一种考虑蜗舌影响的蜗壳设计方法
1.本发明涉及径流叶轮机械领域,尤其涉及一种考虑蜗舌影响的蜗壳设计方法。
背景技术:
2.径流叶轮机械被广泛应用于社会生产和生活中,如常见的离心压气机、离心泵、离心风机、向心涡轮以及部分水轮机等等。径流叶轮机械最主要的组成部分为转子和蜗壳,蜗壳在离心式叶轮机械中起到周向收集流体和扩压流体的作用,在向心式叶轮机械中起到分配流体和加速流体的作用。蜗壳的设计水平会直接影响径流叶轮机械的工作效率、可靠性以及振动和噪声水平等各项指标。目前径流叶轮机械的设计水平已遇到瓶颈,难以实现性能的大幅提升,尤其是蜗壳的设计水平相对转子而言比较落后,阻碍了径流叶轮机械整体性能的提升。
3.现有向心涡轮蜗壳的设计方法包括一维方法和二维方法,这两种方法都假定蜗壳出口质量流量或速度周向均匀分布,忽略了蜗舌引起的周向非均匀性,增大了蜗壳下游转子入口流动参数不均匀程度,导致转子更容易发生高周疲劳,减少使用寿命。
技术实现要素:
4.本发明提供一种考虑蜗舌影响的蜗壳设计方法,以减弱蜗舌对转子入口流动参数的影响,防止转子叶片高周疲劳的发生,延长涡轮的使用寿命。
5.为了实现上述目的,本发明的技术方案是:
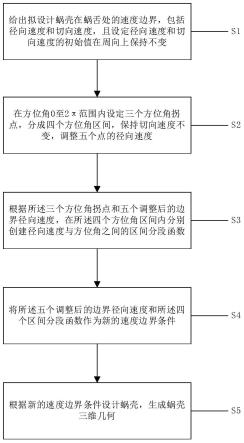
6.一种考虑蜗舌影响的蜗壳设计方法,包括以下步骤:
7.步骤1、给出拟设计蜗壳在蜗舌处的速度边界,包括径向速度和切向速度,且设定径向速度和切向速度的初始值在周向上保持不变;
8.步骤2、在方位角0至2π的范围内设定三个方位角拐点,分成四个方位角区间,保持切向速度不变,调整方位角在0、2π和三个方位角拐点的径向速度;
9.所述径向速度的调整方案为:
10.在方位角为0处,将初始径向速度增大作为第一边界径向速度;
11.在方位角为第一拐点处,将初始径向速度减小作为第二边界径向速度;
12.在方位角为第二拐点处,保持初始径向速度不变作为第三边界径向速度;
13.在方位角为第三拐点处,保持初始径向速度不变作为第四边界径向速度;
14.在方位角为2π处,将初始径向速度增大作为第五边界径向速度;
15.步骤3、根据所述三个方位角拐点和调整后的五个边界径向速度,在所述四个方位角区间内分别创建径向速度与方位角之间的区间分段函数;
16.所述分段函数的创建方案为:
17.在方位角为0至第一拐点之间,创建第一区间分段函数;
18.在方位角为第一拐点至第二拐点之间,创建第二区间分段函数;
19.在方位角为第二拐点至第三拐点之间,创建第三区间分段函数;
20.在方位角为第三拐点至2π之间,创建第四区间分段函数;
21.步骤4、将所述调整后的五个边界径向速度和所述四个区间分段函数作为新的速度边界条件;
22.步骤5、根据新的速度边界条件设计蜗壳,生成蜗壳三维几何。
23.进一步地,所述步骤2中三个方位角拐点的取值范围包括:
24.第一方位角拐点θ1为15至20度;
25.第二方位角拐点θ2为50至60度;
26.第三方位角拐点θ3为345至350度。
27.进一步地,所述步骤2中更改边界径向速度的数值范围包括:
28.在方位角为0处,边界径向速度为初始径向速度的1至2倍;
29.在方位角为第一拐点处,边界径向速度为初始径向速度的0.5至1倍;
30.在方位角为第二拐点处,边界径向速度等于初始径向速度;
31.在方位角为第三拐点处,边界径向速度等于初始径向速度;
32.在方位角为2π处,边界径向速度为初始径向速度的1至2倍。
33.进一步地,所述步骤3中使用的分段函数包括线性函数:
34.方位角范围为0~θ1时的径向速度:
[0035][0036]
方位角范围为θ1~θ2时的径向速度:
[0037][0038]
方位角范围为θ2~θ3时的径向速度:
[0039]v3
=vr;
[0040]
方位角范围为θ3~2π时的径向速度:
[0041][0042]
其中:θ为方位角自变量;θ1、θ2和θ3分别为方位角的第一拐点、第二拐点和第三拐点;为方位角为0时的边界径向速度,为方位角θ1处的边界径向速度,为方位角为2π时的边界径向速度;vr为初始径向速度。
[0043]
进一步地,所述步骤3中使用的分段函数还包括幂函数:
[0044]
方位角范围为0至时的径向速度:
[0045][0046]
方位角范围为至θ1时的径向速度:
[0047][0048]
方位角范围为θ1~θ2时的径向速度:
[0049][0050]
方位角范围为θ2~θ3时的径向速度:
[0051]v4
=vr;
[0052]
方位角范围为θ3~2π时的径向速度:
[0053][0054]
其中:θ为方位角自变量;θ1、θ2和θ3分别为方位角的第一拐点、第二拐点和第三拐点;为方位角为0时的边界径向速度,为方位角θ1处的边界径向速度,为方位角为2π时的边界径向速度;vr为初始径向速度。
[0055]
进一步地,所述步骤3中使用的分段函数还包括三角函数:
[0056]
方位角范围为0至θ1时的径向速度:
[0057][0058]
方位角范围为θ1~θ2时的径向速度:
[0059][0060]
方位角范围为θ2~θ3时的径向速度:
[0061]v3
=vr;
[0062]
方位角范围为θ3~2π时的径向速度:
[0063][0064]
其中:θ为方位角自变量;θ1、θ2和θ3分别为方位角的第一拐点、第二拐点和第三拐点;为方位角为0时的边界径向速度,为方位角θ1处的边界径向速度,为方位角为2π时的边界径向速度;vr为初始径向速度。
[0065]
有益效果:本发明涉及一种考虑蜗舌影响的蜗壳设计方法,通过在现有二维设计方法的基础上,考虑蜗舌对气流参数的影响,改变蜗舌前后的径向速度分布,使气流参数更加均匀,防止转子出现高周疲劳,提高涡轮使用寿命。
附图说明
[0066]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0067]
图1为现有技术中一维蜗壳设计示意图;
[0068]
图2为现有技术中二维蜗壳设计方法的蜗壳a/r周向分布示意图;
[0069]
图3为现有技术中二维方法设计的某蜗壳出口气流角周向分布图;
[0070]
图4为本发明公开的考虑蜗舌影响的蜗壳设计方法流程图;
[0071]
图5为采用本发明公开方法的径向速度周向分布图;
[0072]
图6为两种方法设计的蜗壳a/r周向分布对比图;
[0073]
图6a为方位角0至90度a/r周向分布对比图;
[0074]
图6b为方位角300度至360度a/r周向分布对比图;
[0075]
图7a为使用现有技术创建的100个蜗壳截面示意图;
[0076]
图7b为采用本发明方法创建的100个蜗壳截面示意图;
[0077]
图8为无叶轮情况下两种方法蜗壳出口气流角周向分布对比图;
[0078]
图9为有叶轮情况下两种方法蜗壳出口气流角周向分布对比图。
具体实施方式
[0079]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0080]
现有向心涡轮蜗壳设计方法包括一维设计方法和二维设计方法,如图1所示,一维蜗壳设计方法在设计过程中只考虑了工质沿蜗壳截面形心的流动,黑色带箭头的实线为工质流动方向,图中a为蜗壳某处的截面面积,r为蜗壳截面形心半径,通过假设蜗壳出口质量流量周向均匀分布和角动量守恒,可以确定蜗壳截面面积a和截面形心半径r的比值a/r与方位角θ的关系,但一维方法只能获得一条线性的a/r分布曲线,不能确定蜗壳截面的形状。
[0081]
向心涡轮蜗壳二维设计方法根据质量守恒、能量守恒、角动量守恒以及流线方程等基本方程,并考虑蜗壳轴向宽度,可以直接生成蜗壳三维模型。与一维方法相同的是,二维方法也假设蜗壳出口质量流量或速度周向均匀分布,但由于求解时考虑了工质密度的变化,此时会得到一条略微上凸的a/r曲线,如图2所示。
[0082]
一维方法和二维方法中假定蜗壳出口质量流量周向均匀分布,一是为了简化设计,二是为了使设计出的蜗壳出口流动参数均匀,以降低蜗壳下游转子受到的激振力。但这一假设忽略了蜗舌的影响,设计出的蜗壳并不能获得预期的效果。以二维设计方法为例,在无叶轮的情况下对图2描述的蜗壳进行三维cfd仿真计算,获得蜗壳出口位置的气流角随方位角周向分布图,如图3所示,在方位角为2π前即靠近蜗舌时,气流角快速增大,但经过蜗舌后,气流角又急剧下降,这一现象会导致涡轮转子入口气流参数的剧烈波动,增加叶片的激振力,容易引发叶片的高周疲劳。
[0083]
实施例1
[0084]
本实施例提供了一种考虑蜗舌影响的蜗壳设计方法,如图4所示,包括以下步骤:
[0085]
步骤1、给出拟设计蜗壳在蜗舌处的速度边界,包括径向速度和切向速度,且设定径向速度和切向速度的初始值在周向上保持不变;
[0086]
步骤2、在方位角0至2π的范围内设定三个方位角拐点,分成四个方位角区间,保持切向速度不变,调整方位角在0、2π和三个方位角拐点的径向速度;
[0087]
所述径向速度的调整方案为:
[0088]
在方位角为0处,将初始径向速度增大作为第一边界径向速度;
[0089]
在方位角为第一拐点处,将初始径向速度减小作为第二边界径向速度;
[0090]
在方位角为第二拐点处,保持初始径向速度不变作为第三边界径向速度;
[0091]
在方位角为第三拐点处,保持初始径向速度不变作为第四边界径向速度;
[0092]
在方位角为2π处,将初始径向速度增大作为第五边界径向速度;
[0093]
步骤3、根据所述三个方位角拐点和调整后的五个边界径向速度,在所述四个方位角区间内分别创建径向速度与方位角之间的区间分段函数;
[0094]
所述分段函数的创建方案为:
[0095]
在方位角为0至第一拐点之间,创建第一区间分段函数;
[0096]
在方位角为第一拐点至第二拐点之间,创建第二区间分段函数;
[0097]
在方位角为第二拐点至第三拐点之间,创建第三区间分段函数;
[0098]
在方位角为第三拐点至2π之间,创建第四区间分段函数;
[0099]
步骤4、将所述调整后的五个边界径向速度和所述四个区间分段函数作为新的速度边界条件;
[0100]
步骤5、根据新的速度边界条件设计蜗壳,生成蜗壳三维几何。
[0101]
在本实施例中,所述三个方位角拐点的取值范围包括:
[0102]
第一方位角拐点θ1为15至20度;
[0103]
第二方位角拐点θ2为50至60度;
[0104]
第三方位角拐点θ3为345至350度。
[0105]
在本实施例中,所述边界径向速度更改后的数值范围包括:
[0106]
在方位角为0处,边界径向速度为初始径向速度的1至2倍;
[0107]
在方位角为第一拐点处,边界径向速度为初始径向速度的0.5至1倍;
[0108]
在方位角为第二拐点处,边界径向速度等于初始径向速度;
[0109]
在方位角为第三拐点处,边界径向速度等于初始径向速度;
[0110]
在方位角为2π处,边界径向速度为初始径向速度的1至2倍。
[0111]
具体地,初次尝试时,三个方位角拐点可先取最大值,然后再根据实际情况进行调整。考虑到蜗舌对转子入口气流参数的影响后,在蜗舌处前后改变径向速度的初始值,可以有效减弱气流角随方位角的变化剧烈程度。
[0112]
在本实施例中,所述调整径向速度的具体函数方程包括但不限于以下方案:
[0113]
(1)线性函数:
[0114]
方位角范围为0~θ1时的径向速度:
[0115][0116]
方位角范围为θ1~θ2时的径向速度:
[0117][0118]
方位角范围为θ2~θ3时的径向速度:
[0119]v3
=vr;
[0120]
方位角范围为θ3至2π时的径向速度:
[0121][0122]
(2)幂函数:
[0123]
方位角范围为0至时的径向速度:
[0124][0125]
方位角范围为至θ1时的径向速度:
[0126][0127]
方位角范围为θ1~θ2时的径向速度:
[0128][0129]
方位角范围为θ2~θ3时的径向速度:
[0130]v4
=vr;
[0131]
方位角范围为θ3至2π时的径向速度:
[0132][0133]
(3)三角函数:
[0134]
方位角范围为0至θ1时的径向速度:
[0135][0136]
方位角范围为θ1~θ2时的径向速度:
[0137][0138]
方位角范围为θ2~θ3时的径向速度:
[0139]v3
=vr;
[0140]
方位角范围为θ3至2π时的径向速度:
[0141][0142]
其中:θ为方位角自变量;θ1、θ2和θ3分别为方位角的第一拐点、第二拐点和第三拐点;为方位角为0时的边界径向速度,为方位角θ1处的边界径向速度,为方位角为2π时的边界径向速度;vr为初始径向速度。
[0143]
在本实施例中,列举出的所有函数类别和具体形式,都可以在具体设计过程中混合使用,且可以实现径向速度递增功能和递减功能的函数形式不尽其数,以上各函数形式仅用于说明本发明的技术方案,并非对其限制,函数的具体类型或具体形式可根据不同实际情况在设计过程中进行调整修改。
[0144]
实施例2
[0145]
在本实施例中,对本发明所述技术方案给出一个优选案例:
[0146]
对径向速度进行调整,其中参数设定:
[0147]
三个方位角拐点分别为:θ1=20
°
,θ2=60
°
,θ3=350
°
;
[0148]
方位角为0处的边界径向速度
[0149]
方位角为θ1处的边界径向速度
[0150]
方位角为2π处的边界径向速度
[0151]
在本实施例中,使用的函数方程为:
[0152]
方位角在0至θ1区间时,求径向速度的变化曲线使用三角函数,公式如下:
[0153][0154]
方位角在θ1至θ2区间时,求径向速度的变化曲线使用幂函数,公式如下:
[0155][0156]
方位角在θ2至θ3区间时,径向速度为常数,即:
[0157]v3
=vr;
[0158]
方位角在θ3至2π区间时,求径向速度的变化曲线使用幂函数,公式如下:
[0159][0160]
以上各段函数方程为本发明建议的选择方案,将设定好的参数代入上述四个区间分段函数中,此时设定的初始径向速度为无量纲化参数,即vr=1;如图5所示,得出径向速度沿周向的分布示意图。
[0161]
具体地,根据上述速度边界条件设计蜗壳,得到蜗壳的a/r曲线,如图6所示。两个蜗壳的最大和最小a/r均相同。如图6a和图6b中所示,与原方法设计的蜗壳相比,本发明设计的蜗壳的a/r曲线在开始时会较快速的减小,然后均匀变化,最后在2π之前再次较快的减小,即与原方法相比,本发明的a/r曲线在两端变化较快,这一变化来自径向速度边界条件的改变。
[0162]
具体地,在本实施例中,如图7a和图7b所示,为两种方法生成的蜗壳截面图,图7a和图7b中各截面对应的方位角相同,图7a为使用现有技术创建的100个蜗壳截面示意图,即径向速度从0至2π范围内均保持不变;图7b为采用本发明方法创建的100个蜗壳截面示意图,其中最大的几个截面和最小的几个截面,都变化的更快,与a/r曲线一致。
[0163]
具体地,在本实施例中,为了检验新蜗壳的效果,比较了两个蜗壳的气流角分布,如图8所示,为没有叶轮的情况下两个蜗壳出口的气流角周向分布,从图中可见,本发明设计出的蜗壳在蜗舌前后的跳动明显减小,其中最大气流角降幅约为4
°
,而最小气流角降幅约为2
°
,因此蜗舌前后跳动量减小约2
°
。
[0164]
具体地,在本实施例中,为了更准确地比较气流角的变化,进一步在有叶轮的情况下进行了蜗壳出口气流角的对比,如图9所示,为某工况下的稳态计算结果,气流角在蜗舌处和叶片处都会增加,该涡轮共11个叶片。通过对比发现,本发明设计的蜗壳在蜗舌前后流动角上下波动约为12
°
,而原方法为17
°
,即波动减小约为5
°
。
[0165]
在具体实施时,可根据实际情况的不同,调整方位角拐点、初始径向速度以及边界径向速度的取值,使蜗舌前后的工质流动参数更稳定,即转子入口的工质流动状态更均匀,可以减小转子受到的激振力,降低高周疲劳的发生,提高涡轮的使用寿命和工作效率。
[0166]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依
然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1