基于空间域凸优化的燃料电池汽车节能驾驶方法及装置
1.本发明属于燃料电池汽车节能驾驶领域,具体涉及基于空间域凸优化的燃料电池汽车节能驾驶方法及装置。
背景技术:
2.燃料电池汽车多交叉口节能驾驶耦合了信号灯约束下的车速规划和不同能量源间的功率分配,是一个难以快速求解的复杂问题。寻找针对该问题的轻量化计算方法对实现节能驾驶算法实车部署从而进一步发挥燃料电池汽车的节能优势具有重要价值。
3.利用凸优化算法最优性和实时性兼具的优势,已有相关研究提出了时间域内燃料电池汽车多交叉口节能驾驶的分层凸优化方法。然而,针对车速规划和能量管理耦合的燃料电池汽车节能驾驶问题,分层优化只能获得分层子问题的最优解,而非全局最优解。
技术实现要素:
4.本发明所为了解决背景技术中存在的技术问题,目的在于提供了基于空间域凸优化的燃料电池汽车节能驾驶方法及装置,该方法在空间域内对燃料电池汽车多交叉口节能驾驶问题进行凸近似和凸松弛,实现高效计算并获得全局最优解。
5.为了解决技术问题,本发明的技术方案是:
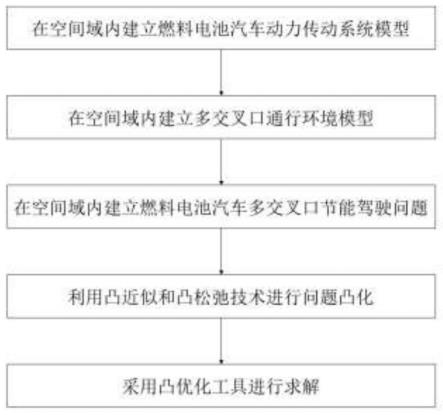
6.基于空间域凸优化的燃料电池汽车节能驾驶方法,包括以下步骤:
7.s1.在空间域内建立燃料电池汽车动力传动系统模型;
8.s2.在空间域内建立多交叉口通行环境模型;
9.s3.基于燃料电池汽车动力传动系统模型和多交叉口通行环境模型,在空间域内建立燃料电池汽车多交叉口节能驾驶问题;
10.s4.利用凸近似和凸松弛技术对燃料电池汽车多交叉口节能驾驶问题进行凸化,得到凸化后的多交叉口节能驾驶问题;
11.s5.采用凸优化工具对凸化后的多交叉口节能驾驶问题进行求解,得到最优决策,即实现了燃料电池汽车多交叉口节能驾驶方法。
12.进一步,所述燃料电池汽车动力传动系统模型,包括:车辆纵向动力学模型、电机模型、燃料电池系统模型和动力电池模型。
13.进一步,建立车辆纵向动力学模型:
14.车辆纵向动力学,如下公式所示:
[0015][0016]
其中,t、s、v、m、fr和a分别表示车辆的位置、车速、质量、滚动阻力系数和迎风面积;f
drv
和f
brk
分别表示车轮处的电机机械力和刹车片制动力;g表示重力加速度;θ(s)表示
道路坡度;ρ和cd分别表示空气密度和空气阻力系数;
[0017]
车轮处的需求功率p
dmd
,如下公式所示:
[0018]
p
dmd
=(f
drv
+f
brk
)v;
[0019]
建立电机模型:
[0020]
电机转速ω
mot
和转矩t
mot
,如下公式所示:
[0021][0022][0023]
其中,r
whl
是轮胎滚动半径,i
fd
是主减速器传动比;
[0024]
电机的输出功率p
mot,m
和电功率p
mot,e
,如下公式所示:
[0025][0026][0027]
其中,η
mot
表示与ω
mot
和t
mot
有关的电机效率,sgn是符号函数;
[0028]
建立燃料电池系统模型:
[0029]
燃料电池系统氢气能量消耗功率ph可以表示为净功率p
fcs
的函数,如下公式所示:
[0030][0031]
其中,η
fcs
为燃料电池系统效率;
[0032]
建立动力电池模型:
[0033]
动力电池的等效电路模型,如下公式所示:
[0034][0035]
其中,v
bat
,v
oc
,i
bat
,r0,p
bat
和p
oc
分别表示动力电池电压、开路电压、电流、内阻、输出功率和化学功率。v
oc
和r0都是动力电池荷电状态soc的函数;
[0036]
动力电池电流i
bat
,如下公式所示:
[0037][0038]
电池系统动力学,如下公式所示:
[0039][0040]
其中,q
bat
表示电池容量;
[0041]
系统功率平衡关系,如下公式所示:
[0042]
p
mot,e
=p
fcs
+p
bat
。
[0043]
进一步,所述多交叉口通行环境模型的约束条件包括:信号灯约束、道路坡度干扰
和道路限速。
[0044]
进一步,步骤s3中所述的燃料电池汽车多交叉口节能驾驶问题,具体如下所示:
[0045]
优化目标j为:总的氢气能量消耗最小,状态变量为:车辆行驶时间t、车速v和动力电池荷电状态soc,控制变量为:轮端驱动力f
drv
和燃料电池系统净功率p
fcs
,约束条件包括:状态变量约束、控制变量约束和动力电池输出功率约束,初始车速和终端车速相等,初始soc和终端soc相等。
[0046]
进一步,步骤s4中所述的利用凸近似和凸松弛技术对燃料电池汽车多交叉口节能驾驶问题进行凸化,包括以下步骤:
[0047]
s41.重新定义燃料电池汽车多交叉口节能驾驶问题中状态变量和控制变量,将状态方程线性化;
[0048]
s42.对燃料电池汽车动力传动系统模型,利用凸近似分别表示电机、燃料电池系统和动力电池的输入端输出端功率关系;
[0049]
s43.利用凸松弛将状态变量约束和控制变量约束凸化;
[0050]
s44.采用智能驾驶员模型选择可行的绿灯窗口,并确定行驶时间的上下边界,将非线性的信号灯约束转化为线性的行驶时间约束。
[0051]
进一步,状态变量为车辆行驶时间t、车辆动能e
kin
和动力电池能量状态soe,控制变量为与车速v相关的虚拟变量fv=1/v、与电机输出功率p
mot,m
相关的虚拟力f
mot,m
=fvp
mot,m
、车速v、与电机电功率p
mot,e
相关的虚拟力f
mot,e
=fvp
mot,e
、与动力电池化学功率p
oc
相关的虚拟力f
oc
=fvp
oc
、与动力电池输出功率p
bat
相关的虚拟力f
bat
=fvp
bat
、与燃料电池系统净功率p
fcs
相关的虚拟力f
fcs
=fvp
fcs
、与燃料电池氢气能量消耗功率ph相关的虚拟力fh=fvph。
[0052]
进一步,电机的电功率可以拟合为输出功率的二次函数燃料电池系统的氢气能量消耗功率可以拟合为净功率的二次函数动力电池的输出功率和化学功率自然满足二次函数关系r0和v
oc
分别是动力电池的内阻和开路电压。
[0053]
进一步,所述步骤s43,具体包括以下步骤:
[0054]
s431.将fvv=1松弛为fvv≥1,并进一步转化为二阶锥约束;
[0055]
s432.将松弛为并进一步转化为二阶锥约束,其中m为车辆质量;
[0056]
s433.用相应的虚拟力替代二次函数fm中的功率,化简并松弛为并进一步转化为二阶锥约束;
[0057]
s434.用相应的虚拟力替代二次函数ff中的功率,化简并松弛为并进一步转化为二阶锥约束;
[0058]
s435.用相应的虚拟力替代二次函数fb中的功率,化简并松弛为并进一步转化为二阶锥约束。
[0059]
基于空间域凸优化的燃料电池汽车节能驾驶装置,所述装置,包括:
[0060]
第一建立模块,用于在空间域内建立燃料电池汽车动力传动系统模型;
[0061]
第二建立模块,用于在空间域内建立多交叉口通行环境模型;
[0062]
第三建立模块,基于燃料电池汽车动力传动系统模型和多交叉口通行环境模型,在空间域内建立燃料电池汽车多交叉口节能驾驶问题;
[0063]
凸化处理模块,用于利用凸近似和凸松弛技术对燃料电池汽车多交叉口节能驾驶问题进行凸化,得到凸化后的多交叉口节能驾驶问题;
[0064]
求解模块,采用凸优化工具对凸化后的多交叉口节能驾驶问题进行求解,得到最优决策,即实现了燃料电池汽车多交叉口节能驾驶方法。
[0065]
一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现上述任一项所述的方法。
[0066]
与现有技术相比,本发明的优点在于:
[0067]
(1)本发明提出的基于空间域凸优化的燃料电池汽车节能驾驶方法及装置,利用凸近似和凸松弛技术对燃料电池汽车多交叉口节能驾驶问题进行凸化,采用用凸优化工具对凸化后的多交叉口节能驾驶问题进行求解能够以高效的计算效率实现全局最优的能耗经济性;
[0068]
(2)本发明提出的基于空间域凸优化的燃料电池汽车节能驾驶方法及装置,能够轻易推广到其他车型,并具备实时应用潜力。
附图说明
[0069]
图1为本发明所提出的基于空间域凸优化的燃料电池汽车节能驾驶方法及装置流程图;
[0070]
图2为本发明中信号灯约束线性化后的车辆行驶时间边界。
具体实施方式
[0071]
下面结合实施例描述本发明具体实施方式:
[0072]
需要说明的是,本说明书所示意的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容能涵盖的范围内。
[0073]
同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
[0074]
实施例1:
[0075]
如图1所示,一种基于空间域凸优化的燃料电池汽车节能驾驶方法及装置,包括以下步骤:
[0076]
s1.在空间域内建立燃料电池汽车动力传动系统模型,包括车辆纵向动力学模型、电机模型、燃料电池系统模型和动力电池模型;
[0077]
s11.建立车辆纵向动力学模型
[0078]
车辆纵向动力学,如公式(1)所示:
[0079][0080]
其中,t、s、v、m、fr和a分别表示车辆的位置、车速、质量、滚动阻力系数和迎风面积;f
drv
和f
brk
分别表示车轮处的电机机械力和刹车片制动力;g表示重力加速度;θ(s)表示道路坡度;ρ和cd分别表示空气密度和空气阻力系数。
[0081]
车轮处的需求功率p
dmd
,如公式(2)所示:
[0082]
p
dmd
=(f
drv
+f
brk
)v
ꢀꢀ
(2);
[0083]
s12.建立电机模型
[0084]
电机转速ω
mot
和转矩t
mot
,如公式(3)和(4)所示:
[0085][0086][0087]
其中,r
whl
是轮胎滚动半径,i
fd
是主减速器传动比。
[0088]
电机的输出功率p
mot,m
和电功率p
mot,e
,如公式(5)和(6)所示:
[0089][0090][0091]
其中,η
mot
表示与ω
mot
和t
mot
有关的电机效率,sgn是符号函数。
[0092]
s13.建立燃料电池系统模型
[0093]
燃料电池系统氢气能量消耗功率ph可以表示为净功率p
fcs
的函数,如公式(7)所示:
[0094][0095]
其中,η
fcs
为燃料电池系统效率。
[0096]
s14.建立动力电池模型
[0097]
动力电池的等效电路模型,如公式(8)所示:
[0098][0099]
其中,v
bat
,v
oc
,i
bat
,r0,p
bat
和p
oc
分别表示动力电池电压、开路电压、电流、内阻、输出功率和化学功率。v
oc
和r0都是动力电池荷电状态soc的函数。
[0100]
动力电池电流i
bat
,如公式(9)所示:
[0101][0102]
电池系统动力学,如公式(10)所示:
[0103][0104]
其中,q
bat
表示电池容量。
[0105]
系统功率平衡关系,如公式(11)所示:
[0106]
p
mot,e
=p
fcs
+p
bat
ꢀꢀꢀ
(11);
[0107]
s2.在空间域内建立多交叉口通行环境模型,包括信号灯约束、道路坡度干扰和道路限速;
[0108]
道路坡度干扰为θ(s),道路限速为v
lim
,信号灯约束如下所示:
[0109]
在总长度为sf的道路上分布着n个交通信号灯路口,第i个信号灯的位置为si∈[0,sf],i∈{1,2,3...,n}。对于第i个信号灯,其红灯和绿灯持续时间分别为和其信号周期内时间是行驶时间t的函数,如公式(12)所示:
[0110][0111]
其中是信号灯周期,是的初值,即时间偏移。的零点定义在红灯起始时刻。
[0112]
为了避免闯红灯,车辆需要满足信号灯约束,如公式(13)所示:
[0113][0114]
s3.在空间域内建立燃料电池汽车多交叉口节能驾驶问题;
[0115]
优化目标j为总的氢气能量消耗最小,状态变量为车辆行驶时间t、车速v和动力电池荷电状态soc,控制变量为轮端驱动力f
drv
和燃料电池系统净功率p
fcs
,约束条件包括状态变量约束、控制变量约束和动力电池输出功率约束,初始车速和终端车速相等,初始soc和终端soc相等,如公式(14)所示:
[0116][0117]
其中,{
·
}
min
和{
·
}
max
分别是相应变量的最小值和最大值。
[0118]
s4.利用凸近似和凸松弛技术对燃料电池汽车多交叉口节能驾驶问题进行凸化;
[0119]
s41.重新定义状态变量和控制变量,将状态方程线性化;
[0120]
其中,状态变量为车辆行驶时间t、车辆动能e
kin
和动力电池能量状态soe,控制变量为与车速v相关的虚拟变量fv=1/v、与电机输出功率p
mot,m
相关的虚拟力f
mot,m
=fvp
mot,m
、车速v、与电机电功率p
mot,e
相关的虚拟力f
mot,e
=fvp
mot,e
、与动力电池化学功率p
oc
相关的虚拟力f
oc
=fvp
oc
、与动力电池输出功率p
bat
相关的虚拟力f
bat
=fvp
bat
、与燃料电池系统净功率p
fcs
相关的虚拟力f
fcs
=fvp
fcs
、与燃料电池氢气能量消耗功率ph相关的虚拟力fh=fvph,如公式(15)所示:
[0121][0122]
其中,f
θ
=mg(sinθ+frcosθ),αa=ρacd,soe=q
batvoc
soc。
[0123]
s42.利用凸近似分别表示电机、燃料电池系统和动力电池的输入端输出端功率关系;
[0124]
其中,电机的电功率可以拟合为输出功率的二次函数燃料电池系统的氢气能量消耗功率可以拟合为净功率的二次函数动力电池的输出功率和化学功率自然满足二次函数关系r0和v
oc
分别是动力电池的内阻和开路电压。
[0125]
s43.利用凸松弛将新的状态变量约束和控制变量约束凸化;
[0126]
具体包括以下步骤:
[0127]
s431.将fvv=1松弛为fvv≥1,并进一步转化为二阶锥约束,如公式(16)所示:
[0128][0129]
s432.将松弛为并进一步转化为二阶锥约束,其中m为车辆质量,如公式(17)所示:
[0130][0131]
s433.用相应的虚拟力替代二次函数fm中的功率,化简并松弛为并进一步转化为二阶锥约束,如公式(18)所示:
[0132][0133]
s434.用相应的虚拟力替代二次函数ff中的功率,化简并松弛为并进一步转化为二阶锥约束,如公式(19)所示:
[0134][0135]
s435.用相应的虚拟力替代二次函数fb中的功率,化简并松弛为并进一步转化为二阶锥约束,如公式(20)所示:
[0136][0137]
s44.如图2所示,采用智能驾驶员模型选择可行的绿灯窗口,并确定行驶时间的上下边界,将非线性的信号灯约束转化为线性的行驶时间约束,如公式(21)所示:
[0138]
t
ref,min
≤t≤t
ref,max
ꢀꢀꢀ
(21);
[0139]
s45.目标函数和其余约束条件自然为凸,如公式(22)所示:
[0140][0141]
s5.采用凸优化工具进行求解,得到最优决策。
[0142]
采用凸优化工具,如cvxpy进行求解。
[0143]
实施例2:
[0144]
为了更好地实施以上方法,本发明实施例还提供基于空间域凸优化的燃料电池汽车节能驾驶装置;
[0145]
例如:
[0146]
第一建立模块,用于在空间域内建立燃料电池汽车动力传动系统模型;
[0147]
第二建立模块,用于在空间域内建立多交叉口通行环境模型;
[0148]
第三建立模块,基于燃料电池汽车动力传动系统模型和多交叉口通行环境模型,在空间域内建立燃料电池汽车多交叉口节能驾驶问题;
[0149]
凸化处理模块,用于利用凸近似和凸松弛技术对燃料电池汽车多交叉口节能驾驶问题进行凸化,得到凸化后的多交叉口节能驾驶问题;
[0150]
求解模块,采用凸优化工具对凸化后的多交叉口节能驾驶问题进行求解,得到最优决策,即实现了燃料电池汽车多交叉口节能驾驶方法。
[0151]
实施例3:
[0152]
本领域普通技术人员可以理解,上述实施例的各种方法中的全部或部分步骤可以通过指令来完成,或通过指令控制相关的硬件来完成,该指令可以存储于一计算机可读存储介质中,并由处理器进行加载和执行。
[0153]
为此,本发明实施例提供一种存储介质,其中存储有多条指令,该指令能够被处理器进行加载,以执行本发明实施例所提供的任一基于空间域凸优化的燃料电池汽车节能驾驶方法中的步骤。
[0154]
例如该指令可以执行如下步骤:
[0155]
s1.在空间域内建立燃料电池汽车动力传动系统模型;
[0156]
s2.在空间域内建立多交叉口通行环境模型;
[0157]
s3.基于燃料电池汽车动力传动系统模型和多交叉口通行环境模型,在空间域内
建立燃料电池汽车多交叉口节能驾驶问题;
[0158]
s4.利用凸近似和凸松弛技术对燃料电池汽车多交叉口节能驾驶问题进行凸化,得到凸化后的多交叉口节能驾驶问题;
[0159]
s5.采用凸优化工具对凸化后的多交叉口节能驾驶问题进行求解,得到最优决策,即实现了燃料电池汽车多交叉口节能驾驶方法。
[0160]
以上仅是本发明的优选实施方式,并不用于限制本发明,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本发明的保护范围。
[0161]
本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。本技术实施例中的方案可以采用各种计算机语言实现,例如,面向对象的程序设计语言java和直译式脚本语言javascript等。
[0162]
本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0163]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0164]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0165]
尽管已描述了本技术的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本技术范围的所有变更和修改。
[0166]
显然,本领域的技术人员可以对本技术进行各种改动和变型而不脱离本技术的精神和范围。这样,倘若本技术的这些修改和变型属于本技术权利要求及其等同技术的范围之内,则本技术也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1