车辆进出港检测方法、装置、设备和存储介质与流程
本发明涉及物流,具体涉及一种车辆进出港检测方法、装置、设备和存储介质。
背景技术:
1、在物流中转场中,有很多用于货车装货或者卸货的卡位,为了提升中转场的运行效率,需要管理人员进行车辆到离港检测。
2、通常情况下在装卸货卡位都会安装监控摄像头,因此可以基于计算机视觉技术来进行车辆到离港检测。现有的基于计算机视觉技术的车辆到离港检测方案,通过目标识别技术检测监控视频图像中是否存在车厢,通过定性分析来对车辆到离港进行检测,但是由于车辆行驶过程中容易被遮挡,使得采集到的视频图像中检测不到车厢,造成检测结果的不准确。
技术实现思路
1、本发明实施例提供一种车辆进出港检测方法、装置、设备和存储介质,以提高现有基于计算机视觉技术的车辆到离港检测方案的准确性。
2、一方面,本技术实施例提供一种车辆进出港检测方法,所述方法包括:
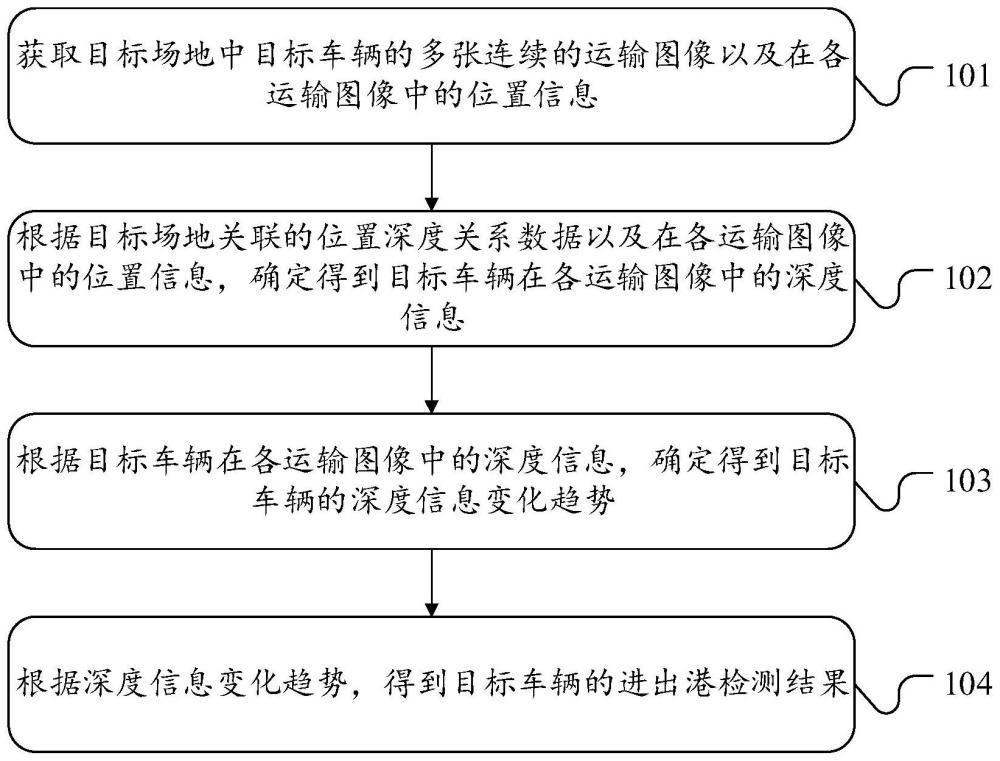
3、获取目标场地中目标车辆的多张连续的运输图像以及在各所述运输图像中的位置信息;
4、根据所述目标场地关联的位置深度关系数据以及在各所述运输图像中的位置信息,确定得到所述目标车辆在各所述运输图像中的深度信息;所述位置深度关系数据包括所述目标场地中每个位置信息以及该位置信息对应的深度信息;
5、根据所述目标车辆在各所述运输图像中的深度信息,确定得到所述目标车辆的深度信息变化趋势;
6、根据所述深度信息变化趋势,得到所述目标车辆的进出港检测结果。
7、在本技术一些实施例中,所述根据所述目标场地关联的位置深度关系数据以及在各所述运输图像中的位置信息,确定得到所述目标车辆在各所述运输图像中的深度信息步骤之前,所述方法包括:
8、采集所述目标场地对应的目标图像;所述目标图像为所述目标场地中未存在车辆;
9、通过已训练的深度估计网络对所述目标图像进行深度估计,得到所述目标图像中各像素点对应的深度信息;
10、获取各所述像素点在所述目标图像中的位置信息,将各所述像素点的位置信息与各所述像素点对应的深度信息关联,得到位置深度关系数据,将所述位置深度关系数据与所述目标场地的场地标识关联。
11、在本技术一些实施例中,所述通过已训练的深度估计网络对所述目标图像进行深度估计,得到所述目标图像中各像素点对应的深度信息步骤之前,所述方法包括:
12、在所述目标场地中设置多个测试点,获取各所述测试点到相机之间的真实距离;
13、采集设置多个测试点之后的目标场地对应的样本图像,将所述样本图像输入预训练的深度估计网络,得到所述样本图像中各所述测试点对应的测试深度值;
14、若各所述测试点对应的测试深度值与所述真实距离之间的误差小于或等于预设误差阈值,则将所述预训练的深度估计网络设置为已训练的深度估计网络;
15、若各所述测试点对应的测试深度值与所述真实距离之间的误差大于预设误差阈值,则根据所述测试深度值与所述真实距离的训练损失值调整所述预训练的深度估计网络的参数,直至各所述测试点对应的测试深度值与所述真实距离之间的误差小于或等于所述预设误差阈值,得到已训练的深度估计网络。
16、在本技术一些实施例中,所述根据所述目标车辆在各所述运输图像中的深度信息,确定得到所述目标车辆的深度信息变化趋势
17、根据各所述运输图像的时间顺序,对各所述运输图像进行排序,得到排序后的运输图像以及所述目标车辆在排序后的运输图像中的深度信息;
18、将所述目标车辆在排序后的运输图像中的深度信息与预设距离阈值进行比较,得到所述目标车辆的深度信息变化趋势。
19、在本技术一些实施例中,所述将所述目标车辆在排序后的运输图像中的深度信息与预设距离阈值进行比较,得到所述目标车辆的深度信息变化趋势包括:
20、将所述目标车辆在排序后的运输图像中的深度信息与预设距离阈值进行作差,得到差值序列;
21、根据所述差值序列得到所述目标车辆的深度信息变化趋势。
22、在本技术一些实施例中,所述根据所述差值序列得到所述目标车辆的深度信息变化趋势之后,所述方法包括:
23、若所述深度信息变化趋势为递减,且所述差值序列中小于或等于预设差值阈值的时间段大于预设时间,则所述目标车辆的进出港检测结果为进港;
24、若所述深度信息变化趋势为递增,且所述目标车辆在各所述运输图像中的深度信息中存在大于预设值的目标深度信息,则所述目标车辆的进出港检测结果为出港。
25、在本技术一些实施例中,所述获取在目标场地中针对目标车辆的多张连续的运输图像以及在各所述运输图像中的位置信息包括:
26、获取目标场地的视频图像,对所述视频图像中每一帧图像进行车辆检测,提取所述视频图像中包含目标车辆的连续帧图像,将所述视频图像中包含目标车辆的连续帧图像设置为所述目标车辆在所述目标场地中的多张连续的运输图像;
27、对各所述运输图像进行目标检测,得到各所述运输图像中所述目标车辆的边界框坐标;
28、根据所述目标车辆的边界框坐标计算所述目标车辆的边界框的中点坐标,将所述目标车辆的边界框的中点坐标设置为所述目标车辆在所述目标场地中的所述多张连续的运输图像的位置信息。
29、在本技术一些实施例中,所述获取目标场地的视频图像,对所述视频图像中每一帧图像进行车辆检测,提取所述视频图像中包含目标车辆的连续帧图像包括:
30、获取目标场地的视频图像,对所述视频图像中每一帧图像进行车辆检测得到每一帧图像中目标车辆的检测结果;
31、以存在所述目标车辆的帧图像为起始帧,提取所述视频图像中包含所述目标车辆的连续帧图像。
32、另一方面,本技术实施例提供一种车辆进出港检测装置,所述装置包括:
33、车辆检测模块,用于获取目标场地中目标车辆的多张连续的运输图像以及在各所述运输图像中的位置信息;
34、深度确定模块,用于据所述目标场地关联的位置深度关系数据以及在各所述运输图像中的位置信息,确定得到所述目标车辆在各所述运输图像中的深度信息;所述位置深度关系数据包括所述目标场地中每个位置信息以及该位置信息对应的深度信息;
35、深度趋势确定模块,用于根据所述目标车辆在各所述运输图像中的深度信息,确定得到所述目标车辆的深度信息变化趋势;
36、检测模块,用于根据所述深度信息变化趋势,得到所述目标车辆的进出港检测结果。
37、另一方面,本技术实施例提供一种车辆进出港检测设备,包括存储器和处理器;所述存储器存储有应用程序,所述处理器用于运行所述存储器内的应用程序,以执行所述的车辆进出港检测方法中的操作。
38、另一方面,本技术实施例提供一种存储介质,所述存储介质存储有多条指令,所述指令适于处理器进行加载,以执行所述的车辆进出港检测方法中的步骤。
39、本发明实施例获取在目标场地中针对目标车辆的多张连续的运输图像以及在各所述运输图像中的位置信息;根据所述目标场地关联的位置深度关系数据以及在各所述运输图像中的位置信息,确定得到所述目标车辆在各所述运输图像中的深度信息;根据所述目标车辆在各所述运输图像中的深度信息,确定得到所述目标车辆的深度信息变化趋势;根据所述深度信息变化趋势,得到所述目标车辆的进出港检测结果;如此,通过目标车辆在目标场地的深度信息变化趋势确定目标车辆的进出港检测结果,将到进出港检测由通过车厢检测的定性分析修改为通过深度变化趋势的定量计算,提高进出港检测的准确性。
- 还没有人留言评论。精彩留言会获得点赞!