芯片OCR自动视觉识别训练方法及装置与流程
芯片ocr自动视觉识别训练方法及装置
技术领域
1.本发明涉及一种ocr识别训练方法和设备,具体地说,尤其涉及一种芯片ocr自动视觉识别训练方法及装置。
背景技术:
2.晶圆上的lot字符是在加工晶圆芯片时通过光刻技术实现打印的,因此需要设备专门来识别该一维点阵码才能获取到晶圆的lot信息。芯片晶圆lot字符往往字体较小,经过划片后字符变得模糊,肉眼查看往往会存在疏漏,无法与批次晶圆lot号进行快速对比分析,极易出错。如果晶圆lot识别出错,那么使用该晶圆所封装好的智能卡芯片就存在异常,导致非常严重的损失。
3.芯片出厂之前是完整的4寸、6寸、8寸、12寸硅圆体,每一颗芯片若想独立使用,需要用水刀将完整芯片沿着剪划线进行独立分割,但是由于每个芯片制作厂商对芯片lot字符位置大小不确定,因此在水刀切割时往往会导致lot字符被切断或者切除,这样点阵码就会存在缺失,因此加剧了芯片自动化识别难度。
技术实现要素:
4.本发明的目的,在于提供一种芯片ocr自动视觉识别训练方法及装置,以解决现有技术中缺少一种自动化识别芯片lot字符,lot字符被切断或者切除也可以有效识别的芯片ocr自动视觉识别训练方法及装置的问题。
5.本发明是通过以下技术方案实现的:
6.一种芯片ocr自动视觉识别训练方法,包括如下步骤:定位组件待料、上料、定位组件归位、相机组件拍照、图像分析和输出结构;
7.s1定位组件待料:定位组件在x轴方向上等待上料;
8.s2上料:人工将晶圆放在定位组件上;
9.s3定位组件归位:放有晶圆的定位组件在x轴方向上移动到相机组件下方;
10.s4相机组件拍照:相机组件中的相机在z轴方向聚焦,相机在y轴拍照;
11.s5图像分析:拍照的图像经plc进行ocr识别分析,建立ocr字符训练库;图像分析包括完整的点阵字符集识别分析和碎片样本集字符拼接识别分析;在碎片样本集字符拼接识别分析中采用多角度、多维度拍摄方式,模拟剪划线切割方式,将字符切碎,利用碎片字符进行多种类拼接,形成碎片样本集,完成字符转换,碎片样本集能很好的解决数据不足或者数据缺失导致识别不准的弊端;
12.s6输出结构:输出转换后的结果,然后再重复s1步骤。
13.进一步地,在完整的点阵字符集识别分析中相机拍到完整的字符图片后经plc进行ocr识别分析,形成完整样本集。
14.进一步地,在s5图像分析中拍照的图像为了保证识别的准确性,系统正向识别一次,再反相识别一次。经过反复识别后,字符在整批次晶圆lot中进行核查比对,若该lot已
经出现识别或者未再lot批次中,说明这次识别存在异常,需要人工干预核查并补齐所需打印标签结果,才能生成准确的晶圆lot号。
15.进一步地,完整的点阵字符集识别分析中使用电子显微镜摄像头拍摄,ocr字符训练库采用matlab,通过光亮变化,连体变化,变化灰度的方式,实现字符多维度的ocr字符训练库建立,即点阵字符集的建立。
16.进一步地,在碎片样本集字符拼接识别分析中使用工业智能相机,ocr字符训练库采用matlab,在点阵字符集的基础上,模拟剪划线利用直线算法模拟剪划线角度,将相机采集到的数据进行碎片分割,得到批量的碎片字符集图片,实现字符多维度的ocr字符训练库建立,即碎片字符集的建立,利用这些碎片字符集,还可通过人工标注,强制干预不断扩充碎片字符图片,实现了碎片字符集的建立,从而完善了点阵字符集和碎片字符集两大类深度学习模型,更加确保了识别的准确性。
17.一种使用芯片ocr自动视觉识别训练方法的装置,包括机架,机架上设有控制器、定位组件和相机架,定位组件包括x轴滑台电缸,x轴滑台电缸的滑台ⅰ上设有固定座,固定座上设有导柱和载板,载板上设有调整孔,导柱上滑动设有调整结构,调整结构位于调整孔之间,相机架上设有z轴滑台电缸,z轴滑台电缸的滑台ⅱ上设有y轴滑台电缸,y轴滑台电缸的滑台ⅲ上设有相机固定架,相机固定架上设有相机。
18.进一步地,所述的调整结构包括限位块,限位块滑动设于导柱上,限位块通过调整销紧固在导柱上。
19.进一步地,所述的限位块为l型限位块,l型限位块的限位板夹紧位于载板上的晶圆。
20.进一步地,所述的载板上设有拿取孔,拿取孔方便放置和拿取晶圆;载板上设有磁铁,磁铁用于吸住晶圆环定位。
21.进一步地,所述的机架上设有门板和指示灯,其中一个门板上设有操作显示屏,操作显示屏和指示灯分别与控制器连接。
22.与现有技术相比,本发明的有益效果是:
23.1、自动化识别晶圆上的lot字符,解决人工易出错问题,保证合格率,适应全尺寸晶圆,提高了效率。
24.2、ocr识别库对lot缺失字符的情况进行了单独筛选和建立,确保了识别的准确性。
附图说明
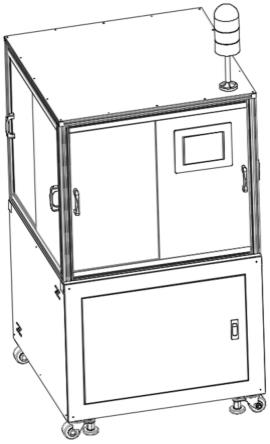
25.图1是本发明的结构示意图ⅰ;
26.图2是本发明的结构示意图ⅱ;
27.图3是本发明的局部结构示意图ⅰ;
28.图4是本发明的局部结构示意图ⅱ;
29.图5是本发明的载板的结构示意图;
30.图6是本发明的调整结构的结构示意图;
31.图7是本发明的流程图。
32.图中:1、指示灯;2、门板;3、操作显示屏;4、机架;5、相机架;6、x轴滑台电缸;7、固
定座;8、导柱;9、限位块;10、调整销;11、调整孔;12、载板;13、z轴滑台电缸;14、拿取孔;15、y轴滑台电缸;16、晶圆;17、相机固定架;18、相机。
具体实施方式
33.下面结合附图对本发明作进一步地描述说明。
34.实施例1、如图7所示,一种芯片ocr自动视觉识别训练方法,包括如下步骤:定位组件待料、上料、定位组件归位、相机组件拍照、图像分析和输出结构;
35.s1定位组件待料:定位组件在x轴方向上等待上料;
36.s2上料:人工将晶圆放在定位组件上;
37.s3定位组件归位:放有晶圆的定位组件由x轴滑台电缸13带动到相机组件下方;
38.s4相机组件拍照:相机组件中的相机在z轴方向聚焦,相机在y轴方向拍照;
39.s5图像分析:拍照的图像经plc进行ocr识别分析,建立ocr字符训练库,ocr字符训练库地建立是一个长期训练完善的过程;图像分析包括完整的点阵字符集识别分析和碎片样本集字符拼接识别分析;在碎片样本集字符拼接识别分析中采用多角度、多维度拍摄方式,模拟剪划线切割方式,将字符切碎,利用碎片字符进行多种类拼接,形成碎片样本集,完成字符转换,碎片样本集能很好的解决数据不足或者数据缺失导致识别不准的弊端;
40.s6输出结构:输出转换后的结果,然后再重复s1步骤。
41.实施例2、一种芯片ocr自动视觉识别训练方法,在完整的点阵字符集识别分析中相机拍到完整的字符图片后经plc进行ocr识别分析,形成完整样本集;在s5图像分析中拍照的图像为了保证识别的准确性,系统正向识别一次,再反相识别一次。经过反复识别后,字符在整批次晶圆lot中进行核查比对,若该lot已经出现识别或者未再lot批次中,说明这次识别存在异常,需要人工干预核查并补齐所需打印标签结果,才能生成准确的晶圆lot号;完整的点阵字符集识别分析中使用电子显微镜摄像头拍摄,ocr字符训练库采用matlab,通过光亮变化,连体变化,变化灰度的方式,实现字符多维度的ocr字符训练库建立,即点阵字符集的建立;在碎片样本集字符拼接识别分析中使用工业智能相机,ocr字符训练库采用matlab,在点阵字符集的基础上,模拟剪划线利用直线算法模拟剪划线角度,将相机采集到的数据进行碎片分割,得到批量的碎片字符集图片,实现字符多维度的ocr字符训练库建立,即碎片字符集的建立,利用这些碎片字符集,还可通过人工标注,强制干预不断扩充碎片字符图片,实现了碎片字符集的建立,从而完善了点阵字符集和碎片字符集两大类深度学习模型,更加确保了识别的准确性,其它与实施例1相同。
42.如图1
–
4所示,实施例3、一种使用芯片ocr自动视觉识别训练方法的装置,包括机架4,机架4上设有plc控制器、定位组件和相机架5,定位组件包括x轴滑台电缸6,x轴滑台电缸6的滑台ⅰ上设有固定座7,固定座7上设有导柱8和载板12,载板12上设有调整孔11,导柱8上滑动设有调整结构,调整结构位于调整孔11之间,相机架5上设有z轴滑台电缸13,z轴滑台电缸13的滑台ⅱ上设有y轴滑台电缸15,y轴滑台电缸15的滑台ⅲ上设有相机固定架17,相机固定架17上设有相机18,plc控制器控制协调各电缸动作,相机18选用电子显微镜摄像头或工业智能相机;x轴滑台电缸6、y轴滑台电缸15和z轴滑台电缸13分别与三个传感器配合,实现相机18和载板12位置的控制,载板12将晶圆16移动到位后,z轴自动聚焦,y轴步进扫描晶圆16上字符,完成扫描,滑台电缸为现有技术,其结构不做具体赘述。
43.实施例4、一种使用芯片ocr自动视觉识别训练方法的装置,如图6所示,所述的调整结构包括限位块9,限位块9滑动设于导柱8上,限位块9通过调整销10紧固在导柱8上,旋转调整销10便可调节限位块9位于导柱8上的位置,以实现不同尺寸晶圆16的定位;所述的限位块9为l型限位块,l型限位块的限位板夹紧位于载板12上的晶圆16;如图5所示,所述的载板12上设有拿取孔14,拿取孔14方便放置和拿取晶圆16;载板12上设有磁铁,磁铁用于吸住晶圆环定位;所述的机架4上设有门板2和指示灯1,其中一个门板2上设有操作显示屏3,操作显示屏3和指示灯1分别与控制器连接,其它与实施例3相同。
44.点阵字符识别需要大量的数据源数据,但是同一款芯片字符数据也仅有部分数据,所以在建立ocr字符识别过程中,字符训练库是一个长期积累的过程,数据集基数越大,识别准确率越高。
45.在建立ocr字符训练库时,采用一组多角度,多维度拍摄,利用算法模拟剪划线切割方式,将字符切碎,利用碎片字符进行多种类拼接,形成碎片样本集,特殊训练的碎片样本集能很好的解决数据不足或者数据缺失导致识别不准的弊端。独立训练的完整样本集和碎片样本集双重验证下保障了我们设备ocr识别的准确率高达99%以上。
46.算法训练:
47.第一步采用电子显微镜摄像头拍摄的算法测试图片,利用电子显微镜能够更好的抓取去字符的细节图片,每个完整的字符可以采集到比较高清的图片,用于完整字符的ocr字符训练集,ocr字符训练库采用的是matlab,在此基础上我们增加了光亮变化,连体变化,变化灰度等方式实现字符多维度下的训练库,后续大量增加数据集不断完善我们的点阵字符集。
48.第二步采用工业智能相机,工业智能相机视野大,可以实现整串的字符串拍照,但是每个字符的细节部分略有模糊,再加上剪划线的影响和位置变动等空间影响,往往识别率不高,在第一步点阵字符集的基础上,利用直线算法模拟剪划线角度将工业相机采集到的数据进行碎片分割,得到了批量的碎片字符集图片,利用这些碎片字符集,进行监督学习,人工标注,强制干预不断扩充碎片字符图片,实现了碎片字符集的建立,从而完善了点阵字符集和碎片字符集两大类深度学习模型,更加确保了识别的准确性。
49.装置的操作流程为:晶圆16第一次识别需要人工将晶圆片放到平台中,对其首个字符,人工手动选取两个字符,在选取过程中会自动识别所选区域的文字,若识别正确,点击确认按钮,系统会自动移动平台进行逐个识别,至到所有字符全部完成识别后停止,为了保证识别的准确性,系统会正识别一次,反相在识别一次。
50.经过反复识别后,字符会在整批次晶圆lot中进行核查比对,若该lot已经出现识别或者未再lot批次中,说明这次识别存在异常,需要干预核查,才能生成准确的晶圆lot号。
51.手工设置完成后,第一张晶圆识别没有问题,即可进入同型号自动识别模式,只需将晶圆片放入载板并固定,系统会自动进行识别,同型号所有晶圆片识别完成后,所有识别数据和导入数据进行一一匹配,若匹配过程有错则不生成打印标签,只需人工补齐所需打印标签结果即可打印,大大方便了员工操作效率,该设备可以满足4寸、6寸、8寸、12寸晶圆的识别。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1