一种考虑实际多约束的多条等效最优路径规划方法
c,suganthan p n,liang j,et al.(2021)differential evolution using improved crowding distance for multi-modal multi-objective optimization.swarm and evolutionary computation,62(9):100849.)。这些算法在一定程度上解决了城市物流配送的问题,但在对考虑实际多约束的城市物流进行物流配送时,依然无法同时满足不同决策者对车辆路径的规划需求。
技术实现要素:
6.为了更加实际地反映车辆路径问题,同时满足不同决策者对车辆路径的规划需求,寻求多条等效最优路径,本发明提供了一种考虑实际多约束的多条等效最优路径规划方法,通过考虑更加符合实际的复杂路网约束、负载约束、时间窗约束、需求可拆分约束四种约束下的面向实际多约束的vrp(rich vrp,rvrp),并将其视为一个多模态多目标优化问题,采用改进差分进化算法实现城市物流配送的多条等效最优路径规划。
7.一种考虑实际多约束的多条等效最优路径规划方法,所述方法包括:
8.考虑符合实际的多约束条件并构造对应的目标函数;所述多约束条件包括复杂路网约束、负载约束、时间窗约束、需求可拆分约束;
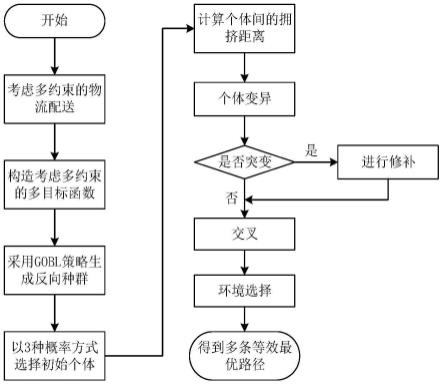
9.采用改进差分进化算法eidsde求解得到物流配送的多条等效最优路径规划,所述改进差分进化算法eidsde在种群初始化阶段引入广义反向学习策略约束种群的搜索空间;在个体选择阶段,以三种概率方式在种群中选择生成差分向量的个体,并对被选择的所有个体进行拥挤距离和特殊拥挤距离的计算,同时将拥挤距离的计算方式转换为相邻欧氏距离的加权和;在变异阶段,若变异产生的个体不满足边界条件,则进行二次变异,若二次变异的个体仍不满足边界条件,则按照预设修补策略进行修补使其满足边界条件;在环境选择阶段,选择预定百分比的前级个体;所述种群中的每个个体代表物流配送的一条可能的路径。
10.可选的,所述复杂路网约束指交通要素以及城市路网拓扑结构产生的约束;所述负载约束指车辆在进行装货时不得超过车辆的最大负载;所述时间窗约束指物流配送的时间上下线;所述需求可拆分约束指配送货物是否可被拆分的约束。
11.可选的,所述方法考虑4种约束下所构造对应的目标函数分别为:
12.f1车辆数:
13.f2总距离:
14.f3总配送时间:
15.f4总配送成本:
16.其中,r为完成配送任务所需的车辆数,qi为顾客i的需求量,w为车辆最大运载能力,n表示顾客的数量,表示向上取整;
17.d
ij
为顾客点i到顾客点j的配送距离,表示第r条路线中车辆是否通过弧(i,j),
为决策变量,当且仅当第r条路线中车辆通过弧(i,j)时,否则否则表示每个顾客至少被访问1次,c={0,1,2,...,n}表配送中心和顾客的集合,c'=c/{c0}表n个顾客的集合;
18.tdj为车辆在顾客j处的等待时间,v表示配送车辆的速度,β为违反顾客所规定的配送时间而产生的时间成本系数,表示配送任务是否有时间要求,b
ir
表示车辆r到达顾客i处的实际时间,b
or
=0表示车辆出发时刻为0,lti表示允许配送车辆到达顾客i处的最晚时间;
19.fy为费用矩阵,每条路径a
ij
∈a对应的费用fy
ij
∈fy,g为车辆的固定成本,l为时间延迟成本,α为单位距离对应的时间延迟成本,sr表示第r条路线中服务的顾客集合,即第r辆车负责配送的顾客集合,|sr|表示集合中包含的元素个数,即顾客个数,(xi,yi)表示顾客i的坐标。
20.可选的,所述方法中,每个个体代表物流配送的一条可能的路径,对应至种群中,每个个体对应一个点,每个点的维度表示该路径所经过的客户数;所述在种群初始化阶段引入广义反向学习策略约束种群的搜索空间包括:
21.假设p为候选解,表示一条可能的路径,假设p=(z1,z2,...,zd)为一个d维空间的点,其中z1,z2,...,zd∈r且zm∈[lm,um],f(
·
)为候选解的目标函数适应值,则p的反向点为其中k=random(0,1),若则若则表示比p具有更好的适应值,此时选择代替p,否则保持不变。
[0022]
可选的,所述方法在个体选择阶段,以三种概率方式在种群中选择生成差分向量的个体,包括:
[0023]
第一种概率方式p1:p1=1-(g
c-1)/max_gen,以超过0.5的概率随机选择整个种群中的五个邻域作为
[0024]
第二种概率方式p2:p2=(1-p1)/2,在决策空间中选择邻域时,根据当前个体与种群中剩余解之间的平均欧氏距离,选择确定数量的邻域,然后从该确定数量的邻域内随机选择5个neighbors,选择拥挤距离最大的一个作为其余的四个为
[0025]
第三种概率方式p3:p3=1-p
1-p2,在目标空间中选择邻域时,根据当前个体与种群中剩余解之间的平均欧氏距离,选择确定数量的邻域,然后从该确定数量的邻域内随机选择5个neighbors,然后选择拥挤距离最大的一个作为其余的四个为
[0026]
其中,gc表示当前迭代的代数,max_gen表示最大迭代次数;
[0027]
在差分进化算法中嵌入基于欧几里德距离的小生境方法,根据决策空间或目标空间中相应个体的拥挤距离,在相应个体的邻域中选择r1,r2,r3,r4,r5。
[0028]
可选的,所述方法在变异阶段,对突变的个体进行合法化处理,包括:
[0029]
采用de/rand/2进行变异,差分向量生成为:其中,vi表示差分向量,r1,r2,r3,r4,r5为相互不等的整数;f是用于缩放差分向量的比例因子;
[0030]
若变异产生的个体不满足边界条件,则:
[0031]
计算首次越界个体与其他变异完成个体之间的平均欧式距离d
avg
;
[0032]
在解空间内取距首次越界个体欧式距离为d
avg
的个体x';
[0033]
将个体x'按照v
i,m
=x
r1,m-f[(x
r2,m-x
r3,m
)+(x
r4,m-x
r5,m
)]进行二次变异;如果经过第二次变异后个体仍然越界,则按照进行修补;其中,v
i,m
表示i
th
个个体在m
th
维上的值,um和lm表示决策空间的上下界。
[0034]
可选的,所述方法在环境选择阶段,选择预定百分比的前级个体,包括:
[0035]
按照进行迭代,其中,gc为当前遗传代数,max_gen为最大遗传代数;
[0036]
当遗传代数为1时,前排选择比率为r(0<r<1),当遗传代数为g*max_gen(1<g*max_gen<max_gen)时,比率为1。
[0037]
可选的,所述缩放差分向量的比例因子f随迭代次数的增加,逐渐减小。
[0038]
本技术还提供一种车辆调度方法,所述方法根据上述考虑实际多约束的多条等效最优路径规划方法确定车辆调度方案。
[0039]
本技术还提供上述考虑实际多约束的多条等效最优路径规划方法在物流配送领域内的应用。
[0040]
本发明有益效果是:
[0041]
(1)本发明通过考虑车辆负载约束、复杂路网约束、时间窗约束、需求可拆分约束四种约束下的物流配送,寻求多条等效最优路径,将rvrp视为一个多模态多目标优化问题。
[0042]
(2)提出一种改进差分进化算法,首先,在初始化过程中利用广义反向学习(gobl)策略生成反向顾客种群,采用转换搜索空间技术把当前空间的解转换到一个新的空间去,即在求解过程中,不但要考虑当前空间的候选解,而且还要考虑转换空间的候选解.由于同时搜索当前空间和转换空间的解,gobl能够很快地发现最优解;本技术在当前空间和变换空间中生成差分向量顾客个体,对被选择的所有个体进行拥挤距离和特殊拥挤距离的计算,同时将拥挤距离的计算方式转换为相邻欧氏距离的加权和,采用三种概率方式在种群中选择生成差分向量的个体,能够使个体的探索能力和开发能力得到自适应平衡,提高决策空间和目标空间的多样性;然后,对产生突变的个体进行合法化处理,并对处理后的所有个体做排序处理,而非直接丢弃,从而使得超出解空间范围的个体能够得到修正,保证个体的多样性,进一步保证了可以得到多条等效最优路径;然后,被排序的个体按照一定的比率被自适应地选择;最终得到多条等效最优路径。
附图说明
[0043]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使
用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0044]
图1是本发明一个实施例中提供的改进差分进化算法的流程图。
具体实施方式
[0045]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地详细描述。
[0046]
首先对本技术涉及的基础理论进行介绍如下:
[0047]
1、差分进化算法运行步骤包括:
[0048]
(1)初始化
[0049]
设d为个体的维数,np为种群规模,t为进化代数,x(t)为第t代种群;
[0050]
首先,在问题的决策空间内随机产生第0代种群(也即初始种群):x(0)={x1(0),x2(0),...,x
np
(0)},其中,xi(t)=(x
i,1
(t),x
i,2
(t),...,x
i,d
(t))用于表征第t代种群中第i个个体。
[0051]
个体每一维上的取值可按x
i,m
(0)=lm+rand
i,m
[0,1](u
m-lm)产生,其中:1≤i≤np,1≤m≤d,[lm,um]为第m维上的取值范围,rand
i,m
[0,1]为介于0到1之间的一个均匀分布随机数。
[0052]
(2)变异
[0053]
从生物角度看,变异意味着染色体中的基因顺序发生改变。在进化计算领域里,变异被看作是某个元素发生改变。在差分进化算法中,以最简单的变异操作(de/rand/1)为例,针对i
th
个基准向量的变异操作是:从当前种群中随机选择三个向量x
r1
(t),x
r2
(t),x
r3
(t)。要求r1,r2,r3是从集合{1,2,...,np}\{i}中随机选择的相互不同的整数,其中两个向量的差值进行缩放,并与第三个向量相加得到一个变异向量vi(t):vi(t)=x
r1
(t)+f(x
r2
(t)-x
r3
(t)),其中f为de的缩放因子,取值范围为[0,1]。
[0054]
显然,x
r2
(t)和x
r3
(t)之间的差分向量越小,扰动也就越小。这就意味着,在算法的初始阶段,由于个体彼此相差较大,扰动较大,算法在比较大的范围进行搜索,在算法的后期,因为群体都靠近最优个体,扰动值偏小,算法在小范围的内进行搜索。
[0055]
(3)交叉
[0056]
为了提高种群的多样性,差分进化算法引入了离散杂交算子。与其他进化算法中基于多个来自父代中的基准向量交换基因的杂交算子不同的是,差分进化算法中的杂交算子采用基准向量和变异向量进行操作。
[0057]
(4)选择
[0058]
差分进化算法的选择操作是一种基于贪婪的选择机制,是在目标向量和其对应的试验向量两者中保留最优,使得子代个体的适应度值总是好于父代个体的适应度值,从而导致种群始终向最优解的位置进化,并逐步聚焦到最优解位置或满意解位置。
[0059]
实施例一:
[0060]
本实施例提供一种考虑实际多约束的多条等效最优路径规划方法,参见图1,所述方法包括:
[0061]
(1)考虑符合实际的多约束条件
[0062]
对于城市物流配送考虑更加符合实际的复杂路网约束、负载约束、时间窗约束、需求可拆分约束,考虑多目标优化问题;
[0063]
负载约束:车辆在进行装货时不得超过车辆的最大负载;
[0064]
复杂路网约束:路网复杂性主要表现在细致复杂的交通要素和复杂的拓扑结构两方面,复杂的交通要素主要包括红绿灯、事故、高峰时段等,以及城市道路交叉口和道路路段的限制;复杂的城市路网拓扑结构主要体现在两点间的连接路径包括多条选择;
[0065]
时间窗约束:时间窗的限定表明了顾客可以接受配送服务的上下界限,早于或者晚于这个界限需要付出一定的送惩罚成本,与实际的配业务场景更为符合;
[0066]
需求可拆分约束:配送中心在对顾客点进行订单配送时,如果顾客的需求允许被拆分配送,则无论是从车辆的行驶距离还是所使用车辆的数量上看,都优于顾客需求只能被一辆车服务一次的情况。
[0067]
(2)构造目标函数,即考虑四种约束下的多目标函数;
[0068]
f1车辆数:
[0069]
f2总距离:
[0070]
f3总配送时间:
[0071]
f4总配送成本:
[0072]
其中,g为车辆的固定成本,l为时间延迟成本,
[0073]
n为顾客的数量,(xi,yi)表示顾客i的坐标,r为完成配送任务所需的车辆数,因为实际配送中,一条配送路径需要一辆车,因此r∈r,表示向上取整,w为车辆最大运载能力,qi为顾客i的需求量。
[0074]dij
为顾客点i到顾客点j的配送距离,表示每个顾客至少被访问1次,c={0,1,2,...,n}表配送中心和顾客的集合,c'=c/{c0}表n个顾客的集合。
[0075]
α为单位距离对应的时间延迟成本,β为违反顾客所规定的配送时间而产生的时间成本系数。
[0076]
tdj为车辆在顾客j处的等待时间,b
ir
表示车辆r到达顾客i处的实际时间,lti表示允许配送车辆到达顾客i处的最晚时间,b
or
=0表示车辆出发时刻为0,v表示配送车辆的速度。
[0077]
sr表示第r条路线中服务的顾客集合,即第r辆车负责配送的顾客集合,|sr|表示集合中包含的元素个数,即顾客个数。
[0078]
表示配送任务是否有时间要求。
[0079]
fy为费用矩阵,每条路径a
ij
∈a对应的费用fy
ij
∈fy,
[0080]
为决策变量,当且仅当第r条路线中车辆通过弧(i,j)时,否则
[0081]
(3)基于广义反向学习的种群生成
[0082]
在进化算法的初始化过程中引入广义反向学习(generalized opposition-based learning,gobl)策略,约束种群的搜索空间,加快算法收敛速度和效率:
[0083]
假设p=(z1,z2,...,zd)为一个d维空间的点(假设p为候选解),其中z1,z2,...,zd∈r且zm∈[lm,um],f(
·
)为候选解的目标函数适应值,则p的反向点为其中k=random(0,1),若则若则表示比p具有更好的适应值,此时选择代替p,否则保持不变。
[0084]
(4)初始化个体选择
[0085]
为了使个体的探索能力和开发能力得到自适应平衡,提高决策空间和目标空间的多样性,使用三种概率方式在种群中选择生成差分向量的个体,并计算个体之间的拥挤距离;
[0086]
使用三种概率方式在种群中选择生成差分向量的个体:
[0087]
①
p1:p1=1-(g
c-1)/max_gen,以超过较高概率随机选择整个种群中的五个邻域作为实际应用中,可以超过0.5的概率进行随机选择。
[0088]
②
p2:p2=(1-p1)/2,在决策空间中选择邻域时,根据当前个体与种群中剩余解之间的平均欧氏距离,选择一定数量的邻域(此邻域大小根据种群规模进行确定,该案例中邻域大小设置为12),然后从该确定数量的邻域内随机选择5个neighbors,然后选择拥挤距离最大的一个作为其余的四个为
[0089]
③
p3:p3=1-p
1-p2,在目标空间中选择邻域时,根据当前个体与种群中剩余解之间的平均欧氏距离,选择一定数量的邻域(该处“一定数量的邻域”含义同样根据种群规模进行确定,该案例中邻域大小设置为12),然后从该确定数量的邻域内随机选择5个neighbors,然后选择拥挤距离最大的一个作为其余的四个为
[0090]
其中,gc表示当前迭代的代数,max_gen表示最大迭代次数。
[0091]
在差分进化算法中嵌入基于欧几里德距离的小生境方法,根据决策空间或目标空间中相应个体的拥挤距离,在相应个体的邻域中选择r1,r2,r3,r4,r5。
[0092]
(5)变异及合法化处理
[0093]
采用de/rand/2进行变异,差分向量生成为:其中,vi表示差分向量,r1,r2,r3,r4,r5为相互不等的整数。f是用于缩放差分向量的比例因子。变异后的向量个体可能是不可行的,即变异产生的个体不满足边界条件,直接超出解空间范围,也就是落在搜索空间以外,因此需要对不可行解进行合法化处理。
[0094]
(5.1)计算首次越界个体与其他变异完成个体之间的平均欧式距离d
avg
;
[0095]
(5.2)在解空间内取距首次越界个体欧式距离为d
avg
的个体x';
[0096]
(5.3)将个体x'按照v
i,m
=x
r1,m-f[(x
r2,m-x
r3,m
)+(x
r4,m-x
r5,m
)]进行二次变异;
[0097]
如果经过第二次变异后个体仍然越界,则按照进行修补;
[0098]
其中,v
i,m
表示i
th
个个体在m
th
维上的值,um和lm表示决策空间的上下界。
[0099]
(6)个体交叉
[0100]
(7)环境选择操作
[0101]
在新的环境选择方法中,只选择一定百分比的前级元素。
[0102]
对所选个体的比例按照进行迭代,其中,gc为当前遗传代数,max_gen为最大遗传代数。当遗传代数为1时,前排选择比率为r(0<r<1),当遗传代数为g*max_gen(1<g*max_gen<max_gen)时,比率为1。
[0103]
经过初始化、变异、交叉、环境选择后,得到城市物流配送的多条等效最优路径。
[0104]
本发明的效果可通过以下仿真实验进一步说明。
[0105]
1.仿真条件
[0106]
本实施例利用matlab 2020a进行仿真实验,实验设备为具有i7-7500 2.90ghz cpu的电脑。由于solomon数据集(solomon数据集是一个公开的数据集)不能代表本发明所提出的rvrp的理想基准场景,而在本发明所提出的rvrp中时间窗约束具有一定的主导地位,因此本发明使用了与zhou and wang(zhou y,wang j.a local search-based multi-objective optimization algorithm for multi-objective vehicle routing problem with time windows(2017).ieee systems journal,9(3):1100-1113.)以及castro gutierrez et al.(jpc guti
é
rrez,landa-silva d,ja moreno-p
é
rez.nature of real-world multi-objective vehicle routing with evolutionary algorithms(2011).ieee international conference on systems.ieee,257-264.)相同的测试数据集。该数据集由45个真实vrp数据实例构成,这些数据由3种不同规模的顾客、5种时间窗配置和3种不同容量的车型组成,即3个群体*5种时间窗*3种车辆容量=45个vrp实例,此数据集和配置文件可从https://github.com/psxjpc/下载。
[0107]
本实施例将本技术方法eidsde和现有的insga_ii和mmode_icd进行了对比,这两种方法可参考:
[0108]
insga_ii可参考“srivastava g,singh a,mallipeddi r.nsga-ii with objective-specific variation operators for multi-objective vehicle routing problem with time windows[j].expert systems with applications,2021,176:114779.”[0109]
mmode_icd可参考“yue c,suganthan p n,liang j,et al.differential evolution using improved crowding distance for multi-modal multi-objective optimization[j].swarm and evolutionary computation,2021,62(9):100849.”[0110]
2.仿真结果
[0111]
单一的性能指标不能全面衡量多目标优化算法的性能,因此,本发明使用了四个
度量:
[0112]
(1)反向世代距离(inverted generational distance,igd):igd值越小,表明非占优解集越逼近真实pareto前沿并且分布更均匀,解集的收敛性和多样性更好。
[0113]
(2)覆盖度量(coverage metric,c-metric):其值用c(x,y)计算,c(x,y)表示解集y中有多少比例的解被解集x中的某解支配。
[0114]
(3)1/hv:hv(hyper volume)为超容量,1/hv可以在决策空间中度量性能,值越小性能越好。
[0115]
(4)1/psp:psp为pareto集接近度(pareto sets proximity,psp),psp反映了真实ps和获得的ps之间的重叠率和距离,1/psp可以在目标空间中度量性能,值越小性能越好。
[0116]“数1-数2-数3”表示实例的名称,其中,数1表示顾客数量,数2表示关于车辆容量不同类型指数,数3表示时间窗配置的索引。
‘
b/s/w’表示所提出算法的效果明显优于/基本相似/明显劣于当前算法。
[0117]
下述表1和表2中,简写含义如下:
[0118]
c(in,ei):c(insga-ii,eidsde)
[0119]
c(ei,in):c(eidsde,insga-ii)
[0120]
c(mm,ei):c(mmode_icd,eidsde)
[0121]
c(ei,mm):c(eidsde,mmode_icd)
[0122]
表1 eidsde和insga_ii四个指标平均值对比
[0123][0124]
表2 eidsde和mmode_icd四个指标平均值对比
[0125][0126]
从表1和表2可以看出:
[0127]
就igd而言,本技术方法eidsde在所有45个实例中的值明显小于insga_ii,在32个实例上的值小于mmode_icd,而igd值越小表明非占优解集越逼近真实pareto前沿并且分布更均匀,解集的收敛性和多样性更好。
[0128]
就c-metric而言,本技术方法eidsde在30个实例上的值中明显优于insga_ii,在28个实例上的值明显优于mmode_icd。
[0129]
就1/hv和1/psp而言,本技术方法eidsde也表现出来较好的效果。
[0130]
从表1和表2可以显而易见地看出,问题的难度随着顾客数量的增加和车辆容量的减少而增加。原因在于,拥有更多顾客和更小容量车辆的问题将有更多的路径规划解决方案,因此,在所有目标上趋同将更加困难。而且,在任何一个目标中具有最小值的任何解都是非支配解,而与其他目标的值无关。
[0131]
在现实场景中,与其他目标相比,对一个目标的偏好可能更高。在本发明所提出的具有4个目标的rvrp中,从某种角度来看,目标f2(总行驶距离)可能比其他目标更重要,因为行驶距离与燃油消耗量成正比,因此,它对环境污染有直接影响。此外,对于物流公司而言,目标f4(总成本)和f3(总行驶时间)同等重要,因为既要保证在规定时间内对顾客进行服务,提高顾客满意度,又要保证在整个物流配送过程降低配送总成本。因此,通过一种方法在所有目标中找到最优值对于rvrp是至关重要的,因为在大多数情况下,决策者的偏好是
[0147]0→5→8→
13
→
16
→
22
→
29
→
32
→
40
→
43
→
46
→0[0148]
或
[0149]0→1→9→
14
→
17
→
23
→
28
→
35
→
39
→
44
→
47
→0[0150]0→2→6→
12
→
18
→
24
→
27
→
33
→
38
→
42
→
48
→0[0151]0→3→7→
11
→
20
→
25
→
29
→
31
→
36
→
45
→
50
→0[0152]0→4→8→
13
→
16
→
22
→
30
→
34
→
37
→
41
→
49
→0[0153]0→5→
10
→
15
→
19
→
21
→
26
→
32
→
40
→
43
→
46
→0[0154]
等效最优路径下所需最小车辆数为5辆,最短路径长度为264.36千米,最小成本费用为9866.65元,最短总行程时间为4.41小时(不包括车辆的服务时间)。上述分别为所需的5辆车的路径,其中数字代表顾客节点。
[0155]
采用mmode_icd获得的唯一路径为:
[0156]0→1→7→
10
→
15
→
25
→
33
→
38
→
45
→
49
→0[0157]0→2→
11
→
14
→
20
→
26
→
30
→
34
→
41
→0[0158]0→3→6→
12
→
18
→
23
→
31
→
37
→
42
→
48
→0[0159]0→4→8→
13
→
21
→
27
→
35
→
40
→
44
→0[0160]0→5→
16
→
22
→
29
→
32
→
46
→
39
→
47
→0[0161]0→9→
17
→
19
→
24
→
28
→
36
→
43
→
50
→0[0162]
最优路径所需最小车辆数为6辆,最短路径长度为375.82千米,最小成本费用为122045.64元,最短总行程时间为6.26小时(不包括车辆的服务时间)。
[0163]
采用insga_ii获得的唯一路径为:
[0164]0→1→7→
25
→
33
→
45
→0[0165]0→2→
14
→
26
→
34
→
41
→0[0166]0→3→6→
23
→
31
→
42
→0[0167]0→4→8→
21
→
35
→
44
→0[0168]0→5→
16
→
22
→
32
→
46
→0[0169]0→9→
19
→
24
→
36
→
50
→0[0170]0→
10
→
18
→
28
→
40
→
43
→0[0171]0→
11
→
15
→
30
→
37
→
48
→0[0172]0→
12
→
17
→
27
→
38
→
49
→0[0173]0→
13
→
20
→
29
→
39
→
47
→0[0174]
最优路径所需最小车辆数为10辆,最短路径长度为653.47千米,最小成本费用为23568。76元,最短总行程时间为10.89小时(不包括车辆的服务时间)。
[0175]
实验结果表明,本发明所提出的方法能够满足不同决策者对车辆路径的规划需求,同时满足多目标的同时最优,获得多条等效最优路径,而现有的mmode_icd和insga_ii均只能够获得唯一最优路径,无法同时满足不同决策者对车辆路径的规划需求。
[0176]
本发明实施例中的部分步骤,可以利用软件实现,相应的软件程序可以存储在可读取的存储介质中,如光盘或硬盘等。
[0177]
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1