时,数据采集单元i和j的采样数据si和sj的融合程度c
ij
为:
[0083][0084]
时间t时,样本数据的融合度矩阵为:
[0085][0086]
时间t时,数据采集单元i的一致融合度ui(t)的计算公式为:
[0087][0088]
时间t时,数据采集单元i的分布均衡度τi(t)计算公式为:
[0089][0090]
时间t时,则数据采集单元i的可信度系数ωi(t)为:
[0091][0092]
则最终的数据融合结果可信度为:
[0093][0094]
步骤10:通过上述对数据采集单元数据的融合算法,根据计算结果采取数据融合可信度较高的情况,完成对通过设定区域人员信息的身份识别,并将身份处理单元所得到的结果通过数据传输单元上传至云控制平台。图4是多个传感器数据融合过程图。
[0095]
本发明的使用方法如下,当有用户进入所设定区域时,位于区域上方的多个图像数据采集单元会对所经过的人群分别进行多方位、多角度的图像数据采集,通过建立特定的人脸3d模型,经数据处理单元和身份识别单元完成所经过人群身份信息的识别,同时通过基站完成所进入人员手机imsi信号和电话号码的数据采集,采集到的手机数据信号通过数据处理单元和身份识别单元完成对人员身份信息核验,并将所得到的信息对图像数据采集单元所得到的结果进行验证,完成对人员身份信息的精准识别,最后通过数据传输单元上传至云控制平台。
[0096]
本发明具体原理为:人员在进入所预设区域时,位于区域上方的各处摄像头将会采集人脸信息进行数据库比对,在进行人脸识别过程中,由于摄像头是处于固定状态,而人脸不是固定的,需要在预设区域多处设置不同角度、不同方位的摄像头用于采集不同状态下的人脸信息,将多源信道所采集到的关于同一目标图像数据经后台进行数据分析与处理,采用边缘计算处理方式提取各信道中的有力数据,建立人脸3d模型,并通过多姿态人脸识别算法,在乘客到达无障碍乘车通道前,识别得到人脸身份信息,同时在乘客进入预设区域时进行手机的imsi信号和电话号码采集,通过人脸信息和手机信号数据的双层识别,能有效提高身份识别的准确率,提高身份验证效率,通过无感识别实现无接触通行进出,减少公共空间接触,更便捷、更健康、更安全。
[0097]
本发明申请的可以取得以下效果:
[0098]
1、通过离散信源融合分析技术,能有效提高分类识别精度,避免单一数据采集装置因物体遮挡或信号无法捕捉情况时无法进行身份识别,离散信源融合分析技术可精确完成对人员身份信息识别,提高身份识别准确率。
[0099]
2、通过不同视角下的人脸识别和手机信号感知实现无感识别,人员无需携带其他物品和卡片进行识别验证操作,有效缩减人工核验时间,同时减少工作人员的管理工作量,降低人力支出成本。
[0100]
3、通过先进的技术手段,满足人员在自由通行、无感无知的情况下完成身份的识别验证,解决传统识别方式效率低、体验差的缺点,提高了用户出行体验感。
[0101]
4、通过本发明的无感识别技术,能为未来的无感支付、自由流通行等场景提供技
术支撑,基于不同空间、不同时间、不同算法融合的无感识别技术所采集到的基础数据,应用到运营方数据平台时所产生的城市大数据,能为智慧城市建设提供更多的数据支撑。
[0102]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1