一种在厨余垃圾内的小目标低像素的识别方法与流程
1.本发明属于图像处理技术领域,特别是涉及一种在厨余垃圾内的小目标低像素的识别方法。
背景技术:
2.深度学习的发展为目标检测技术提供了关键基础,使其已在无人驾驶、视频追踪等领域广泛应用,但仍存在一些缺陷有待改进和完善。由于现有目标检测算法大多是针对具有一定尺寸或比例的大中型目标,而实际场景也存在尺寸小、特征弱的待测小目标,所谓的小目标定义有两种:相对尺寸和绝对尺寸。相对尺寸定义为目标对象占据图像的0.12%以下即为小目标;绝对尺寸定义为目标尺寸小于32
×
32的即为小目标。由于现有算法对小目标检测性能还远不能令人满意。
3.综上所述,多尺度特征融合就是将拥有不同特点的特征图进行结合,使融合后的特征图既有具体的边缘细节信息,也有丰富抽象的语义信息。因其拥有更多的全局信息,而对原图像有更强的表达力和描述力。因此,该方法能有效改善网络模型对小目标检测性能差的问题。
4.但是一些特征融合引入了反卷积操作,这一方式会增加时间成本,降低检测速度。以此同时,特征融合会常常忽略待融合特征图通道间的相互依赖关系,不能反映不同特征通道间的相关性和重要性。
5.所以将小目标检测算法广泛应用于具体实际场景还存在一定挑战。
技术实现要素:
6.本发明的目的在于提供一种在厨余垃圾内的小目标低像素的识别方法,通过对电池以进行采样,通过使用二分类神经网络学习电池的特征,生成电池识别模型。将模型部署在嵌入式开发板后,通过给待识别区域进行等梯度划分,在每个子区域进行识别后,将各自的识别结果通过iou的方式进行融合,得到最终预测结果,解决了现有的垃圾分类场景下的小目标的识别精度低以及硬件消耗大的问题。
7.为解决上述技术问题,本发明是通过以下技术方案实现的:
8.本发明为一种在厨余垃圾内的小目标低像素的识别方法,包括如下步骤:
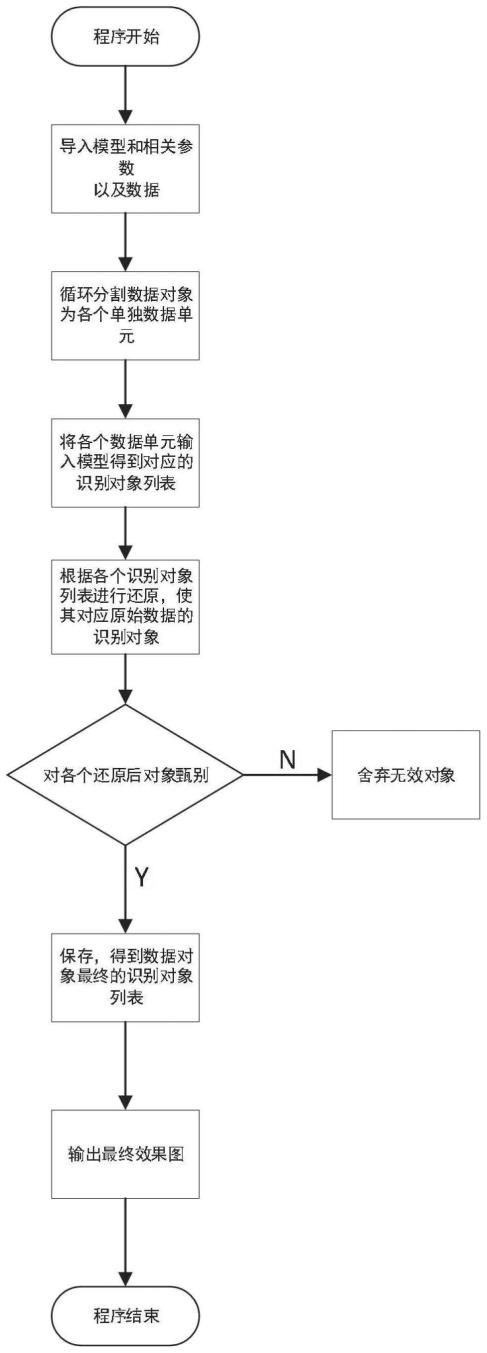
9.步骤s1:导入模型和相关参数以及数据;
10.步骤s2:循环分割数据对象为各个单独数据单元;
11.步骤s3:将各个数据单元输入模型得到对应的识别对象列表;
12.步骤s4:根据各个识别对象列表进行还原,使其对应原始数据的识别对象;
13.步骤s5:对各个还原后对象甄别;
14.步骤s6:保存得到数据对象最终的识别对象列表;
15.步骤s7:输出最终效果图。
16.作为一种优选的技术方案,所述步骤s1中,训练所需的模型具体流程如下:
17.步骤s11:在网上收集大量电池图片;
18.步骤s12:将电池图片通过人工标注为xml文件,并制成数据集;
19.步骤s13:将数据集送到神经网络进行学习,训练生成新模型。
20.步骤s18:后使用循环对粗劣的识别对象列表进行甄别并使用iou设定阈值的方式进行融合,从而得到最终识别数据,保存并以图像形式体现出来。
21.作为一种优选的技术方案,所述步骤s2中,程序开始运行时,导入训练好的模型,读取运行必要参数,输入需要识别的数据,对需识别数据进行甄别。
22.作为一种优选的技术方案,所述步骤s3中,使用循环对原始数据进行单位分割,使其成为各个独立数据对象;再使用循环对各个独立数据对象输入进模型进行识别,从而得到各个独立数据对象对应的识别对象列表。
23.作为一种优选的技术方案,所述步骤s5中,甄别时使用循环对粗劣的识别对象列表进行甄别并使用iou设定阈值的方式进行融合,从而得到最终识别数据,保存并以图像形式体现出来。
24.作为一种优选的技术方案,所述iou计算时,将两个区域重叠的部分除以两个区域的集合部分得出的结果,通过设定的阈值,与这个iou计算结果比较;所述iou计算方式如下:
[0025][0026]
式中,intersection area为两个电池对象区域的重叠部分的面积,union area 为两个电池对象区域的集合部分的面积,从而得到电池对象区域的iou值,使用得到的iou值与预设定的阈值进行比较从而判断电池对象区域的取舍与融合。
[0027]
本发明具有以下有益效果:
[0028]
本发明通过对电池以进行采样,通过使用二分类神经网络学习电池的特征,生成电池识别模型;将模型部署在嵌入式开发板后,通过给待识别区域进行等梯度划分,在每个子区域进行识别后,将各自的识别结果通过 iou的方式进行融合,得到最终预测结果,提高垃圾分类场景下的小目标的识别精度,降低硬件消耗量。
[0029]
当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
[0030]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0031]
图1为本发明的一种在厨余垃圾内的小目标低像素的识别方法流程图;
[0032]
图2为iou计算原理示意图。
具体实施方式
[0033]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0034]
请参阅图1所示,本发明为一种在厨余垃圾内的小目标低像素的识别方法,包括如下步骤:
[0035]
步骤s1:导入模型和相关参数以及数据;
[0036]
具体训练所需的模型具体流程如下:
[0037]
步骤s11:在网上收集大量电池图片;
[0038]
步骤s12:将电池图片通过人工标注为xml文件,并制成数据集;
[0039]
步骤s13:将数据集送到神经网络进行学习,训练生成新模型。
[0040]
步骤s2:循环分割数据对象为各个单独数据单元;
[0041]
程序开始运行时,导入训练好的模型,读取运行必要参数,输入需要识别的数据,对需识别数据进行甄别。
[0042]
步骤s3:将各个数据单元输入模型得到对应的识别对象列表;
[0043]
使用循环对原始数据进行单位分割,使其成为各个独立数据对象;再使用循环对各个独立数据对象输入进模型进行识别,从而得到各个独立数据对象对应的识别对象列表。
[0044]
步骤s4:根据各个识别对象列表进行还原,使其对应原始数据的识别对象;
[0045]
步骤s5:对各个还原后对象甄别;
[0046]
甄别时使用循环对粗劣的识别对象列表进行甄别并使用iou设定阈值的方式进行融合,从而得到最终识别数据,保存并以图像形式体现出来
[0047]
步骤s6:保存得到数据对象最终的识别对象列表;
[0048]
步骤s7:输出最终效果图。
[0049]
步骤s18:后使用循环对粗劣的识别对象列表进行甄别并使用iou设定阈值的方式进行融合,从而得到最终识别数据,保存并以图像形式体现出来。
[0050]
请参阅图2所示,所述iou计算时,将两个区域重叠的部分除以两个区域的集合部分得出的结果,通过设定的阈值,与这个iou计算结果比较;所述iou计算方式如下:
[0051][0052]
式中,intersection area为两个电池对象区域的重叠部分的面积,union area 为两个电池对象区域的集合部分的面积,从而得到电池对象区域的iou值,使用得到的iou值与预设定的阈值进行比较从而判断电池对象区域的取舍与融合。
[0053]
本实施例的一个具体应用为:
[0054]
本技术文件采用硬件环境:显卡为rtx3080、处理器为intel core i9-10980xe以及内存条容量为62.5gib的服务器上搭建pytorch深度学习环境,主要用于识别发现垃圾中纽扣电池。具体实现方法如下:
[0055]
同时在网上收集大量电池图片(包含近距离以及远距离),总共约9185 张。通过人工标注为xml文件,并制作voc2007数据集。
[0056]
将数据集送进pytorch支持下的神经网络进行学习,网络模型为二分类,epoch为
150,batch-size为32,训练图片大小为640*640,学习率为动态调节参数。
[0057]
训练完150个epoch后生成新模型。
[0058]
python程序开始运行,导入训练好的模型,读取运行必要参数。
[0059]
输入需要识别的数据,对需识别数据进行甄别。
[0060]
使用循环对原始数据进行单位分割,使其成为各个独立数据对象。
[0061]
再使用循环对各个独立数据对象输入进模型进行识别,从而得到各个独立数据对象对应的识别对象列表。
[0062]
再使用循环对各个对应的识别对象进行相对原始数据还原,得到一个粗劣的识别对象列表。
[0063]
最后使用循环对粗劣的识别对象列表进行甄别并使用iou设定阈值的方式进行融合,从而得到最终识别数据,保存并以图像形式体现出来。
[0064]
iou计算方式如下:
[0065]
iou原理:iou是两个区域重叠的部分除以两个区域的集合部分得出的结果,通过设定的阈值,与这个iou计算结果比较;
[0066]
iou计算时,将两个区域重叠的部分除以两个区域的集合部分得出的结果,通过设定的阈值,与这个iou计算结果比较;所述iou计算方式如下:
[0067][0068]
式中,intersection area为两个电池对象区域的重叠部分的面积,union area 为两个电池对象区域的集合部分的面积,从而得到电池对象区域的iou值,使用得到的iou值与预设定的阈值进行比较从而判断电池对象区域的取舍与融合。
[0069]
本技术文件采用的新技术可以识别安装高度为800mm,感受野为460*460的海康威视的网络摄像头下的混在厨余垃圾内的小目标电池。
[0070]
值得注意的是,上述系统实施例中,所包括的各个单元只是按照功能逻辑进行划分的,但并不局限于上述的划分,只要能够实现相应的功能即可;另外,各功能单元的具体名称也只是为了便于相互区分,并不用于限制本发明的保护范围。
[0071]
另外,本领域普通技术人员可以理解实现上述各实施例方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,相应的程序可以存储于一计算机可读取存储介质中。
[0072]
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1