PolSAR图像舰船检测联合优化方法及系统
polsar图像舰船检测联合优化方法及系统
技术领域
1.本发明涉及地理空间信息系统技术领域,主要涉及一种polsar图像舰船检测联合优化方法及系统。
背景技术:
2.极化信息应用到合成孔径雷达sar系统所构成polsar系统保留了更完整的目标电磁散射特性,成为现代雷达成像技术的重要工具,目前已广泛应用在军事侦察、地形测绘、环境与自然灾害监视、海面舰船目标检测等领域。然而随着雷达平台参数多样性、海况环境复杂性的影响,复杂海杂波建模与估计、慢小目标检测、密集目标检测等仍然是当前polsar图像舰船目标检测的难点问题。
3.在面对复杂海况的情况下,使用单一的舰船检测器往往不能全面有效的检测目标并保留细节,现有技术中,通常使用多种极化检测器进行检测,每种检测器提取一种单一特征,来区分舰船目标和海洋杂波,然而单一特征难以全面的反映海况信息。因此如何有效地结合这些不同检测器,获取全面有效信息是亟待解决的问题。
技术实现要素:
4.为解决上述技术问题,本发明提供了一种polsar图像舰船检测联合优化方法,包括以下步骤:步骤s1:分析已标注舰船目标的polsar图像,得到训练集、训练集中检测像素点的极化协方矩阵c以及先验信息,所述先验信息为杂波协方差矩阵σc和目标协方差矩阵σ
t
;所述训练集中的检测像素点包括目标像素点和杂波像素点;步骤s2:通过所述先验信息,构造n个不同的极化检测器,并应用于所述训练集,对所述目标像素点和杂波像素点进行处理,将每个所述极化检测器的结果作为一维特征,联合生成高维度的目标数据集x
t
和杂波数据集xc;步骤s3:利用改进的监督分类器lda算法,构建联合极化检测器jd-all,并绘制检测性能roc曲线;步骤s4:将n个所述极化检测器进行两两相互组合,构建x个二联合极化监测器jd-2,并绘制检测性能roc曲线,将所述x个二联合极化监测器jd-2的检测性能roc曲线与联合极化检测器jd-all的检测性能roc曲线进行对比分析,得到与所述联合极化检测器jd-all性能最为接近的最优二联合极化监测器jd-2;步骤s5:对所述最优二联合极化监测器jd-2进行优化,得到深度联合检测器djd,并利用所述深度联合检测器djd对待检测的polsar图像进行检测,得到检测结果。
5.优选地,步骤s1中训练集的目标像素点和杂波像素点不足时,基于所述先验信息,通过蒙特卡洛仿真方式进行补充。
6.优选地,步骤s3包括以下步骤:步骤s31:通过改进的监督分类器lda算法,计算对应于联合极化检测器jd-all的
投影矩阵g,具体算法如下所示:式中,r
t
、rc分别为x
t
、xc的互相关矩阵;r
sc
、r
tc
分别为x
t
、xc的协方差矩阵,β表示平衡因子,ghg=i表示正则化约束,tr表示矩阵求迹函数;步骤s32:通过极化检测公式z=tr(gc),计算所述联合极化检测器jd-all的检测结果,式中z表示联合极化检测器jd-all的输出结果,c表示检测像素点的极化协方矩阵,tr表示矩阵求迹函数;步骤s33:根据所述检测结果,由低到高调整门限,绘制所述联合极化检测器jd-all检测性能roc曲线。
7.优选地,步骤s4包括以下步骤:步骤s41:将n个所述极化检测器进行两两相互结合,得到x个二联合极化监测器jd-2,并通过步骤s3的方法,绘制x个与所述二联合极化监测器jd-2对应的检测性能roc曲线;步骤s42:将x个所述二联合极化监测器jd-2的检测性能roc曲线与所述联合极化检测器jd-all的检测性能roc曲线进行比较,选取最接近的二联合极化监测器jd-2作为最优二联合极化监测器jd-2。
8.优选地,步骤s42中,检测性能roc曲线的比较方法为:选取位于上方的检测性能roc曲线。
9.优选地,步骤s5包括以下步骤:步骤s51:设定所述最优二联合极化监测器jd-2中两个极化检测器的参考系数α、η;步骤s52:通过遗传算法优化α、η参数,构建深度联合检测器djd。
10.优选地,步骤s52包括以下步骤:步骤s521:设定α和η的限定关系:α
²
+η
²
=1α:η=1:-(max(b)+min(b))/2式中,b表示的特征值;步骤s522:通过所述最优二联合极化监测器jd-2,确定其中两个极化检测器分别对应的变换矩阵a和b,并通过公式z=tr(gc),计算对应于杂波数据集的杂波输出值和对应于目标数据集的目标输出值;步骤s523:通过所述杂波输出值的范围确定门限范围,将门限递增,得到roc曲线,将roc曲线下面积auc最大作为优化目标;步骤s524:通过遗传算法,基于所述优化目标,优化参数α和η,构建深度联合检测器djd,所述深度联合检测器djd的变换矩阵p=αa+ηb。
11.本发明还提供了一种polsar图像舰船检测联合优化系统,包括信息采集模块、极化检测器构建模块、极化检测器联合模块、性能分析模块、深度优化模块和检测模块;
所述信息采集模块,用于分析polsar图像,构建训练集、训练集中检测像素点的极化协方矩阵和先验信息,并输入所述极化检测器构建模块,所述训练集中检测像素点包括目标像素点和杂波像素点;所述极化检测器构建模块,用于构建n个不同的极化检测器,并应用于所述训练集,得到目标数据集和杂波数据集;所述极化检测器联合模块:用于利用改进的监督分类器lda方法,构建联合极化检测器jd-all,以及将所述n个极化检测器进行两两相互结合,构建x个二联合极化监测器jd-2;所述性能分析模块,用于分析所述联合极化检测器jd-all和x个二联合极化监测器jd-2的性能,选取与所述联合极化检测器jd-all性能最为接近的最优二联合极化监测器jd-2;所述深度优化模块,用于使用遗传算法对所述最优二联合极化监测器jd-2进行优化,构建深度联合检测器djd;所述检测模块,通过深度联合检测器djd对polsar图像复杂海况区域进行舰船目标检测,得到检测结果。
12.优选地,所述信息采集模块中,当所述训练集的目标像素点和杂波像素点不足时,基于所述先验信息,通过蒙特卡洛仿真方式进行补充。
13.优选地,所述深度优化模块,通过设定最优二联合极化监测器jd-2中两个极化检测器的系数α和η,确定限定关系,通过遗传算法,优化参数α和η,构建深度联合检测器djd。
14.与最接近的现有技术相比,本发明提供的技术方案具有如下有益效果:改进的监督分类器lda方法,它寻求一种空间变换,使得在某种意义下类间分离性最大,类内分离性最小或相异性最小。改进的监督分类器lda将高维的模式样本投影到最佳鉴别矢量空间,以达到抽取分类信息和压缩特征空间维数的效果,投影后保证模式样本在新的子空间有最大的类间距离和最小的类内距离,即模式在该空间中有最佳的可分离性。
15.在此基础上,本发明将全体组合而成的联合极化检测器jd-all作为对比量,将不同极化检测器两两组合,找到主要贡献组合,这样可以减少实际polsar图像处理中的运算量。在找到主要贡献组合最优二联合极化监测器jd-2之后,对最优二联合极化监测器jd-2的系数进行深度优化,以监督分类器lda得到的系数为初值,通过遗传算法进行寻优,能够在二联合极化监测器优势的基础上进一步的得到检测性能的突破,形成深度联合检测器djd。深度联合检测器djd在复杂海况下能够发挥良好的作用。在星载极化合成孔径雷达polsar海面检测问题上,性能有较大提高,具有明显的民用及军用价值。
附图说明
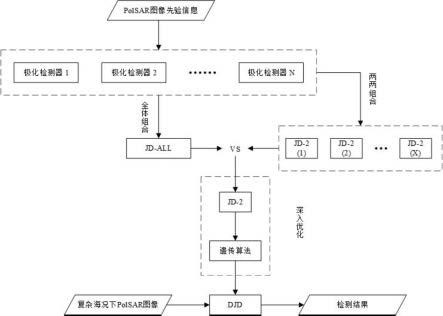
16.图1为本发明的方法流程示意图;图2为radarsat-2卫星的某海域polsar图像;图3为图2中待检测区域通过djd提取的检测结果图;图4为本发明实施例中的检测性能roc曲线图。
具体实施方式
17.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
18.在本发明实施例中使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本发明。在本发明实施例和所附权利要求书中所使用的单数形式的“一种”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
19.如图1所示,为本发明提出的一种polsar图像舰船检测联合优化方法流程示意图,包括以下步骤:步骤s1:如图2所示,表示radarsat-2卫星的某海域polsar图像,分析polsar图像,得到训练集、训练集中检测像素点的极化协方矩阵c以及先验信息,先验信息包括杂波协方差矩阵σc和目标协方差矩阵σt,训练集中的检查像素点包括目标像素点和杂波像素点。
20.本发明实施例中,当训练集样本不足时,基于先验信息,通过蒙特卡洛仿真方式补充原始训练集中的目标和杂波样本,以完善训练集,保证训练的结果更加的精准。
21.步骤s2:通过先验信息,构造n个不同的极化检测器,如pdof、apdof、evd、pwf、pmf等,并应用于训练集,对目标像素点和杂波像素点进行处理,将每个极化检测器的结果作为一维特征,联合生成高维度的目标数据集x
t
,杂波数据集xc;目标数据集x
t
,杂波数据集xc的每一个样本为高维矢量,维度数等于单个极化检测器个数n,将已有的训练集,转换为数据集,这样,便于之后的运算,减少运算消耗。
22.步骤s3:利用改进的监督分类器lda算法,构建联合极化检测器jd-all,并绘制检测性能roc曲线;通过改进的lda算法计算对应于联合极化检测器jd-all的投影矩阵g,g为厄米特矩阵,可以表示理解为某个线性变换与自身的共轭相乘,具体算法如下所示:式中,r
t
、rc分别为x
t
、xc的互相关矩阵;r
sc
、r
tc
分别为x
t
、xc的协方差矩阵,b表示平衡因子,ghg=i表示正则化约束。
23.其中,构建的联合极化检测器jd-all具有子空间投影性能,可以投影到最大信杂比子空间,进一步提升目标检测性能。
24.通过极化检测公式z=tr(gc),计算联合极化检测器jd-all的检测结果,式中z表示jd-all输出结果,tr表示矩阵求迹函数,根据检测结果,由低到高调整门限,绘制联合极化检测器jd-all检测性能roc曲线。
25.步骤s4:将n个极化检测器两两相互组合,构建x个二联合极化监测器jd-2,并绘制对应的检测性能roc曲线,分析得到与联合极化检测器jd-all性能最为接近的最优二联合极化监测器jd-2,这样可以提取联合极化检测器jd-all中的主要贡献者。
26.具体地,将n个极化检测器两两相互结合,重复步骤s3,得到x个二联合极化监测器jd-2和x个对应的检测性能roc曲线;将x个二联合极化监测器jd-2的检测性能roc曲线与联合极化检测器jd-all的检测性能roc曲线进行比较,得到最优二联合极化监测器jd-2,roc
曲线的比较方法为:位于上方的roc曲线性能好。
27.如图4所示,除开最上面的一条曲线,为本发明实施例九个二联合极化化检测器jd-2的检测性能roc曲线;在此从下往上依次对本图进行说明:第一条为二联合极化化检测器rs的检测性能roc曲线;第二条为二联合极化化检测器pnf的检测性能roc曲线;第三条为二联合极化化检测器opd和二联合极化化检测器pwf的检测性能roc曲线;第四条为二联合极化化检测器joint-1、二联合极化化检测器joint-2、二联合极化化检测器joint-3和二联合极化化检测器joint-4检测性能roc曲线;第五条为二联合极化化检测器spdof-apdof的检测性能roc曲线;其中第四条曲线和第五条曲线部分重合,第五条曲线略高于第四条曲线;可以看出,本发明实施例中二联合极化化检测器spdof-apdof的性能最为优越,最接近联合极化检测器jd-all的监测性能,是本实施例中的主要贡献者,因此本发明实施例选取spdof-apdof为最优二联合极化监测器jd-2。
28.步骤s5:对最优二联合极化监测器jd-2进行优化,得到深度联合检测器djd,并利用深度联合检测器djd对polsar图像进行检测,得到检测结果。
29.步骤s51:设定最优二联合极化监测器jd-2中两个极化检测器的参考系数α、η;步骤s52:通过遗传算法优化α、η参数,得到djd检测器。
30.步骤s521:设定α和η的限定关系:α
²
+η
²
=1α:η=1:-(max(b)+min(b))/2式中,b表示的特征值;步骤s522:通过最优二联合极化监测器jd-2,确定其中两个极化检测器分别对应的变换矩阵a和b,并通过公式z=tr(gc),计算对应于杂波数据集的杂波输出值和对应于目标数据集的目标输出值步骤s523:通过杂波输出值的范围确定门限范围,将门限递增,绘制roc曲线,以曲线下面积auc最大为优化目标;步骤s524:通过遗传算法,基于优化目标优化参数α和η,得到深度联合检测器djd的变换矩阵p=αa+ηb。
31.如图3所示,为深度联合检测器djd提取的检测结果图,叉表示虚警,其余图案表示舰船,可以看出通过djd检测器对polsar图像复杂海况区域进行舰船目标检测, 11个目标全部提取,并发现了原数据集中难以发现的小目标,得到的结果准确,性能优越。
32.本发明还提供了一种polsar图像舰船检测联合优化系统,包括信息采集模块、极化检测器构建模块、极化检测器联合模块、性能分析模块、深度优化模块和检测模块;所述信息采集模块,用于分析polsar图像,构建训练集、训练集中检测像素点的极化协方矩阵和先验信息,并输入所述极化检测器构建模块,所述训练集中检测像素点包括目标像素点和杂波像素点;
所述极化检测器构建模块,用于构建n个不同的极化检测器,并应用于所述训练集,得到目标数据集和杂波数据集;所述极化检测器联合模块:用于利用改进的监督分类器lda方法,构建联合极化检测器jd-all,以及将所述n个极化检测器进行两两相互结合,构建x个二联合极化监测器jd-2;所述性能分析模块,用于分析所述联合极化检测器jd-all和x个二联合极化监测器jd-2的性能,选取与所述联合极化检测器jd-all性能最为接近的最优二联合极化监测器jd-2;所述深度优化模块,用于使用遗传算法对所述最优二联合极化监测器jd-2进行优化,构建深度联合检测器djd;所述检测模块,通过深度联合检测器djd对polsar图像复杂海况区域进行舰船目标检测,得到检测结果。
33.优选地,所述信息采集模块中,当所述训练集的目标像素点和杂波像素点不足时,基于所述先验信息,通过蒙特卡洛仿真方式进行补充。
34.优选地,所述深度优化模块,通过设定最优二联合极化监测器jd-2中两个极化检测器的系数α和η,确定限定关系,通过遗传算法,优化参数α和η,构建深度联合检测器djd。
35.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,仅表达了本发明的较佳实施例而已,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
36.应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1