目标定位方法及相关系统、存储介质与流程
本技术涉及定位,尤其涉及一种目标定位方法及相关系统、存储介质。
背景技术:
1、随着科技的不断发展,自动驾驶以及移动机器人等具有较大市场规模。在移动机器人或者自动驾驶中,定位是一件十分重要的基础性工作。但要实现高精度、高鲁棒性、高性价比的定位方式是一件非常有挑战性的事情。价格高昂的单传感器可以较好地解决定位问题,比如较高级别的惯性测量单元(inertial measurement unit,imu)。但考虑到大多数场景对高成本是排斥的,单纯依赖价格昂贵的高精传感器的解决方案的适用场景较少。所以低成本的多传感器融合是一个较为可行的覆盖更多场景的解决方案。激光雷达lidar、视觉摄像头camera、惯性测量单元imu、轮式里程计、雷达radar、全球定位系统(globalpositioning system,gps)等多种传感器具有各自的优缺点,也具有多种排列组合。常见的lidar+imu的融合算法难以解决回环检测和重定位问题;常见的camera+imu的融合算法难以解决精确的深度估计问题;常见的lidar+camera+imu算法并没有做到真正的多传感器紧耦合;为了应对雨雪雾天气,在lidar+camera+imu等常规传感器组合的基础上专门增加radar传感器的成本又较高。特定场景可能让某些传感器失效(比如变电站场景存在强烈的电磁干扰,让gps或实时动态载波相位差分技术(real-time kinematic,rtk)的定位误差变得极大;比如路面颠簸可能让轮式里程计打滑和磨损,导致机器人长时间巡检的累计误差越大;再如空旷场景的回波反射少,可能让激光雷达无法探测到有效的特征点;再如雨、雾、雪等场景下,lidar、camera等多种传感器都会发生严重的性能退化,导致机器人无法识别自己的准确位姿。因此,如何研发出高精度、高鲁棒性、高性价比的多传感器融合定位算法是整个行业面临的巨大挑战。
技术实现思路
1、本技术公开了一种目标定位方法及相关系统、存储介质,可以实现对目标进行高精度、高鲁棒性、高性价比的定位。
2、第一方面,本技术实施例提供一种目标定位方法,包括:
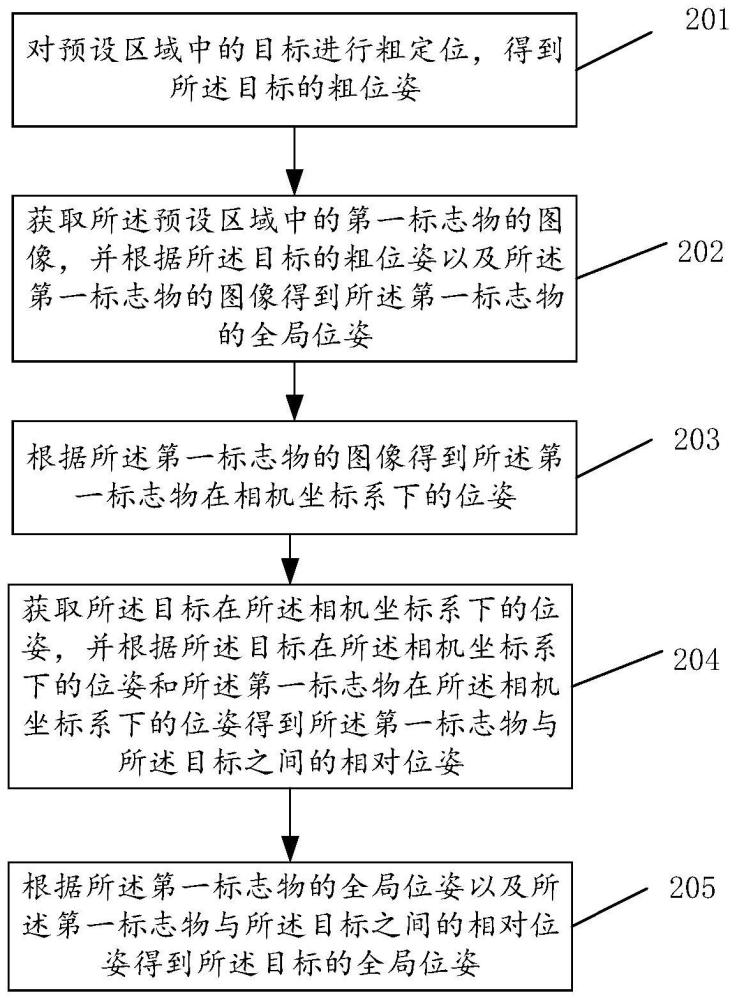
3、对预设区域中的目标进行粗定位,得到所述目标的粗位姿;
4、获取所述预设区域中的第一标志物的图像,并根据所述目标的粗位姿以及所述第一标志物的图像得到所述第一标志物的全局位姿;
5、根据所述第一标志物的图像得到所述第一标志物在相机坐标系下的位姿;
6、获取所述目标在所述相机坐标系下的位姿,并根据所述目标在所述相机坐标系下的位姿和所述第一标志物在所述相机坐标系下的位姿得到所述第一标志物与所述目标之间的相对位姿;
7、根据所述第一标志物的全局位姿以及所述第一标志物与所述目标之间的相对位姿得到所述目标的全局位姿。
8、本技术实施例,车辆、机器人或者服务器等通过先对目标(如无人驾驶车辆、机器人等)进行粗定位,然后基于第一标志物的图像和目标的粗位姿得到第一标志物的全局位姿,并根据目标在相机坐标系下的位姿和第一标志物在相机坐标系下的位姿得到第一标志物与目标之间的相对位姿,进而根据第一标志物的全局位姿以及第一标志物与目标之间的相对位姿得到目标的全局位姿。采用该手段,先对目标进行粗定位,再结合第一标志物的图像以及该粗位姿对目标进行精定位,这样可以有助于获得超高精度的目标的全局位姿估计。
9、例如,上述粗定位是基于激光雷达来进行的,精定位是基于视觉摄像头进行的。本方案先进行基于激光雷达的粗定位,再进行基于视觉摄像头的精定位,其中激光雷达定位的精度在5-10cm,视觉精定位可以做到1-2cm左右的定位精度。激光雷达粗定位和视觉精定位的结合,可以满足客户的需求,且可以实现对目标进行高精度、高鲁棒性、高性价比的定位。
10、在一种可能的实现方式中,所述根据所述目标的粗位姿以及所述第一标志物的图像得到所述第一标志物的全局位姿,包括:
11、根据所述目标的粗位姿和所述预设区域的全局点云地图,得到所述目标所在位置的局部地图;
12、根据所述目标所在位置的局部地图和语义定位全局地图得到语义定位局部地图,所述语义定位全局地图中包括m个标志物的全局位姿,所述语义定位局部地图中包括n个标志物的全局位姿,所述n个标志物为所述m个标志物中的标志物,m和n均为正整数;
13、根据所述第一标志物的图像从所述语义定位局部地图中获取所述第一标志物的全局位姿。
14、通过先使用激光雷达进行粗定位,可以满足视觉精定位需要标志物在画面中大于1/10的最低运行要求;否则如果只使用视觉精定位模块的话,无法满足视觉精定位的最低启动要求。本方案先进行基于激光雷达的粗定位,再进行基于视觉摄像头的精定位,其中激光雷达定位的精度在5-10cm,很难满足客户的1-2cm的高精定位需求,而视觉精定位可以做到1-2cm左右的定位精度。激光雷达粗定位和视觉精定位的结合,可以满足客户的需求,且可以实现对目标进行高精度、高鲁棒性、高性价比的定位。
15、另一方面,通过语义定位局部地图来查找标志物的全局位姿,由于可能标志物很多,通过进一步缩减范围进行查找,使得标志物的全局位姿估计的精度更高,提高目标定位的效率。
16、在一种可能的实现方式中,所述方法还包括:
17、根据所述第一标志物的图像对所述图像中的m个标志物进行三维重建,以得到所述m个标志物的带有纹理的三维模型;
18、将所述m个标志物的带有纹理的三维模型配准至所述全局点云地图中,以得到所述语义定位全局地图。
19、其中,语义定位全局地图可以是在离线模式建立的,然后采用在线模式对目标进行定位。采用离线模块与在线模块分离的方式,可以极大地减少在线模块的算力消耗,使得例如车辆或机器人的硬件成本大大降低、续航大大提升。
20、在一种可能的实现方式中,所述根据所述第一标志物的图像得到所述第一标志物在相机坐标系下的位姿,包括:
21、将所述第一标志物的图像输入至预设模型中进行处理,得到所述第一标志物在相机坐标系下的位姿,其中,所述预设模型的训练数据是通过将初始训练图像数据中的背景进行替换、高斯模糊、平移、裁剪、对比度变换、gamma变换、放大、缩小中的一项或多项处理,和/或,对所述初始训练图像数据中的标志物进行高斯模糊、平移、裁剪、对比度变换、gamma变换、放大、缩小中的一项或多项处理得到的。
22、通过扩增训练数据来训练模型,使得获取到的标志物与所述目标之间的相对位姿更加精准,鲁棒性更高。
23、第二方面,本技术实施例提供一种目标定位装置,包括:
24、粗定位模块,用于对预设区域中的目标进行粗定位,得到所述目标的粗位姿;
25、第一处理模块,用于获取所述预设区域中的第一标志物的图像,并根据所述目标的粗位姿以及所述第一标志物的图像得到所述第一标志物的全局位姿;
26、第二处理模块,用于根据所述第一标志物的图像得到所述第一标志物在相机坐标系下的位姿;
27、第三处理模块,用于获取所述目标在所述相机坐标系下的位姿,并根据所述目标在所述相机坐标系下的位姿和所述第一标志物在所述相机坐标系下的位姿得到所述第一标志物与所述目标之间的相对位姿;
28、定位模块,用于根据所述第一标志物的全局位姿以及所述第一标志物与所述目标之间的相对位姿得到所述目标的全局位姿。
29、本技术实施例,车辆、机器人或者服务器等通过先对目标(如无人驾驶车辆、机器人等)进行粗定位,然后基于第一标志物的图像和目标的粗位姿得到第一标志物的全局位姿,并根据目标在相机坐标系下的位姿和第一标志物在相机坐标系下的位姿得到第一标志物与目标之间的相对位姿,进而根据第一标志物的全局位姿以及第一标志物与目标之间的相对位姿得到目标的全局位姿。采用该手段,先对目标进行粗定位,再结合第一标志物的图像以及该粗位姿对目标进行精定位,这样可以有助于获得超高精度的目标的全局位姿估计。
30、例如,上述粗定位是基于激光雷达来进行的,精定位是基于视觉摄像头进行的。本方案先进行基于激光雷达的粗定位,再进行基于视觉摄像头的精定位,其中激光雷达定位的精度在5-10cm,视觉精定位可以做到1-2cm左右的定位精度。激光雷达粗定位和视觉精定位的结合,可以满足客户的需求,且可以实现对目标进行高精度、高鲁棒性、高性价比的定位。
31、在一种可能的实现方式中,所述第一处理模块,用于:
32、根据所述目标的粗位姿和所述预设区域的全局点云地图,得到所述目标所在位置的局部地图;
33、根据所述目标所在位置的局部地图和语义定位全局地图得到语义定位局部地图,所述语义定位全局地图中包括m个标志物的全局位姿,所述语义定位局部地图中包括n个标志物的全局位姿,所述n个标志物为所述m个标志物中的标志物,m和n均为正整数;
34、根据所述第一标志物的图像从所述语义定位局部地图中获取所述第一标志物的全局位姿。
35、在一种可能的实现方式中,所述装置还包括第四处理模块,用于:
36、根据所述第一标志物的图像对所述图像中的m个标志物进行三维重建,以得到所述m个标志物的带有纹理的三维模型;
37、将所述m个标志物的带有纹理的三维模型配准至所述全局点云地图中,以得到所述语义定位全局地图。
38、在一种可能的实现方式中,所述第二处理模块,还用于:
39、将所述第一标志物的图像输入至预设模型中进行处理,得到所述第一标志物在相机坐标系下的位姿,其中,所述预设模型的训练数据是通过将初始训练图像数据中的背景进行替换、高斯模糊、平移、裁剪、对比度变换、gamma变换、放大、缩小中的一项或多项处理,和/或,对所述初始训练图像数据中的标志物进行高斯模糊、平移、裁剪、对比度变换、gamma变换、放大、缩小中的一项或多项处理得到的。
40、第三方面,本技术提供了一种计算设备集群,包括至少一个计算设备,每个计算设备包括处理器和存储器;其中,所述至少一个计算设备的处理器用于执行所述至少一个计算设备的存储器中存储的指令,以使得所述计算设备集群执行如第一方面任一种可能的实施方式提供的方法。
41、第四方面,本技术提供了一种计算机存储介质,包括计算机指令,当所述计算机指令在电子设备上运行时,使得所述电子设备执行如第一方面任一种可能的实施方式提供的方法。
42、第五方面,本技术实施例提供一种计算机程序产品,当计算机程序产品在计算机上运行时,使得计算机执行如第一方面任一种可能的实施方式提供的方法。
43、可以理解地,上述提供的第二方面所述的装置、第三方面所述的计算设备集群、第四方面所述的计算机存储介质或者第五方面所述的计算机程序产品均用于执行第一方面中任一所提供的方法。因此,其所能达到的有益效果可参考对应方法中的有益效果,此处不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!