一种拼接式相机自适应辐射一致性校正方法及装置与流程
1.本发明涉及光学遥感图像信息处理技术领域及装置,特别是一种拼接式相机自适应辐射一致性校正方法。
背景技术:
2.单一式相机受制于探测器制造水平,难以大幅提升幅面,通过多镜头,多探测器组合构造的拼接式相机是实现大幅面成像的重要技术路线。然而,多镜头多探测器拼接式相机中,各块探测器受制于镜头光照、探测器数字后背响应差异等因素影响,拼接图像中不可避免的出现以探测器为单元的明暗相间的“块状效应”。传统的使用实验室定标的方法可以抑制这一亮度不一致现象。但是实验室定标方法需要大口径积分球等高端仪器设备,过程繁琐成本较高。获取的定标参数仅在航摄相机实际飞行获取图片时的目标亮度、积分时间、增益参数等与实验室定标一致时才能达到最优的效果。而实际飞行环境地物亮度多变,拍摄参数也应相应发生变化,有限的定标条件与多变的实际情况构成矛盾,制约了亮度一致性效果的进一步提升。
技术实现要素:
3.本发明要解决的技术问题是:克服现有技术的不足,解决了一景影像中多图像单元间的有效拼接问题。
4.本发明目的通过以下技术方案予以实现:
5.一种拼接式相机自适应辐射一致性校正方法,拼接式相机拍摄的一景影像包括多个探测器获取的图像单元,校正方法包括:
6.选取参考图像单元;
7.获取所有两两相邻图像单元间的约束区域,并确定约束区域的统计参数;
8.采用线性校正模型,线性校正模型中含有校正参数,根据两两相邻图像单元间的约束条件,建立含有校正参数的约束模型;基于参考图像单元,利用所述统计参数,求解得到校正参数;
9.利用校正参数,对多个探测器获取的图像单元进行校正。
10.一种拼接式相机自适应辐射一致性校正参数确定方法,拼接式相机拍摄的一景影像包括多个探测器获取的图像单元,校正参数确定方法包括:
11.选取参考图像单元;
12.获取所有两两相邻图像单元间的约束区域,并确定约束区域的统计参数;
13.采用线性校正模型,线性校正模型中含有校正参数,根据两两相邻图像单元间的约束条件,建立含有校正参数的约束模型;基于参考图像单元,利用所述统计参数,求解得到校正参数。
14.一种拼接式相机自适应辐射一致性校正装置,包括:
15.获取模块,用于获取拼接式相机拍摄的一景影像,该影像包括多个探测器获取的
图像单元;
16.选取模块,用于选取参考图像单元;
17.第一处理模块,用于获取所有两两相邻图像单元间的约束区域,并确定约束区域的统计参数;
18.第二处理模块,采用线性校正模型,线性校正模型中含有校正参数,根据两两相邻图像单元间的约束条件,建立含有校正参数的约束模型;基于参考图像单元,利用所述统计参数,求解得到校正参数;
19.校正模块,利用校正参数,对多个探测器获取的图像单元进行校正。
20.本发明相比于现有技术具有如下有益效果:
21.(1)常规辐射校正方法针对单镜头单探测器研制,对于多镜头多探测器相机应用效果受到制约,本发明方法适用于多镜头多探测器相机;
22.(2)本发明方法将所有相邻的图像单元全部引入最小二乘约束,对于不同镜头下图像单元间的辐射差异与同一镜头下不同视场图像单元差异,均能够产生较常规方法更好的均匀效果;
23.(3)与基于实验室测量的常规辐射校正方法相比,本发明方法无需在实验室测量校正参数,可基于图像直接自适应计算校正参数,成本低廉;
24.(4)与基于图像的常规辐射校正方法相比,本发明方法无需提取特征点并对多探测器进行配准,每两张相邻图像单元间仅构成均值与方差一致两组约束关系,计算量小,运算速度快,易于产业化应用;
25.(5)本发明方法在滤波去噪后计算各个相邻图像单元重叠区域的均值与方差统计指标,提升了指标计算的稳定性,能够适应小重叠率(《5%)拼接相机的辐射一致性校正需求;
26.(6)本发明方法选择方差最大的图像单元作为参考图像单元,在校正后,有利于提升其它图像单元的方差,提升整体影像的成像效果。
附图说明
27.图1为拼接式探测器辐射一致性校正9个图像单元示意。
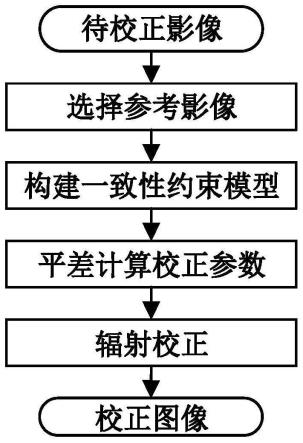
28.图2为本发明方法流程图。
具体实施方式
29.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明的实施方式作进一步详细描述。
30.实施例1:
31.一种拼接式相机自适应辐射一致性校正方法,直接利用拼接式航摄相机各探测器间的图像重叠区域自适应计算各块探测器的校正系数,校正由于多镜头透过率差异与探测器数字后背响应差异等因素影响导致的“块状效应”,实现探测器间亮度的一致性校正。该方法既适用于处理经过相对辐射校正后的图像,进一步提升拼接图像的亮度一致性,也可以直接对未经过相对辐射校正的图像直接进行处理。
32.具体的:
33.选取参考图像单元。对于拼接式相机拍摄的一景影像,遍历其中每个探测器获取的图像单元tj(j∈a,b..i),计算各个图像单元的方差s
tj
,排序后,选择方差最大的图像单元tj作为参考图像单元。
34.对于拼接式相机拍摄的一景影像,遍历其中每个探测器获取的图像单元,获取与其相邻图像单元间的约束区域,计算约束区域的均值,方差等统计指标。
35.其中,将相邻图像单元设计重叠区域直接作为相邻图像单元间的约束区域,使用中值滤波、均值滤波等去噪算法,对其进行滤波去噪后,计算各个重叠约束区域的均值与方差统计指标。
36.构建校正模型,选择线性模型作为图像单元的辐射一致性校正模型。每个图像单元设计2个校正参数,其中一个为偏置参数k,一个为增益参数b。
37.fj(x,y)=kj*gj(x,y)+bj38.其中x为图像横坐标,y为图像纵坐标。fj(x,y)为第j个图像单元校正后横坐标为x、纵坐标为y处的像素的灰度值,gj(x,y)则为第j个图像单元校正前横坐标为x、纵坐标为y处的灰度值,kj为第j个图像单元的偏置参数,bj为第j个图像单元的增益参数。
39.初始化参考图像单元校正参数。将选择的参考图像单元tj对应的校正参数kj初始化为1,bj初始化为0。其余图像单元的校正参数作为待解算值,以图1所示相机拼接情况为例,相机一景影像对应9个图像单元,包含18个校正参数,其中除参考图像单元对应的两个校正参数外,有16个校正参数待求解。
40.建立校正参数解算的约束模型,在任一两两相邻图像单元间构建约束方程,再将所有约束条件构成约束模型的法方程,使用最小二乘算法求解,得到校正参数。
41.设定图像校正的约束条件是校正后相邻的两组图像单元重叠约束区域的均值与方差指标相等。以图1中相邻的图像单元a与图像单元b为例,其重叠约束区域分别为构建约束条件如下:
[0042][0043][0044]
其中,为重叠约束区域校正后均值,方差为重叠约束区域校正后的方差。为重叠约束区域校正后均值,为重叠约束区域校正后的方差。
[0045]
根据线性校正模型计算:
[0046][0047][0048][0049][0050]
其中,为重叠约束区域校正前均值,为重叠约束区域校正前方差;为重叠约束区域校正前均值,为重叠约束区域校正前方差,ka为图像单元a的偏置参数,ba为图像单元a的增益参数,kb为图像单元b的偏置参数,bb为图像单元b的增益参数。
[0051]
代入相邻图像间的约束条件,建立一组相邻图像间的约束方程如下:
[0052][0053][0054]
遍历图像各图像单元,根据其与其它图像单元重叠相邻关系,将每组相邻约束均按照上述方法构建约束方程,获得所有相邻图像间的约束方程后,联立方程,获取整张图像中所有图像单元的校正参数的约束模型。
[0055][0056]
由于误差的存在,上述方程不能够精确相等,构建约束模型的法方程如下:
[0057][0058]
其中vi为校正后约束方程的残差,下标为序数。实施例中9组图像单元间形成12组重叠区域约束关系,构成24条独立约束方程,超过待求解校正参数数量。
[0059]
令
[0060][0061]
通过最小二乘平差方法最小化v
t
v的值,求解各图像单元的线性校正参数kj,bj。
[0062]
最后,利用求得的校正参数,校正图像。遍历图像单元,按照下式使用校正参数校正图像。得到最终的校正后图像。
[0063]fj
(x,y)=kj*gj(x,y)+bj[0064]
其中x为图像横坐标,y为图像纵坐标;fj(x,y)为第j个图像单元校正后横坐标为x、纵坐标为y处的像素的灰度值,gj(x,y)则为第j个图像像素校正前横坐标为x、纵坐标为y处的灰度值,kj为第j个图像单元的偏置参数,bj为第j个图像单元的增益参数。
[0065]
一种拼接式航摄相机自适应辐射一致性校正方法流程如图2所示,通过计算拼接式相机各个探测器获取图像重叠区域对应的图像亮度与灰度动态范围的统计指标;选择参考图像单元;采用最小二乘方法解算各块探测器校正参数,具有很好的亮度一致性校正效果,易于投入生产应用。
[0066]
实施例2:
[0067]
一种拼接式相机自适应辐射一致性校正方法,拼接式相机拍摄的一景影像包括多个探测器获取的图像单元,校正方法包括:
[0068]
选取参考图像单元;
[0069]
获取所有两两相邻图像单元间的约束区域,并确定约束区域的统计参数;
[0070]
采用线性校正模型,线性校正模型中含有校正参数,根据两两相邻图像单元间的约束条件,建立含有校正参数的约束模型;基于参考图像单元,利用所述统计参数,求解得到校正参数;
[0071]
利用校正参数,对多个探测器获取的图像单元进行校正。
[0072]
优选的,选取参考图像单元的方法为:在多个探测器获取的图像单元中,将方差最大的图像单元作为参考图像单元。
[0073]
优选的,所述统计参数至少包括均值和方差。
[0074]
优选的,所述线性校正模型为:
[0075]fj
(x,y)=kj*gj(x,y)+bj[0076]
其中x为图像横坐标,y为图像纵坐标;fj(x,y)为第j个图像单元校正后横坐标为x、纵坐标为y处的像素的灰度值,gj(x,y)则为第j个图像像素校正前横坐标为x、纵坐标为y处的灰度值,kj为第j个图像单元的偏置参数,bj为第j个图像单元的增益参数。
[0077]
优选的,将所有相邻的图像单元全部引入约束条件,采用最小二乘法优化求解得到校正参数。
[0078]
优选的,在确定统计参数前,对约束区域进行滤波去噪。
[0079]
优选的,采用线性校正模型,根据两两相邻图像单元间的约束条件,获得两两相邻图像单元间的约束方程,即为含有校正参数的约束模型,将含有校正参数的约束模型转换为法方程,基于参考图像单元,利用所述统计参数,求解得到校正参数。
[0080]
优选的,所述两两相邻图像单元间的约束条件具体为两两相邻图像单元间的统计参数相同。
[0081]
一种拼接式相机自适应辐射一致性校正参数确定方法,拼接式相机拍摄的一景影像包括多个探测器获取的图像单元,校正参数确定方法包括:
[0082]
选取参考图像单元;
[0083]
获取所有两两相邻图像单元间的约束区域,并确定约束区域的统计参数;
[0084]
采用线性校正模型,线性校正模型中含有校正参数,根据两两相邻图像单元间的约束条件,建立含有校正参数的约束模型;基于参考图像单元,利用所述统计参数,求解得到校正参数。
[0085]
一种拼接式相机自适应辐射一致性校正装置,包括:
[0086]
获取模块,用于获取拼接式相机拍摄的一景影像,该影像包括多个探测器获取的图像单元;
[0087]
选取模块,用于选取参考图像单元;
[0088]
第一处理模块,用于获取所有两两相邻图像单元间的约束区域,并确定约束区域的统计参数;
[0089]
第二处理模块,采用线性校正模型,线性校正模型中含有校正参数,根据两两相邻
图像单元间的约束条件,建立含有校正参数的约束模型;基于参考图像单元,利用所述统计参数,求解得到校正参数;
[0090]
校正模块,利用校正参数,对多个探测器获取的图像单元进行校正。
[0091]
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
[0092]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1