一种多跳绳模式识别计数方法与流程
1.本发明涉及ai智能图像识别技术领域,尤其涉及一种多跳绳模式识别计数的方法。
背景技术:
2.目前的ai识别跳绳计数方法中基本都是通过以下几种方式实现,如:1、通过视频抽帧对人体关键点进行目标检测,得到多个人体关键点,利用人体关键点历史数据训练出人体跳绳的参数波形图,再根据参数波形图识别新的视频人体关键点,进而得到跳绳个数;2、通过视频采集抽帧采用特征提取方法获取人体姿态信息,并提取出跳绳计数特征序列,先对跳绳计数进行滤波处理,再对检测到的33个人体关键点特征提取计算二阶差信息后,获得特征序列在时序上的特征规律,基于滤波后的特征序列找到跳绳过程中的波峰波谷,人体姿态特征和跳绳波峰波谷两者比对后,最终获得准确跳绳计数;3、获取跳绳视频,通过人体关键点检测模型检测跳绳视频中第一帧图像中的人体33个关键点,并输出与其对应的骨骼关节图;将每一骨骼关节图中运动关节的坐标设置为第一关键点坐标;获取每一关键肢体部位在跳绳视频中多个第二帧图像中的若干第二关键点坐标,第二关键点坐标的获取包括:通过跟踪算法跟踪前一帧图像获得或者通过人体关键点检测模型获取;将所有第一关键点坐标以及所有第二关键点坐标与每个跳绳动作引起的高度变化进行关联处理,以获得跳绳计数数据;4、通过跳绳手柄确定与跳绳行为相关的状态数据,并在状态数据表征跳绳行为有效的情况下,确定跳绳计数数据。跳绳手柄包括:处理器模组和计数模组。跳绳手柄包括霍尔传感器和加速度计(或陀螺仪)。霍尔传感器负责采集计数数据,加速度计负责检测数据的有效性。当跳绳加速度为零时,本次记录的跳绳行为无效时;5、通过依据霍尔传感器信号筛选出跳绳被测圈的六轴陀螺仪数据,通过数值计算拟合出跳绳被测圈的x、y、z三个方向的正弦曲线,计算跳绳被测圈的正弦曲线与该圈的六轴陀螺仪数据的误差;通过误差来判断跳绳被测圈是否为坏圈,避免了现有技术中,采用跳绳手柄头的旋转来计算圈数所造成的,跳绳手柄空转时造成的错误计数的现象的发生。
3.但是,实际在跳绳过程中会产生前后位移导致拍摄的数据不再模型训练的范围内,而且现有的方法识别点较少,一旦有几帧图片没有捕捉到就容易漏识别,而且漏掉的错误数据没有其他数据进行校正;有的采用多点检测的方式采集跳绳数据,但是同样一次跳绳有的位置能够检测出跳绳有的位置不能检测出跳绳导致数据不一致;有的ai识别方案仅识别画面中产生上下位移的物体次数或仅识别人头运动次数,都会导致算法假人假跳也能正常计数;而如果仅通过霍尔传感器或者机械齿轮记录手绳转动数据,会出现手柄空转现象,无法判断坏圈和无法识别出甩绳这种违规跳绳现象。
技术实现要素:
4.本发明的目的在于克服现有技术的缺点,提供了一种多跳绳模式识别计数方法,解决了现有ai识别跳绳计数方法中存在的不足。
5.本发明的目的通过以下技术方案来实现:一种多跳绳模式识别计数方法,所述识别计算方法包括:
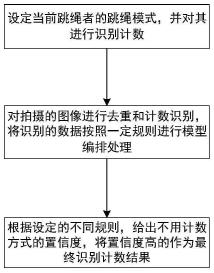
6.设定有绳无绳跳绳模式、踩单车跳绳模式、双脚跳绳模式和双手交叉跳绳模式中的哪种模式,和/或正/反向跳绳模式、最大连跳模式和跳绳位移模式中的哪种模式作为当前的跳绳模式,通过正面ai相机和/或侧面ai相机对当前跳绳模式进行识别计数;
7.将正面ai相机和/或侧面ai相机拍摄的多张图片进行去重处理,保留置信度最高的一次跳绳信息,并进行模型编排处理;
8.通过物理跳绳计数结合ai绳子舞动幅度识别得到物理计数置信度,通过ai识别结合传感器联合计数得到ai综合计数置信度,对比两个置信度的大小,将置信度高的计数作为最终识别计数结果。
9.正面ai相机对踩单车跳绳模式进行识别计数包括:
10.通过ai单脚跳跃识别模型识别每次跳跃是否为双脚同时着地,如果是单脚跳绳,则计算一次跳绳,并在每次单脚跳跃有效识别后记录跳跃时间和置信度,如果不是单脚跳绳,则跳绳犯规当次跳绳不计数;
11.通过ai错误跳跃识别模型识别错误跳绳姿势,当双脚同时落地和出现绊绳时,都分别记录一次错误识别、标记识别时间并保留数据的置信度;
12.通过ai绳子舞动顶点识别模型识别跳绳在顶端出现的次数,跳绳在顶端出现一次,则计数一次。
13.正面ai相机双脚跳绳模式进行识别计数包括:
14.通过ai双脚跳跃识别模型识别每次跳跃时双脚是否并拢,如果是,则计算一次跳绳,并记录跳跃的时间和置信度,如果不是,则当次跳绳不计数;
15.通过ai错误跳跃识别模型识别错误跳绳姿势,当双脚没有并拢和出现绊绳时,都分别记录一次错误识别、标记识别时间并保留数据的置信度;
16.通过ai绳子舞动顶点识别模型识别跳绳在顶端出现的次数,跳绳在顶端出现一次,则计数一次。
17.侧面ai相机对正/向跳绳模式进行识别计数包括:
18.通过ai跳绳顺序检测模型对跳绳进行时序进行排序,当舞动的绳出现的时间顺序为从后向前,则满足正面舞动的顺序,为正向跳绳模式,当舞动的绳出现的时间顺序为从前向后,则满足反面舞动的顺序,为反向跳绳模式;
19.当正向跳绳模式开启时,通过ai跳绳顶点识别模型识别跳绳在顶端出现的次数进行计数,如果ai跳绳顺序检测模型检测到某次舞动的绳出现的时间顺序满足反向舞动的顺序时,则此次计数无效;
20.当反向跳绳模式开启时,直接通过ai跳绳顶点识别模型识别跳绳在顶端出现的次数完成计数。
21.侧面ai相机对最大连跳模式进行识别计数包括:
22.开启ai侧面脚部跳跃识别模型对跳跃的位置进行地面标定,找到地面与跳跃之间的关系,并ai标定跳跃的双脚,跳跃到最高点记录一次,给出每次跳跃骨架识别、跳跃记录一次的时间、跳跃的高度和跳跃一次正确率的置信度;
23.将跳跃的时间与跳绳识别的时间进行比对,获得跳跃的准确计数。
24.所述将跳跃的时间与跳绳识别的时间进行比对,获得跳跃的准确计数包括:
25.如果一次跳绳计数点中出现了两次跳跃计数点,则判断多次跳跃的高度是否一致;如果高度一致,且两次跳绳时间间隔时间一致,则判断为跳绳技术点漏记;如果高度不一致,呈现一高一低的情况,且跳跃时间一致,则跳绳计数判断为两跳一舞绳模式;
26.如果一次跳绳计数中仅出现一次跳跃计数点,则跳绳计数判断为正常的一跳一舞绳模式;
27.如果多次跳绳计数中仅出现一次跳跃计数点,并进一步判断,如果出现时间前后计数的间隔不规律,则判断为跳绳绊绳错误,如果出现多次记录的时间间隔为平均时间间隔的一倍,则判断为跳跃计数点漏识别,如果出现多次跳绳计数时间间隔规律,则判断为最大连跳模式跳跃。
28.所述模型编排处理包括时间间隔判断步骤和数据整合步骤,所述时间间隔判断步骤包括:
29.如果记录时间节奏稳定,则每次计数置信度提升m;
30.如果记录时间节奏存在中断点,则记录前后中断的时间间隔,标记为不计数点,并将中断点出现的时间与ai错误识别模型识别的错误跳绳姿势的时间进行比对,当错误跳绳姿势的时间在不计数点时间范围内时,则错误跳绳姿势识别的置信度提升m;
31.如果两次记录的时间间隔为平均时间间隔的一倍,则记录为可疑漏计数点,并将两次时间间隔与ai错误识别模型识别的错误跳绳姿势进行比对,如果错误跳绳姿势在可疑漏计数时间内,则错误识跳绳姿势识别的置信度提升m,如果可疑漏计数时间范围没没有发现错误跳绳姿势,则自动补齐漏记录的跳绳数据,补齐的数据置信度默认为n;
32.如果ai识别的错误姿势落在ai正确记录点上,则进一步判断ai识别的模式是否与当前跳绳的模式一致,如果一致,则本次ai正确记录有效,如果不一致,则本次ai正确记录无效。
33.所述数据整合步骤包括:将识别各个模式的识别模型、ai错误跳跃识别模型、ai绳子舞动顶点识别模型三个模型识别的数据进行编排,获得最终识别数据。
34.本发明具有以下优点:一种多跳绳模式识别计数方法,采用多种识别数据联合校正,进行数据编排,对不同数据的置信度综合比较后,决定采用哪些数据,扣减哪些数据,从而实现识别的跳绳数据更加准确,可以有效避免了识别过程中产生的各种异常问题导致的识别错误;兼容更多花式跳绳识别,以及可以对更多的违规跳绳的情况做判断。
附图说明
35.图1为本发明方法的流程示意图;
36.图2为正向跳绳的示意图;
37.图3为反向跳绳的示意图;
38.图4为连跳跳绳的示意图;
39.图5为跳绳计数点和跳跃计数点比对示意图;
40.图6为时间间隔判断示意图。
具体实施方式
41.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本技术实施例的组件可以以各种不同的配置来布置和设计。因此,以下结合附图中提供的本技术的实施例的详细描述并非旨在限制要求保护的本技术的保护范围,而是仅仅表示本技术的选定实施例。基于本技术的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本技术保护的范围。下面结合附图对本发明做进一步的描述。
42.如图1所示,本发明具体涉及一种多跳绳模式识别计数方法,其包括以下内容:
43.s1、通过一个带摄像头的触屏去手动设定的,或者通过手机app/公众号/小程序连接摄像头手动设定有绳无绳跳绳模式、踩单车跳绳模式、双脚跳绳模式和双手交叉跳绳模式中的哪种模式,和/或正/反向跳绳模式、最大连跳模式和跳绳位移模式中的哪种模式作为当前的跳绳模式,通过正面ai相机和/或侧面ai相机对当前跳绳模式进行识别计数,多个跳绳模式可以同时存在。
44.s2、将正面ai相机和/或侧面ai相机拍摄的多张图片进行去重处理,保留置信度最高的一次跳绳信息,并进行模型编排处理;
45.其中,去重处理为由于ai图像识别的原理是基于摄像机拍摄的次数,一秒25-60帧的摄像机一次有效计数会拍摄到很多张图片,因此算法需要将拍摄到的一次有效计数的多张图片去重处理,保留置信度最高的一次跳绳信息。
46.s3、通过物理跳绳计数结合ai绳子舞动幅度识别得到物理计数置信度,通过ai识别结合传感器联合计数得到ai综合计数置信度,对比两个置信度的大小,将置信度高的计数作为最终识别计数结果。
47.进一步地,正面ai相机还支持跳绳防伪(跳绳防伪指的是,有人利用ai图像识别的漏洞,对跳绳识别采用非真人运动,如纸片人上下抖动,使计数出现不准确),在开启跳绳防伪功能后,在一分钟跳绳的过程中,一共分n次识别人脸。识别的时间和次数可自行设置,默认设置为:第一次,跳绳开始后3秒左右,识别人脸一次;第二次,跳绳开始后30秒左右,识别人脸一次;第三次,跳绳开始后58秒左右,识别人脸一次。多次识别中,至少有效识别一次,跳绳有效,否则本次跳绳数据无效。
48.进一步地,通过手机或大屏幕手动开启有绳跳绳模式后,ai以识别绳为主,识别跳跃的人体为辅。通过有跳绳顶点识别模型和脚部跳跃识别模型进行识别,有绳模式手动开启后,才能激活连跳模式、正反面舞绳模式、位移模式的开启。两种模型综合判断,可杜绝舞绳不跳的违规情况发生。
49.开启无绳跳绳模式后,ai不识别绳,仅识别跳跃的人体。跳跃过程中,不需要一直面对镜头,只要在规定的区域内正常跳跃都能检出。无绳模式开启后,不能支持连跳模式、正反面舞绳模式、位移模式;不支持踩单车模式。此模式开启后,可自动判断真人假跳的违规现象。
50.进一步地,花式跳绳为手臂交叉跳绳的方式,开启手臂交叉跳绳模式时,即仅记录跳绳顶端数据,不记录别的数据信息,当关闭手臂交叉跳绳模式后,系统会自动提示手臂交叉跳绳属于犯规动作,此时调取一个手臂交叉跳绳姿势识别模型,识别正面摄像机拍摄的
跳绳图像,识别双手交叉的模型,当识别到跳绳过程中,双手有交叉现象的时候,提示犯规动作。
51.进一步地,踩单车跳绳模式为双脚轮流切换的跳绳方式,开启踩单车跳绳模式后,不仅可以记录踩单车的跳绳方式,还可以记录单脚跳绳和换脚跳绳的方式;踩单车跳绳模式下不支持无绳跳绳模式。
52.其中,正面ai相机对踩单车跳绳模式进行识别计数包括:
53.a1、通过ai单脚跳跃识别模型识别每次跳跃是否为双脚同时着地,如果不是,则计算一次跳绳,并在每次单脚跳跃有效识别后记录跳跃时间和置信度,如果是,则跳绳犯规当次跳绳不计数;
54.a2、通过ai错误跳跃识别模型识别错误跳绳姿势,当双脚同时落地和出现绊绳时,都分别记录一次错误识别、标记识别时间并保留数据的置信度;
55.a3、通过ai绳子舞动顶点识别模型识别跳绳在顶端出现的次数,跳绳在顶端出现一次,则计数一次。
56.进一步地,双脚跳绳模式,指的是双脚并拢时上下跳跃,开启双脚跳绳模式后,只能记录双脚并拢的跳绳为有效跳绳,其他姿势的跳绳都无效;
57.其中,正面ai相机对双脚跳绳模式进行识别计数包括:
58.b1、通过ai双脚跳跃识别模型识别每次跳跃时双脚是否并拢,如果是,则计算一次跳绳,并记录跳跃的时间和置信度,如果不是,则当次跳绳不计数;
59.如果出现舞动一次跳绳,跳跃两次的情况时,ai双脚跳跃识别模型,仅需要记录所有跳跃动作和每次跳跃的时间,再与ai绳子舞动顶点识别模型得到的绳子数据进行综合比对。
60.b2、通过ai错误跳跃识别模型识别错误跳绳姿势,当双脚没有并拢和出现绊绳时,都分别记录一次错误识别、标记识别时间并保留数据的置信度;
61.b3、通过ai绳子舞动顶点识别模型识别跳绳在顶端出现的次数,跳绳在顶端出现一次,则计数一次。
62.进一步地,正向跳绳和反向跳绳如图2和图3所示,当系统检测到侧面相机开启时,侧面ai相机识别的数据,可以手动切换正向跳绳检测和反向跳绳检测两种模式,其中,侧面ai相机对正/向跳绳模式进行识别计数包括:
63.c1、通过ai跳绳顺序检测模型对跳绳进行时序进行排序,当舞动的绳出现的时间顺序为从后向前,则满足正面舞动的顺序,为正向跳绳模式,当舞动的绳出现的时间顺序为从前向后,则满足反面舞动的顺序,为反向跳绳模式;
64.c2、当正向跳绳模式开启时,通过ai跳绳顶点识别模型识别跳绳在顶端出现的次数进行计数,如果ai跳绳顺序检测模型检测到某次舞动的绳出现的时间顺序满足反向舞动的顺序时,则此次计数无效;
65.c3、当反向跳绳模式开启时,直接通过ai跳绳顶点识别模型识别跳绳在顶端出现的次数完成计数。
66.进一步地,连跳跳绳模式如图4所示,当系统检测到侧面ai相机开启时,可以在最大连跳模式和1至2跳1舞绳模式之间切换。常规是1至2次跳跃,绳舞动一次,若出现最大连跳情况时,显示犯规;手动开启最大连跳模式后,支持1至2跳1舞绳模式+最大连跳模式一并
都能识别。
67.其中,侧面ai相机对最大连跳模式进行识别计数包括:
68.d1、开启ai侧面脚部跳跃识别模型对跳跃的位置进行地面标定,找到地面与跳跃之间的关系,并ai标定跳跃的双脚,跳跃到最高点记录一次,给出每次跳跃骨架识别、跳跃记录一次的时间、跳跃的高度和跳跃一次正确率的置信度;
69.d2、将跳跃的时间与跳绳识别的时间进行比对,获得跳跃的准确计数。
70.具体为,如图5所示,如果一次跳绳计数点中出现了两次跳跃计数点,则判断多次跳跃的高度是否一致;如果高度一致,且两次跳绳时间间隔时间一致,则判断为跳绳技术点漏记;如果高度不一致,呈现一高一低的情况,且跳跃时间一致,则跳绳计数判断为两跳一舞绳模式;
71.如果一次跳绳计数中仅出现一次跳跃计数点,则跳绳计数判断为正常的一跳一舞绳模式;
72.如果多次跳绳计数中仅出现一次跳跃计数点,并进一步判断,如果出现时间前后计数的间隔不规律,则判断为跳绳绊绳错误,如果出现多次记录的时间间隔为平均时间间隔的一倍,则判断为跳跃计数点漏识别,如果出现多次跳绳计数时间间隔规律,则判断为最大连跳模式跳跃。
73.进一步地,最大连跳模式即识别跳跃一次舞绳2-6圈,若关闭最大连跳模式,则系统默认设定最大连跳是违规,则模型识别到最大连跳的动作时候,自动判断此动作违规;若开启最大连跳模式,则系统默认设定最大连跳是不违规,则模型识别到最大连跳的动作时候,自动判断此动作不违规,并记录两连跳、三连跳、四连跳等的次数。
74.进一步地,跳绳位移识别指的是跳绳者在跳绳时发生比较严重的位移或方向转动,这将会严重影响正面ai相机的正常识别;如果侧面ai相机启动,即可开启跳绳位移模式。也就是说,当人体检测模型识别到人体发生严重偏移的时候,能够将人体识别和跳绳顶端识别的模型从识别正面ai相机的数据切换到识别侧面ai相机的数据,正面和侧面ai相机能够自由切换模型,这样才能更加友好的支持跳绳者边条变动时的正常识别。如果关闭侧面ai相机,则不支持跳绳者边跳变动的情况。跳绳者只能在画定的区域内,保持正面ai相机进行跳绳运动。当跳绳时发生比较严重的位移时,正面ai相机会发出动作违规的警告。
75.因此,不论是正面ai相机还是侧面ai相机,都需要设定一个电子线圈,并增加一个识别人体的正面和侧面的模型。能够根据人体的运动情况,有效判断电子线圈内,跳绳者是否违规动作跳绳,或跳绳顶端识别模型是否需要切换正面ai相机数据还是侧面ai相机数据,去识别跳绳。
76.进一步地,如图6所示,模型编排处理包括时间间隔判断步骤和数据整合步骤,所述时间间隔判断步骤包括:
77.步骤1、如果记录时间节奏稳定,则每次计数置信度提升20%;
78.步骤2、如果记录时间节奏存在中断点,则记录前后中断的时间间隔,标记为不计数点,并将中断点出现的时间与ai错误识别模型识别的错误跳绳姿势的时间进行比对,当错误跳绳姿势的时间在不计数点时间范围内时,则错误跳绳姿势识别的置信度提升20%;
79.步骤3、如果两次记录的时间间隔为平均时间间隔的一倍,则记录为可疑漏计数点,并将两次时间间隔与ai错误识别模型识别的错误跳绳姿势进行比对,如果错误跳绳姿
势在可疑漏计数时间内,则错误识跳绳姿势识别的置信度提升20%,如果可疑漏计数时间范围没没有发现错误跳绳姿势,则自动补齐漏记录的跳绳数据,补齐的数据置信度默认为60%;
80.步骤4、如果ai识别的错误姿势落在ai正确记录点上,则进一步判断ai识别的模式是否与当前跳绳的模式一致,如果一致,则本次ai正确记录有效,如果不一致,则本次ai正确记录无效。
81.进一步地,数据整合步骤包括:将识别各个模式的识别模型、ai错误跳跃识别模型、ai绳子舞动顶点识别模型三个模型识别的数据进行编排,获得最终识别数据;具体为:
82.a、当有效跳绳的数据距离无效跳绳的数据太近,有效信息标记为疑似出错。同样,当有效跳跃的数据距离无效跳绳的数据太近,有效跳绳数据标记为疑似出错。
83.b、将跳绳疑似数据和跳跃疑似数据的出错时间,与ai错误跳跃识别模型的数据进行比对,出现如下情况:
84.情况一:ai跳绳错误识别有数据,另外两个模型在近似时间内都有标记疑似,此次跳绳数据被扣减。
85.情况二:ai跳绳错误识别有数据,另外两个模型在近似时间内仅一个有标记疑似,此次跳绳数据被扣减。
86.情况三:ai跳绳错误识别有数据,另外两个模型在近似时间内没有标记疑似,此次跳绳数据被保留。
87.情况四:ai跳绳错误识别无数据,另外两个模型在近似时间内都有标记疑似,此次跳绳数据将被扣减。
88.情况五:ai跳绳错误识别无数据,另外两个模型在近似时间内仅一个有标记疑似,此次跳绳数据将被保留。
89.数据整合的时间可以根据算力的情况,自行设定,例如,1秒、3秒、5秒、10秒、20秒、30秒等整合一次。
90.进一步地,通过物理跳绳计数结合ai绳子舞动幅度识别得到物理计数置信度包括以下内容:
91.物理计数跳绳的原理是,跳绳的计数模块识别到跳绳舞动一周达到360度时,记录一次跳绳。当跳绳舞动一周小于360度时,不计数。这样就会导致有的人跳绳,由于手臂张的比较开,每次绳的舞动幅度就会小于360度,造成了物理计数的跳绳识别不准确;当开启ai相机与计数跳绳同时计数的模式时,正面ai相机自动开启绳子舞动幅度识别的模型来识别绳子与握绳把手之间构成的角度,具体包括以下内容:
92.1、左右手臂分开识别,当左右手臂识别的角度数据相差小于5
°
(可根据实际情况调整)时,说明测试者正面摄像机,识别数据有效。
93.2、当识别数据有效时,判断识别角度包括以下内容:
94.(1)手臂夹角达到90度以上时,绳子数据置信度90%;
95.(2)手臂夹角达到80-90度时,绳子数据置信度80%;
96.(3)手臂夹角达到70-80度时,绳子数据置信度70%;
97.(4)手臂夹角达到60-70度时,绳子数据置信度60%;
98.(5)手臂夹角达到60度以下时,绳子数据置信度50%;
99.手臂夹角与绳子数据置信度之间的关系的参数,可根据实际情况调整。
100.跳绳物理计数得到的数据与ai绳子舞动幅度识别模型结合后,得到的数据会带有一个置信度。
101.进一步地,通过ai图像识别结合传感器联合计数得到ai综合计数置信度具体包括以下内容:
102.第一步:齿轮或霍尔传感器提供正常跳绳数据,通过蓝牙或wifi,将数据实时传输给ai识别相机。
103.第二步:通过摄像头采集跳绳视频图像,将视频图像按指定规则抽帧后,给每张图像标定一个精确到0.01秒的时序数据。
104.第三步:找到时间间隔较长不计数的一个区间,记录当次跳绳的停止时间和开始时间,确定不计数的时间范围。
105.第四步:识别人体的绊绳姿势和重新舞动跳绳的姿势,并记录该姿势出现的时序时间范围。
106.第五步:对比不计数时间范围内,图像识别非正常跳绳的状态次数,是否有绊绳姿势。如果有,直接扣减计数,如果没有,不扣减计数。
107.第六步:绳柄传感器获取的次数,减去ai图像识别非正常跳绳的状态次数,等于准确数据。
108.第七步:ai+传感器联合计数法,得到的跳绳数据,设定准确度的阈值为80%。
109.这个置信度将与ai识别的其他置信度进行比对。当跳绳物理计数的置信度大于ai计数的置信度,则采用物理计数作为最终结果,当物理计数置信度小于ai综合计数的置信度,则采用ai计数作为最终结果。
110.最后将通过物理跳绳计数结合ai绳子舞动幅度识别得到物理计数置信度与通过ai识别结合传感器联合计数得到ai综合计数置信度进行对比,将置信度高的计数作为最终识别计数结果。
111.以上所述仅是本发明的优选实施方式,应当理解本发明并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本发明的精神和范围,则都应在本发明所附权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1