一种辅助驾驶中基于深度学习的车道线检测方法与流程
1.本发明涉及图像处理技术,具体涉及一种辅助驾驶中基于深度学习的车道线检测方法。
背景技术:
2.即使在各种各样的条件下,人们也可以很容易地在道路上找到车道线。但是计算机并不容易。阴影,眩光,道路颜色的细微变化,线条的轻微障碍物,人们通常仍可以处理的所有事物,但计算机可能会遇到很大困难。
3.近年来,得益于计算机运算能力的提升,深度学习技术的能力越来越强,在各个领域中都成功的应用了深度学习技术。深度学习解决问题的新思路给了车道线检测这一问题带来了新的启发,很多学者开始尝试使用深度学习的方法来解决车道线检测问题。huval等人使用了一种传统的卷积神经网络进行车道线检测,这是首次将深度学习技术应用于车道线检测的研究之中。但是由于当时的卷积神经网络还处于较初级的发展阶段,性能不够强大,该网络不仅计算复杂,运行耗时,而且检测效果也一般。gurghian等人从摄像头采集的道路视频中提取了大量的车道线图像数据,提出了deep lane网络进行车道线检测,并把车道线检测问题建模为一个分类问题。seokju lee等人采取了一种新的栅格方式对车道线进行标注,将车道线的检测问题建模为一个回归问题。作者设计出了一个多任务的卷积网络结构(vpgnet),并且通过预测“消失点”对车道线的位置做进一步精确的限定,使其能够较为准确地实时检测出车道线。
技术实现要素:
4.本发明目的在于提供一种新的辅助驾驶中基于深度学习的车道线检测方法。
5.本发明提供了一种辅助驾驶中基于深度学习的车道线检测方法,用于对车道线的生成和检测,具有这样的特征,包括步骤:1)建立训练集和测试集,对输入图像数据进行归一化操作;2)搭建生成网络,所述生成网络具有若干潜变量层,潜变量是二值的,顶部两层之间的连接是无向的,而所有其他层之间的连接是有向的,所述生成网络具有l个隐藏层包含l个权重矩阵,同时也包含l+1个偏置向量;3)利用所述生成网络训练后获得的权重和偏置初始化多层感知器网络(mlp),然后训练所述多层感知器网络执行分类判别任务;4)将实际道路图像输入经过训练的生成网络,得到道路图像的车道线,将所述车道线叠加到实际道路图像,完成车道线检测。
6.在本发明提供的车道线检测方法,还具有这样的特征:使用visualdl可视化工具对数据进行展示。
7.在本发明提供的车道线检测方法,还具有这样的特征:其中,所述生成网络的概率分布由下式给出:
8.[0009][0010]
在实值可见单元的情况下,替换β为对角形式,w
(1)
,...,w
(l)
表示l个权重矩阵,b
(0)
,
…
,b
(l)
表示l+1个偏置向量,其中b
(0)
是可见层的偏置,h
(l)
是第l个隐藏层。
[0011]
在本发明提供的车道线检测方法,还具有这样的特征:使用对比散度或随机最大似然方法训练受限波尔兹曼机(rbm),rbm的参数定义了所述生成网络第一层的参数,然后,第二个rbm训练为近似最大化log p
(2)
(h
(1)
),其中p
(1)
是第一个rbm表示的概率分布,p
(2)
是第二个rbm表示的概率分布,h
(1)
是第一个隐藏层。
[0012]
与现有技术相比,本发明的有益效果是:
[0013]
本发明涉及一种车道线生成方法,通过训练的生成网络得到道路图像的车道线,从而提高了车道线检测的准确性,为自动驾驶的研发提供了保障。所述网络具有若干潜变量层的生成模型,每层的每个单元连接到每个相邻层中的每个单元,顶部两层之间的连接是无向的,而所有其他层之间的连接是有向的。通过该模型提升了生成结果的准确性,从而更好的应用到自动驾驶领域。
附图说明
[0014]
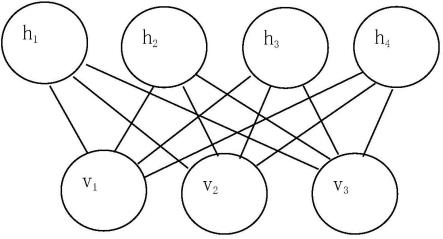
图1本技术生成网络的有向和无向连接的混合图模型;
[0015]
图2本技术的受限玻尔兹曼机。
具体实施方式
[0016]
下面结合附图1-2对本发明作进一步详细描述:
[0017]
以下对本发明一种自动驾驶中基于深度学习的车道线检测方法作具体阐述。
[0018]
本发明提供了一种辅助驾驶中基于深度学习的车道线检测方法,用于对车道线的生成和检测,具有这样的特征,包括步骤:1)建立训练集和测试集,对输入图像数据进行归一化操作;2)搭建生成网络,所述生成网络具有若干潜变量层,潜变量是二值的,顶部两层之间的连接是无向的,而所有其他层之间的连接是有向的,所述生成网络具有l个隐藏层包含l个权重矩阵,同时也包含l+1个偏置向量;3)利用所述生成网络训练后获得的权重和偏置初始化多层感知器网络(mlp),然后训练所述多层感知器网络执行分类判别任务;4)将实际道路图像输入经过训练的生成网络,得到道路图像的车道线,将所述车道线叠加到实际道路图像,完成车道线检测。
[0019]
在本发明提供的车道线检测方法,还具有这样的特征:其中,所述生成网络的概率分布由下式给出:
[0020][0021]
[0022]
在实值可见单元的情况下,替换β为对角形式,w
(1)
,...,w
(l)
表示l个权重矩阵,b
(0)
,...,b
(l)
表示l+1个偏置向量,其中b
(0)
是可见层的偏置,h
(l)
是第l个隐藏层。
[0023]
为了训练所述网络,我们可以使用对比散度或随机最大似然方法训练受限波尔兹曼机(rbm),rbm的参数定义了所述生成网络第一层的参数,然后,第二个rbm训练为近似最大化logp
(2)
(h
(1)
),其中p
(1)
是第一个rbm表示的概率分布,p
(2)
是第二个rbm表示的概率分布,h
(1)
是第一个隐藏层。换句话说,第二个rbm被训练为模拟由第一个rbm的隐藏单元采样定义的分布,而第一个rbm由数据驱动,这个过程能无限重复,从而向所述生成网络添加任意多层,其中每个新的rbm对前一个rbm的样本建模,训练好的所述网络可以直接用作生成模型。
[0024]
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0025]
在本发明的描述中,除非另有说明,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0026]
最后应说明的是,上述技术方案只是本发明的一种实施方式,对于本领域内的技术人员而言,在本发明公开了应用方法和原理的基础上,很容易做出各种类型的改进或变形,而不仅限于本发明上述具体实施方式所描述的方法,因此前面描述的方式只是优选的,而并不具有限制性的意义。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1