一种纵弯模态耦合型单自由度超声电机启动性能预测方法
1.本发明涉及超声电机和有限元仿真领域,尤其涉及一种纵弯模态耦合型单自由度超声电机启动性能预测方法。
背景技术:
2.航天是当今世界最具挑战性并且具备广泛带动性的高技术领域之一,我国也在加快航天强国建设步伐,不断拓展空间应用深度和广度。航天器是空间应用的载体,各类航天器上广泛配置多种高精度长寿命空间机构,如激光指向机构(cpa)、控制力矩陀螺(cmg)、激光扫描三维成像机构(lvds)和空间机械臂、天线驱动机构(gda)等,以满足不同应用对精确控制、精准观测、精稳操作的需求。实现空间机构轻量化及快捷精稳运动性能已成为支撑我国航天强国建设亟待提升的基础能力。电机是各类空间机构运动的驱动源,对空间机构的综合性能起着至关重要的作用。与空间机构常用的电磁电机通过电磁力传动不同,超声电机通过压电陶瓷激励定子产生可控的微观振动,并通过定转子摩擦转化为转子宏观转动。基于该工作原理,超声电机在空间机构严格的体积、重量约束范围内,可以充分体现出重量轻、扭矩大、响应快、自锁定等优势,应用于空间机构可更好地实现系统轻量化并显著提升响应特性。
3.现有的电机启动性能检测方式均为对电机实物进行实验检测,没有可靠且有效的有限元仿真分析方法对超声电机启动时间进行分析计算。
4.因此,为了满足空间机构高精度、长寿命、超低速、大速比、往复摆动的典型工况需求,尤其是空间机构的超声电机的往复摆动都是微幅摆动的工况,每一次的工作的时间都很短暂,这样研究超声电机的瞬态响应性能就很有必要。
技术实现要素:
5.本发明所要解决的技术问题是针对背景技术中所涉及到的缺陷,提供一种纵弯模态耦合型单自由度超声电机启动性能预测方法。
6.本发明为解决上述技术问题采用以下技术方案:
7.一种纵弯模态耦合型单自由度超声电机启动性能预测方法,包括如下步骤:
8.步骤1),确定超声电机中定子和转子的几何结构、材料参数;
9.步骤2),划分网格,建立超声电机的有限元仿真模型;
10.步骤3),对超声电机有限元仿真模型设定约束边界条件和接触边界条件;
11.步骤4),对超声电机有限元仿真模型中的压电材料部分进行材料属性设置,确定极化方向、压电常数、介电常数;
12.步骤5),对超声电机进行模态分析,确定超声电机定子工作模态频率大小;
13.步骤6),建立瞬态动力学仿真分析模块,根据超声电机定子工作模态频率设置每个载荷步的计算时间;
14.步骤7),在载荷步设置中定义子步;
15.步骤8),设置电压载荷,以载荷步为基准为每个周期内的载荷步分别设置电压,进行周期循环,得到超声电机转子的转动角度随时间的变化曲线;
16.步骤9),根据超声电机转子的转动角度随时间的变化曲线进行判断,在其曲线斜率开始保持不变的时刻之前的转子处于启动工作的状态,在其曲线斜率开始保持不变的时刻之后的转子处于稳定工作的状态,从而得到推进系统的启动时间。
17.本发明采用以上技术方案与现有技术相比,具有以下技术效果:
18.本发明结合压电驱动模块,使用有限元仿真分析技术,计算双转子超声电机的启动响应时间,方法简单使用可靠;本发明对旋转型超声电机的启动响应性能计算具有普适性,同时也可以对结构优化设计、实验结果预测提供参考和指导,有较大的实用价值。
附图说明
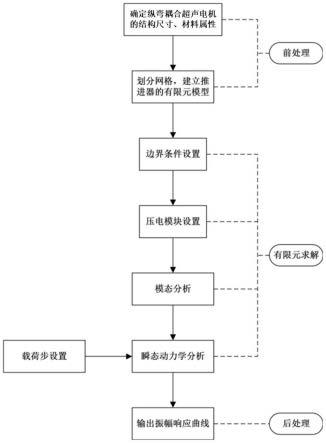
19.图1本发明的方法流程图;
20.图2本发明实施例中样机结构示意图;
21.图3本发明实施例中模态耦合型超声电机有限元分析网格模型和边界条件设置示意图;
22.图4本发明实施例中模态耦合型超声电机定子的模态振型;
23.图5本发明实施例中模态耦合型超声电机压电陶瓷极化方向及电压施加位置示意图;
24.图6本发明实施例模态耦合型超声电机转子启动响应示意图。
具体实施方式
25.下面结合附图对本发明的技术方案做进一步的详细说明:
26.本发明可以以许多不同的形式实现,而不应当认为限于这里所述的实施例。相反,提供这些实施例以便使本公开透彻且完整,并且将向本领域技术人员充分表达本发明的范围。在附图中,为了清楚起见放大了组件。
27.本发明公开了一种纵弯模态耦合型单自由转动超声电机启动性能预测方法,流程如图1所示,具体实施过程如下:
28.步骤1),确定超声电机中定子和转子的几何结构、材料参数;以一种纵弯模态耦合的单自由转动超声电机为例,其结构如图2所示,所述双转子超声电机包括转子、预压缩弹簧和定子,其各种材料参数如下表所示。
29.30.将建立好的仿真分析模型导入有限仿真分析软件(ansys workbench)中,对模型中的零部件定义材料,材料如上表所示。
31.步骤2),划分网格,建立超声电机的有限元仿真模型。根据推进器的尺寸大小确定网格尺寸,网格扭曲度应尽量小于0.5,网格正交质量应尽量大于0.8。网格图如图3所示。
32.步骤3),对超声电机有限元仿真模型设定约束边界条件和接触边界条件;
33.边界条件的设置应该与实际情况相一致。本实施例中超声电机定子为自由状态,转子、定子间通过一组预压缩弹簧链接。接触边界条件中包括预压缩弹簧的刚度和压缩量,转子与定子之间为摩擦接触并设置摩擦系数。
34.步骤4),对超声电机有限元仿真模型中的压电材料部分进行材料属性设置,确定压电常数、介电常数,以及压电陶瓷的极化方向,如图5所示。
35.步骤5),对超声电机进行模态分析,确定超声电机定子工作模态频率大小。
36.步骤6),建立瞬态动力学仿真分析模块,根据超声电机定子工作模态频率设置每个载荷步的计算时间,其模态振型如图4所示。一个周期时间为1/f,将一个周期细分为8个载荷步,则每个载荷步的计算时间为1/8fs。
37.步骤7),在载荷步设置中定义子步,在一个周期内总计算子步数应尽量大于等于20步。本实施例中设置子步数为5,即将每个载荷步又分为5个子步,每个周期内的计算步数为40步。
38.步骤8),设置电压载荷,以载荷步为基准为每个周期内的载荷步分别设置电压,在结构瞬态分析为载荷步添加电压载荷,以载荷步为基准为每个周期内的8个载荷步分别设置电压并周期循环,其中在一周期内按时间依次赋予峰峰值为v的正弦电压载荷,进行瞬态动力学有限元求解,得到超声电机转子的转动角度随时间的变化曲线。
39.步骤9),根据超声电机转子的转动角度随时间的变化曲线进行判断,在其曲线斜率开始保持不变的时刻之前的转子处于启动工作的状态,在其曲线斜率开始保持不变的时刻之后的转子处于稳定工作的状态。
40.读取仿真计算得到超声电机转子的转动角度随时间的变化曲线,如图6所示,认为在曲线斜率开始保持不变的时刻之前的转子处于启动工作的状态,认为在曲线斜率开始保持不变的时刻之后的转子处于稳定工作的状态,从而得到推进系统的启动时间。
41.本技术领域技术人员可以理解的是,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
42.以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1