一种基于掩模与自适应滤波的红外弱小目标检测跟踪方法与流程
1.本发明设计一种红外弱小目标检测跟踪方法,特别是一种面向于高速红外弱小目标的在轨快速高可靠检测跟踪方法,属于航天遥感领域。
背景技术:
2.红外相机主要通过接收目标自身的红外辐射进行观测,尤其是对导弹、飞机等高速高热辐射目标有显著的敏感性,使红外目标检测与跟踪技术在军事侦察和预警方面发挥重要作用。对于宽幅卫星红外遥感图像,这些敏感飞行目标的尺寸很小,往往呈现为斑状或点状,目标的信噪比很低,易受噪声、杂波或者云层干扰,经常会淹没于背景之中。因此,对于红外弱小目标,通常利用目标运动或变化特性进行检测,例如帧间差分法和背景差分法,具有计算简单直接、速度快的特点,使其更适用于资源有限的卫星在轨实时侦察预警任务。
3.但是帧间差分法和背景差分法对噪声和目标运动引起的背景变化等干扰因素较为敏感。而且,在目标发生遮挡的情况时,算法很容易将再次出现的目标误认为是另一个运动目标,不能应对遮挡变化。此外,由于帧间差分法主要是利用灰度值的差值来检测运动目标,当目标内部大部分像素点的灰度值相同时,帧间差分法得到的差分图像只包含目标物体的两侧图像,而在目标内部产生了“空洞”现象,难以得到目标的完整轮廓。而且由于目标运动状态多变,背景差分法所构造的背景难以完全剔除各种真实目标。
技术实现要素:
4.本发明解决的技术问题是:克服现有技术不足,解决了卫星在轨红外弱小目标检测跟踪虚警高、轨迹关联差(目标轨迹点不完整或者发生遮挡时跟踪丢失,再出现时无法将两条轨迹关联起来)的问题,提供了一种实时的高精度红外弱小目标检测跟踪方法。
5.本发明的技术解决方案是:
6.一种基于掩模与自适应滤波的红外弱小目标检测跟踪方法,包括如下步骤:
7.1)利用上一帧图像i
t-1
对应的背景图像从当前帧的图像i
t
中提取获得多个疑似目标,获得由当前帧中多个疑似目标坐标组成的疑似目标坐标集和每个疑似目标的图像切片若当前帧的疑似目标集为空时,进入步骤6);反之进入步骤2);
8.2)对于步骤1)获得的疑似目标坐标集中的第k个疑似目标的坐标在当前帧图像i
t
中以位置处的像素点为中心提取一个图像块,对图像块进行边缘检测,将不符合目标尺寸范围的疑似目标从中疑似目标坐标集剔除,遍历疑似目标坐标集中的所有元素,然后进入步骤3);
9.3)根据疑似目标坐标集中的第k个疑似目标的坐标从上一帧图像i
t-1
中提取出疑似目标k对应的多个候选匹配目标组成候选匹配目标集,并获得
每个候选匹配目标的图片切片
10.4)若某疑似目标k对应的候选匹配目标集为空,则判定疑似目标k为新检测到的疑似目标,将疑似目标k的信息赋值到掩膜集合m{m
×
n}中,并返回步骤3),对下一个疑似目标进行处理,直至遍历所有疑似目标后进入步骤6);反之,则进入步骤5);掩膜集合m{m
×
n}由m行n列的元素组成,m等于图像i
t
中长度方向上像素的个数,n等于图像i
t
中宽度方向上像素的个数;每个元素内包括用于表征图像上对应像素点的信息;
11.5)利用步骤1)获得的疑似目标图像切片和步骤3)获得的候选匹配目标图片切片确定疑似目标k与对应的jk个候选匹配目标的匹配系数,提取出满足阈值要求的候选匹配目标作为疑似目标k的候选目标对掩膜集合m{m
×
n}中与候选目标位置对应元素的信息进行更新;若某疑似目标k不存在对应的候选目标则判定疑似目标k为新检测到的疑似目标,将疑似目标k的信息赋值到掩膜集合m{m
×
n}中,然后返回步骤3),对下一个疑似目标进行处理,直至遍历所有疑似目标后进入步骤6);
12.6)利用掩膜集合m{m
×
n},对上一帧图像i
t-1
对应的背景图像进行更新,获得当前帧图像i
t
对应的背景图像当前帧的疑似目标集为空时,前帧图像i
t
对应的背景图像等于上一帧图像i
t-1
对应的背景图像
13.7)利用掩膜集合m{m
×
n},判读疑似目标为真实目标还是干扰目标,并对掩膜集合m{m
×
n}中该疑似目标对应元素的信息进行更新;
14.8)利用掩膜集合m{m
×
n}中真实目标对应元素的信息,进行轨迹关联,完成对同一目标的完整跟踪。
15.优选地,所述掩膜集合m{m
×
n}中每个元素内用于表征图像上对应像素点的信息采用6个特征向量进行表示,分别为:
16.m{i}{1}为元素m{i}对应位置所属目标类型;目标类型包括:背景点,对应m{i}{1}值为0;干扰目标,对应m{i}{1}值为1;疑似目标,对应m{i}{1}值为2;真实目标,对应m{i}{1}值为3;1≤i≤m
×
n;
17.m{i}{2}为元素m{i}对应位置所属目标的编号;
18.m{i}{3}为元素m{i}对应位置所属目标最新时刻的在图像长、宽方向上的像素个数;
19.m{i}{4}为元素m{i}对应位置所属目标的完整轨迹集;完整轨迹集由轨迹对应目标的中心元素在每帧图像中的位置信息组成;
20.m{i}{5}为元素m{i}对应位置所属目标最新时刻的速度;
21.m{i}{6}为元素m{i}对应位置所属目标最新时刻的运动方向。
22.优选地,所述步骤1)中获得由当前帧中多个疑似目标坐标组成的疑似目标坐标集和每个疑似目标的图像切片的方法,具体为:
23.11)求解当前帧图像与上一帧图像的像素差值,获得当前帧图像与上一帧图像的
差值图像df=i
t-i
t-1
;同时求解当前帧与背景帧图像的像素差值,获得当前帧图像与背景帧图像的差值图像
24.12)将差值图像df中绝对值大于thrf的差值点或差值图像db中绝对值大于thrb的差值点进行保留作为候选点,从当前帧图像上找到与候选点位置对应的像素点,并生成联通区域,然后分别记录这些联通区域的中心坐标点,根据掩膜集合中与中心坐标点位置对应元素的目标类型,从中心坐标点中剔除目标类型为干扰目标的中心坐标点,将其余中心坐标点作为疑似目标的中心坐标并加入疑似目标坐标集,得到疑似目标坐标集k=1,2,3,
…
,k;thrf与thrb的取值范围为8~12;
25.13)对于获得的疑似目标坐标集中的第k个疑似目标的坐标在当前帧图像i
t
中以位置处的像素点为中心提取一个图像块,对该图像块进行边缘检测,提取出疑似目标k的边缘形状,并计算得到疑似目标k边缘形状所包围的像素构成的图像切片;
26.14)若步骤13)得到的疑似目标k边缘形状所包围的像素构成的图像切片尺寸不在目标先验尺寸范围内,则将疑似目标k从疑似目标坐标集中剔除,反之将步骤13)获得的图像切片作为疑似目标k的图像切片
27.优选地,步骤13)中所述图像块的尺寸大于目标最大尺寸的1.25~1.7倍,小于目标最大尺寸的2倍。
28.优选地,所述步骤3)从上一帧图像i
t-1
中提取出疑似目标k对应的多个候选匹配目标组成候选匹配目标集,并获得每个候选匹配目标的图片切片的方法,具体为:
29.31)在上一帧图像i
t-1
中的同样以位置处的像素点为中心,选定一个大小为q
×
q的图像块作为目标候选区域;
30.32)结合掩模集合m{m
×
n},从目标候选区域中,挑选出对应掩模集合中元素的目标类型不为背景目标的元素作为候选匹配目标,组成候选匹配目标集,j=1,2,3,
…
,jk,其中,jk为疑似目标k对应的目标候选区域中的候选匹配目标的个数;
31.33)根据掩模集合m{m
×
n}中特征向量m{i}{3}的信息,获得每个候选匹配目标的图像切片
32.优选地,步骤31)所述的取值范围如下:
33.3v
·
δt/r≤q≤5v
·
δt/r
34.其中,r为图像分辨率,v为目标最大运动速度,δt为相相邻帧图像之间的时间差。
35.优选地,步骤5)确定匹配系数的方法,具体为:
[0036][0037]
其中,α为滤波差异系数,α的取值范围为0.01~0.2;为自适应滤波器dfk对疑似目标图像切片的计算结果,为自适应滤波器dfk对候选匹配目标图片切片的计算结果;和为候选匹配目标在当前帧图像i
t
中在行方向和列方向上的预测位置;为第k个疑似目标的坐标。
[0038]
优选地,所述和的确定方法,具体为:
[0039][0040]
其中,为候选匹配目标在上一帧图像i
t-1
中的位置坐标,δt为两相邻帧之间的时间间隔,为由掩膜集合m{m
×
n}获得的候选匹配目标的运动速度,为由掩膜集合m{m
×
n}获得的候选匹配目标与图像行方向之间的夹角。
[0041]
优选地,所述步骤6)获得当前帧图像i
t
对应的背景图像的方法,具体为:
[0042][0043]
其中,λ为背景更新系数,λ的取值范围为0.7~0.9;表示根据掩膜集合,将当前帧图像i
t
中对应目标类型为背景或干扰目标的像素点的像素值保持不变,其余像点的像素值至零处理后获得的像素矩阵;表示在当前帧图像i
t
中,将疑似目标与真实目标所对应的像素块作为被替换区域,将被替换区域整体替换为邻域背景的像素块,并根据掩膜集合,将当前帧图像i
t
中对应目标类型为背景与干扰目标的像素点的像素置零处理后获得的像素矩阵;邻域背景的像素块中每个像素的值等于被替换区域外侧上下左右四个方向上等大小像素块中对应像素的均值。
[0044]
优选地,所述步骤7)判读疑似目标为真实目标还是干扰目标的方法,具体为:对于掩模集合中特征向量目标类型为疑似目标的元素,当目标在整个图像序列中出现的次数超过numd或目标轨迹停止更新超过numo时,则对该元素的对应位置所属目标的完整轨迹集的长度进行计算,若轨迹长度超过thr
track
;若则将该元素的目标类型判定为真实目标,否则将其判定为干扰目标;numd的取值范围等于5~10s所对应的图像帧数;numo的取值范围等于10~15s所对应的图像帧数;thr
track
取值范围为3~5。
[0045]
优选地,所述步骤8)进行轨迹关联的方法,具体为:
[0046]
当掩模集合中目标类型为真实目标的元素对应轨迹停止更新超过numo帧时,则判定该真实目标运动完成,并将目标编号及轨迹加入到轨迹集track中;
[0047]
当有新轨迹加入到轨迹集中时,根据轨迹集中已知轨迹的结束轨迹点的运动速度和方向进行轨迹预测,得到已知轨迹在相应新轨迹中的预测位置,通过与新轨迹的起始位置和新旧两个轨迹对应目标的运动速度及方向进行比对,从而完成目标的完整跟踪;numo
的取值范围等于10~15s所对应的图像帧数。
[0048]
优选地:初始的背景图像中每个像素的像素值等于初始获得的n帧图像中对应位置像素点的平均值,n的取值范围为5~10。
[0049]
本发明与现有技术相比的优点在于:
[0050]
(1)本发明通过生成一个目标掩模来记录各种类型目标信息,从而在检测时大幅降低干扰目标的影响,提供检测精度。
[0051]
(2)本发明针对敏感目标在飞行过程中呈现动态变化的特点,构建了一个自适应滤波器,可全时地提取目标的特征信息,增加了匹配正确率。
[0052]
(3)本发明对所有真实目标的轨迹进行了关联,可一定程度解决目标遮挡问题,结合掩模包含的目标特征,能够生成目标的完整态势信息。
附图说明
[0053]
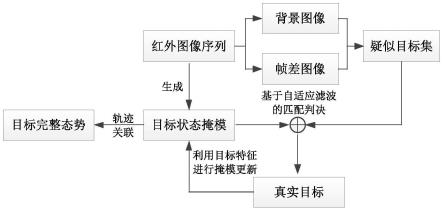
图1为本发明方法流程图;
[0054]
图2为本发明自适应滤波器生成方法图。
具体实施方式
[0055]
对于卫星在轨红外侦察预警系统,情报信息的可靠性和时效性是战场支援的关键,尤其是对高速飞行目标,只有实时或准实时的检测跟踪才能发挥出天基侦察预警系统的真正作用,因此选用帧差法和背景差分法进行联合检测,实现对海量红外图像序列的快速处理。但该类方法易受噪声、成像坏点、成像亮点和移动朵云的干扰,这些干扰与周围环境存在明显差异,与真实红外弱小目标类似,往往以斑或点的形式存在于视场中,导致对真实目标进行检测时虚警较高,而且当目标被遮挡后也会发生跟丢情况。但与真实目标不同的是,这些干扰目标的形状特征和运动特性与真实目标存在一定差异,因此,基于这些先验知识,本发明利用图像序列生成一个掩模信息,通过边缘检测算子提取出各类目标的完整轮廓特征用以支撑检测,同时将其在检测跟踪过程的各类重要特征信息进行实时存储分析,并利用这些信息构建自适应滤波器,进一步确认真实目标,大幅降低虚警,在保证实时处理的同时提升情报信息可靠性。
[0056]
如图1所示,本发明方法的具体实现步骤如下:
[0057]
(1)根据所获取的遥感红外图像尺寸大小m
×
n,预生成初始掩模集合m{m
×
n},其中,m为遥感红外图像的每一行像素数,n为遥感红外图像的每一列像素数,即m{m
×
n}包含了相机所观测视野中的所有观测点信息,对于任一个元素m{i},1≤i≤m
×
n,可根据其索引i找到该元素在遥感图像观测视野中所对应的位置。掩模集合m{m
×
n}中每个元素m{i},分别对应有6个特征向量m{i}{j},1≤i≤m
×
n,1≤j≤6。
[0058]
其中,
[0059]
m{i}{1}为该元素对应位置所属目标类型;目标类型包括:背景点,对应m{i}{1}值为0;干扰目标,对应m{i}{1}值为1;疑似目标,对应m{i}{1}值为2;真实目标,对应m{i}{1}值为3;只有目标切片的中心点元素有值,其余为空。疑似目标包括:干扰目标和真实目标。对于背景点,m{i}包含1个特征向量,其余特征向量为空。对于疑似目标、干扰目标和真实目
标,m{i}包含6个特征向量。
[0060]
m{i}{2}为该元素对应位置所属目标的编号;
[0061]
m{i}{3}为该元素对应位置所属目标最新时刻的尺寸特征(即在遥感红外图像长、宽方向上的像素个数);
[0062]
m{i}{4}为该元素对应位置所属目标的完整轨迹集;完整轨迹集由轨迹对应目标的中心元素在每帧图像中的位置信息组成;
[0063]
m{i}{5}为该元素对应位置所属目标最新时刻的速度;
[0064]
m{i}{6}为该元素对应位置所属目标最新时刻的运动方向。
[0065]
初始掩模集合中每个元素的特征向量的初始值设置为0,即假设所有像素点初始目标类型均为背景点。
[0066]
(2)根据初始获得的n帧遥感红外图像(n一般为5~10张图像){i1,i2,...,in},对每个对应位置的像素点进行求和取平均处理,获得初始的背景图像初始的背景图像中每个像素的像素值等于n帧遥感红外图像中对应位置像素点的平均值。
[0067]
(3)通过初始的背景图像,对当前帧的遥感红外图像进行疑似目标提取,获得由当前帧中疑似目标坐标组成的疑似目标坐标集和每个疑似目标的图像切片若当前帧的疑似目标集为空时,重复步骤(3)对下一帧的遥感红外图像进行疑似目标提取,直至疑似目标坐标集不为空时,进入步骤(4);若当前帧的疑似目标集为空时,则当前帧的背景图像与上一帧的背景图像相同;
[0068]
(31)利用当前帧图像和上一帧图像的差异性,以及当前帧图像和上一帧获得的背景帧图像的差异性来对目标进行检测,分别求解当前帧图像与上一帧图像的像素差值,获得当前帧图像与上一帧图像的差值图像df=i
t-i
t-1
;同时求解当前帧与背景帧图像的像素差值,获得当前帧图像与背景帧图像的差值图像差值图像中的每个点作为差值点,当前帧图像与上一帧图像的差值图像中每个差值点的像素值等于当前帧图像对应像素点的值与上一帧图像对应像素点的值之间的差值。当前帧图像与背景帧图像的差值图像中每个差值点的像素值等于当前帧图像对应像素点的值与背景帧图像对应像素点的值之间的差值。
[0069]
(32)将差值图像df中绝对值大于thrf的差值点或差值图像db中绝对值大于thrb的差值点进行保留(经统计,thrf与thrb一般取值范围为8~12)作为候选点,从当前帧图像上找到与候选点位置对应的像素点,并利用联通域标记方法(已有成熟方法)将这些像素点进行联通生成k个联通区域,然后分别记录这些联通区域的中心坐标点,根据掩膜集合中与中心坐标点位置对应元素的目标类型,从中心坐标点中剔除目标类型为干扰目标的中心坐标点,将其余中心坐标点作为疑似目标的中心坐标并加入疑似目标坐标集,得到疑似目标坐标集k=1,2,3,
…
,k,其中,表示第k个疑似目标中心在观测视野中处于第列,第行的像素点(位置)。(初始获得疑似目标坐标集时,疑似目标坐标集中每个元素的所属目标类型均为疑似目标,即
[0070]
(33)对于步骤(32)获得的疑似目标坐标集中的第k个疑似目标的坐标在当前帧图像i
t
中以位置处的像素点为中心提取一个图像块,图像块的尺寸大于目标最大尺寸的1.25~1.7倍,小于目标最大尺寸的2倍。(选取原因是由于红外遥感观测卫星轨道固定,其分辨率也是可确定的,因此可以利用这一先验知识统计得到目标在观测图像中的尺寸范围),并利用“sobel”索贝尔算子来对该图像块进行边缘检测,提取出疑似目标k的边缘形状,并可计算得到疑似目标大小及边缘形状所包围的像素构成疑似目标的图像切片如果疑似目标k的图像切片的尺寸不在统计得到的目标对应观测图像中尺寸范围内,则将目标k从疑似目标坐标集中剔除,遍历疑似目标坐标集中的所有元素,然后进入步骤(4);
[0071]
(4)根据步骤(3)获得的疑似目标坐标集,从上一帧图像中提取出每个疑似目标对应的候选匹配目标集和候选匹配目标图片切片
[0072]
(41)对于疑似目标k,在上一帧图像i
t-1
中的同样以位置处的像素点为中心,选定一个大小为q
×
q的图像块(图像块大小q主要结合图像分辨率r和目标最大运动速度v进行判断,3v
·
δt/r≤q≤5v
·
δt/r,其中δt为相邻帧图像之间的时间差)作为目标候选区域;
[0073]
(42)结合掩模集合m{m
×
n},从目标候选区域中,挑选出对应掩模集合中元素的目标类型不为背景目标的点,作为候选匹配目标,组成候选匹配目标集,j=1,2,3,
…
,jk,其中,jk为疑似目标k对应的目标候选区域中的候选匹配目标数。根据掩模集合m{m
×
n}中特征向量m{i}{3}的信息,获得每个候选匹配目标的图像切片
[0074]
(43)重复步骤(41)~(42)k次,获得每个疑似目标的候选匹配目标集。
[0075]
(5)若某疑似目标k对应的候选匹配目标集为空,则说明当前帧中的疑似目标k为新检测到的疑似目标(对应值为2),将新编号赋值到掩膜集合中,并将尺寸特征和目标位置分别赋值到和完成该帧目标检测,进入步骤(7);
[0076]
若候选匹配目标集{t
p
_k(j)}不为空,进入步骤(6);
[0077]
(6)利用步骤(3)获得的疑似目标图像切片和步骤(4)获得的候选匹配目标图片切片分别确定每个疑似目标与对应的jk个候选匹配目标的匹配系数,提取出满足阈值要求的候选匹配目标作为疑似目标k的候选目标根据候选目标获得疑似目标k的运动方向及速度,并对掩模中候选目标对应的元素的特征向量进行更新;若某疑似
目标k不存在对应的候选目标则定义疑似目标k为新检测到的疑似目标(即),更新掩模中对应位置的元素的特征向量;
[0078]
(61)利用步骤(3)获得的疑似目标图像切片和步骤(4)获得的候选匹配目标图片切片利用一个与目标大小相同的自适应滤波器dfk对疑似目标k与疑似目标k对应的候选匹配目标集中所有候选匹配目标进行匹配,匹配系数的计算如下所示:
[0079][0080]
上式中,α为滤波差异系数(α一般取0.01~0.2,与图像像素值动态范围为负相关),为自适应滤波器dfk对疑似目标图像切片的计算结果,为自适应滤波器dfk对候选匹配目标图片切片的计算结果;为疑似目标k在图像i
t
中所占据的所有像素构成的矩阵,即疑似目标图像切片(切片主要利用步骤33中的边缘检测结果进行提取),为第j个候选匹配目标在图像i
t-1
中的候选匹配目标图像切片(表示目标所占据的所有像素构成的矩阵,并等比例缩放到与图像i
t
相同大小),和为候选匹配目标在当前帧图像i
t
中在行方向和列方向上的预测位置,计算方法如下:
[0081][0082]
上式中,为候选匹配目标在图像i
t-1
中的位置,δt为两相邻帧之间的时间间隔,和分别为候选匹配目标的运动速度和运动方向(方向为运动方向与行方向x之间的夹角)。
[0083]
在构建动态滤波器时,由于目标在红外遥感图像中的成像大小一般在1
×
1到10
×
10范围内进行连续变化,而高速运动目标由于其尾焰温度较高,红外相机在成像时也会将部分尾焰进行记录,导致目标在高速运动时在图像中形成一个具有方向的椭圆形亮斑,亮斑的轴线方向与目标运动方向相近。对于动态变化的红外弱小目标,如果使用一个固定的滤波器对其进行特征提取,难以实现对目标的时刻稳定捕捉。因此,本发明根据目标特征设计了一个矩形的带有角度的自适应滤波器,该滤波器以一个5
×
5的滤波器df
base
为基准,根据目标k的长lk和宽wk生成自适应滤波器dfk,dfk的长为lk+2,宽为wk+2,其滤波器系数由df
base
系数进行插值或抽样产生,其方向与目标k的轴线方向相同,如图2所示。
[0084]
(62)可以看出,疑似目标k与候选匹配目标之间差异越大,表示匹配系数越大;越小,表示疑似目标k与候选匹配目标越相似,在所有满足(thrr为一个统计量,根据任务不同,设计也不同,在本例中为2~5)的候选匹配目标集中,选择匹配系数值最小的候选匹配目标为k所匹配的候选目标即认为候选目标与疑似目标k为同一目标,可通过当前帧与上一帧位置的变化计算出目标k的运动方向及速度,在此基础上将目标的类型、编号保持不变、目标尺寸、轨迹集、速度、运动方向特征于掩模处更新,并消除掩模处的历史特征信息;若不存在匹配系数小于thrr的目标,同样认为该目标为新出现目标,则其建立新编号,并在掩模处将目标的编号、尺寸、轨迹进行更新。
[0085]
(7)在完成当前帧图像i
t
检测后,利用掩模m完成对当前帧对应的背景图像中疑似目标及真实目标对应的像素值更新,更新原则为:
[0086][0087]
上式中,λ为背景更新系数,一般为(0.7~0.9)之间,表示根据掩膜集合,从当前帧图像i
t
中提取出目标类型为背景或干扰目标的像素点的像素值保持不变,其余像点(疑似目标与真实目标像素点)的像素值至零处理后获得的像素矩阵(背景、干扰目标、疑似目标以及真实目标所对应的像素点可以根据m{i}{1}与m{i}{3}的值得到)。表示在当前帧图像i
t
基础上,将疑似目标与真实目标所在对应的像素块整体替换为该目标所在邻域背景(邻域背景表示目标在图像i
t
中所在位置上下左右四个方向的背景像素)像素块,邻域背景像素块的大小取决于对应目标的大小,由目标切片周围上下左右四个相同大小的背景像素块平均加权得到,并将背景与干扰目标所对应的像素置零。
[0088]
(8)对于掩模集合中特征向量目标类型为疑似目标的元素,当目标在整个图像序列中出现的次数超过numd(一般为成像5~10s所对应的图像帧数)或目标轨迹停止更新超过numo(一般为成像10~15s所对应的图像帧数,即目标如果连续在10~15s图像序列中没有新的轨迹,判定该目标已消失)帧时,对其轨迹长度进行计算,若轨迹长度超过thr
track
(thr
track
取值范围为3~5,本发明实施例中为3,即目标移动超过3个像素),则将该元素的目标类型判定为真实目标,否则将其判定为干扰目标,并对掩模m进行更新,更新原则为:若为真实目标,于处更新目标类型、编号、外形特征、目标速度、运动方向;若为干扰目标,则只保留类型信息,特征向量m{i}{2}~m{i}{6}的值均为空,即:
[0089][0090]
(9)对于掩模集合中特征向量目标类型为真实目标的元素o
t
,当目标轨迹停止更新超过numo帧时,判定该目标运动完成,并将目标编号及轨迹加入到轨迹集track中。对于
新轨迹为第l条轨迹在第t帧图像中的坐标位置,tb(l)为第l条轨迹的起始出现帧,te(l)为第l条轨迹的末尾出现帧。当新轨迹track(l+1)加入到轨迹集中时,根据轨迹中结束轨迹点的运动速度和方向进行轨迹预测,得到其在相应新轨迹中的预测位置,通过与新轨迹的起始位置和新旧两个轨迹对应目标的运动速度及方向进行比对,从而完成目标的完整跟踪。
[0091]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。在不冲突的情况下,本技术实施例以及实施例中的技术特征可以相互组合。
[0092]
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1