一种基于VA仿真计算汽车前雨刮刮刷面积的方法及系统与流程
一种基于va仿真计算汽车前雨刮刮刷面积的方法及系统
技术领域
1.本发明涉及车辆开发技术领域,更具体地,涉及一种基于va仿真计算汽车前雨刮刮刷面积的方法、系统、电子设备及存储介质。
背景技术:
2.汽车前雨刮是保证汽车安全的零部件,为车辆在雨雪天气下提供风窗玻璃清洗、清洁功能,避免视野遮挡的情况,且有效地清除雨水、雪和污垢,能在高温(摄氏零上80度)和低温下(摄氏零下30度)工作;所以雨刮清洗的面积及其与前挡风玻璃的干涉深度就尤为重要。目前前雨刮能清洗到的面积及其与前挡风玻璃的干涉深度=雨刮理论运动包络+经验值,其中经验值里面主要是汽车前雨刮安装相关零件精度+由于温度变化导致零件热胀冷缩导致的变形量,其中汽车前雨刮安装相关零件精度这个影响因素可以通过va软件在汽车设计阶段计算出来。
3.为充分体现前雨刮的功能,在汽车设计前期阶段就需要准确的模拟出前雨刮能清洗到的面积及其与前挡风玻璃的干涉深度,目前行业内设计前雨刮与前挡风玻璃的搭接面积还是通过雨刮理论运动包络加上经验公差和变形,这样只能初步确定雨刮起到作用,还有雨刮与a柱不干涉。因此,有必要涉及一种计算汽车前雨刮刮刷面积的计算方法,以获得更加准确的汽车前雨刮安装相关零件精度,以提升汽车前雨刮的性能。
技术实现要素:
4.本发明针对现有技术中存在的技术问题,提供一种基于va仿真计算汽车前雨刮刮刷面积的方法、系统、电子设备及存储介质,可在保证前雨刮不与周边零部件相干涉的前提下设计更大的清洗范围,保证车辆的视野范围,提升客户体验。
5.根据本发明的第一方面,提供了一种基于va仿真计算汽车前雨刮刮刷面积的方法,包括:
6.基于三维仿真软件的几何模型对结构件分层,形成结构树;依据结构树的层级关系,将结构树第二层的结构件依次装配并设定各装配点的公差,得到结构树第一层的前雨刮安装仿真模型;
7.运转前雨刮、使前雨刮交替置于其两端极限位置,通过前雨刮的理论运动包络、各装配点的公差及各结构件的变形量计算前雨刮在极限位置的公差;
8.根据前雨刮在极限位置的公差判断前雨刮与周边结构件的干涉情况;通过前雨刮的理论运动包络、前雨刮在极限位置的公差以及各结构件的变形量计算车辆前雨刮的刮刷面积。
9.在上述技术方案的基础上,本发明还可以作出如下改进。
10.可选的,所述根据前雨刮在极限位置的公差判断前雨刮与周边结构件的干涉情况,包括:
11.根据前雨刮在极限位置的公差获得前雨刮运动过程的三维坐标轨迹,通过前雨刮
运动过程的三维坐标轨迹以及周边结构件的坐标计算前雨刮与周边结构件的最小距离;
12.若所述最小距离大于预设的干涉距离阈值,则判断前雨刮与周边结构件相干涉;若所述最小距离不大于预设的干涉距离阈值,则判断前雨刮与周边结构件不干涉。
13.可选的,所述基于三维仿真软件的几何模型对结构件分层,形成结构树,包括:
14.基于三维仿真软件的车辆几何模型,将前雨刮安装仿真模型所需的全部仿真结构件分为两层,其中,第一层为前雨刮安装仿真模型,第一层包含第二层的全部结构件要素,第二层包括车身总成、机舱连接板焊接总成、雨刮电机、前挡风玻璃、第一前雨刮和第二前雨刮。
15.可选的,所述依据结构树的层级关系,将结构树第二层的结构件依次装配并设定各装配点的公差,得到结构树第一层的前雨刮安装仿真模型,包括:
16.将机舱连接板焊接总成通过多点装配的方式安装到车身总成上,限定机舱连接板焊接总成在车身总成上各安装点的公差,得到车身及安装件总成一;
17.将雨刮电机通过多点装配的方式安装到车身及安装件总成一上,限定雨刮电机在车身及安装件总成一上各安装点的公差,得到车身及安装件总成二;
18.将前挡风玻璃通过胶合结合多点装配的方式安装到车身及安装件总成二上,限定前挡风玻璃在车身及安装件总成二上各装配点的公差,得到车身及安装件总成三;
19.将第一前雨刮的一端安装在雨刮电机上、第一前雨刮的另一端与前挡风玻璃贴紧,运转第一前雨刮到达其自身两端极限位置,通过第一前雨刮的理论运动包络面积、各装配点的公差及各结构件基于当前温度的变形量计算第一前雨刮在极限位置的公差;
20.将第二前雨刮的一端安装在雨刮电机上、第二前雨刮的另一端与前挡风玻璃贴紧,运转第二前雨刮到达其自身两端极限位置,通过第二前雨刮的理论运动包络面积、各装配点的公差及各结构件基于当前温度的变形量计算第二前雨刮在极限位置的公差。
21.可选的,所述将雨刮电机通过多点装配的方式安装到车身及安装件总成一上,限定雨刮电机在车身及安装件总成一上各安装点的公差,得到车身及安装件总成二;包括:
22.将雨刮电机通过多个螺栓连接点装配到车身及安装件总成一的机舱连接板焊接总成或车身总成上,通过多个螺栓连接点限制所述雨刮电机的六自由度,为雨刮电机在车身及安装件总成一上各螺栓连接点输入公差,得到车身及安装件总成二。
23.可选的,所述通过前雨刮的理论运动包络、各装配点的公差及各结构件的变形量计算前雨刮在极限位置的公差;包括:
24.将第一前雨刮安装就位后,根据材料特性计算前挡风玻璃以及第一前雨刮在预设温度值下的变形量,将前挡风玻璃的变形量以及第一前雨刮的变形量补偿到第一前雨刮的理论运动包络中、以修正第一前雨刮的运动轨迹;
25.结合第一前雨刮运动过程中各装配点的公差范围、通过前雨刮安装仿真模型模拟第一前雨刮的运动轨迹,得到第一前雨刮在其运动包络两端的极限位置的公差;
26.将第二前雨刮安装就位后,根据材料特性计算前挡风玻璃以及第二前雨刮在预设温度值下的变形量,将前挡风玻璃的变形量以及第二前雨刮的变形量补偿到第二前雨刮的理论运动包络中、以修正第二前雨刮的运动轨迹;
27.结合第二前雨刮运动过程中各装配点的公差范围、通过前雨刮安装仿真模型模拟第二前雨刮的运动轨迹,得到第二前雨刮在其运动包络两端的极限位置的公差。
28.可选的,通过前雨刮的理论运动包络、前雨刮在极限位置的公差以及各结构件的变形量计算车辆前雨刮的刮刷面积,包括:
29.将第一前雨刮在其运动包络两端极限位置的公差增加到第一前雨刮的理论运动包络上,结合前挡风玻璃以及第一前雨刮基于温度变化的变形量,得到第一前雨刮的刮刷面积;
30.将第二前雨刮在其运动包络两端极限位置的公差增加到第二前雨刮的理论运动包络上,结合前挡风玻璃以及第二前雨刮基于温度变化的变形量,得到第二前雨刮的刮刷面积;
31.将第一前雨刮的刮刷面积与第二前雨刮的刮刷面积相加、再减去第一前雨刮与第二前雨刮的重叠面积,得到车辆前雨刮的刮刷面积。
32.根据本发明的第二方面,提供一种基于va仿真计算汽车前雨刮刮刷面积的系统,包括:
33.模型构建模块,用于基于三维仿真软件的几何模型对结构件分层,形成结构树;依据结构树的层级关系,将结构树第二层的结构件依次装配并设定各装配点的公差,得到结构树第一层的前雨刮安装仿真模型,所述前雨刮安装仿真模型包括两个前雨刮;
34.雨刮公差获取模块,用于依次运转两个前雨刮、使每个前雨刮交替置于其两端极限位置,通过每个前雨刮的理论运动包络面积、各装配点的公差及各结构件的变形量分别计算每个前雨刮在极限位置的公差;
35.面积计算模块,用于根据前雨刮在极限位置的公差判断前雨刮与周边结构件的干涉情况;通过两个前雨刮的理论运动包络面积、两个前雨刮在极限位置的公差以及各结构件的变形量计算车辆前雨刮的刮刷面积。
36.根据本发明的第三方面,提供了一种电子设备,包括存储器、处理器,所述处理器用于执行存储器中存储的计算机管理类程序时实现一种基于va仿真计算汽车前雨刮刮刷面积的方法的步骤。
37.根据本发明的第四方面,提供了一种计算机可读存储介质,其上存储有计算机管理类程序,所述计算机管理类程序被处理器执行时实现一种基于va仿真计算汽车前雨刮刮刷面积的方法的步骤。
38.本发明提供的一种基于va仿真计算汽车前雨刮刮刷面积的方法、系统、电子设备及存储介质,提出了计算车辆前雨刮运动安装公差的va仿真方法,在设计阶段便可以更为准确地得到雨刮的清洗面积(即刮刷面积),这样便可以在保证雨刮不与周边零部件干涉的情况下设计更大的清洗范围,保证客户的视野范围,增强客户的开车体验。
附图说明
39.图1为本发明提供的一种基于va仿真计算汽车前雨刮刮刷面积的方法流程图;
40.图2为本发明提供的结构树层级关系示意图;
41.图3为本发明提供的前雨刮安装仿真模型的装配流程示意图;
42.图4(a)~(e)为本发明提供的结构树第二层的结构件结构示意图;
43.图5为本发明提供的车身及安装件总成一装配关系示意图;
44.图6为本发明提供的车身及安装件总成二装配关系示意图;
45.图7为本发明提供的车身及安装件总成三装配关系示意图;
46.图8为本发明提供的车身及安装件总成四装配关系示意图;
47.图9为本发明提供的第一前雨刮的运动包络示意图;
48.图10为本发明提供的第一前雨刮与第二前雨刮的运动包络示意图;
49.图11为本发明提供的一种基于va仿真计算汽车前雨刮刮刷面积的系统组成框图;
50.图12为本发明提供的一种可能的电子设备的硬件结构示意图;
51.图13为本发明提供的一种可能的计算机可读存储介质的硬件结构示意图。
52.附图中,各标号所代表的部件列表如下:
53.1、车身总成,2、机舱连接板焊接总成,3、雨刮电机,4、前挡风玻璃,5、第一前雨刮,6、第二前雨刮;a、第一前雨刮的刮刷面积,b、第二前雨刮的刮刷面积,c、第一前雨刮与第二前雨刮的重叠面积。
具体实施方式
54.下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
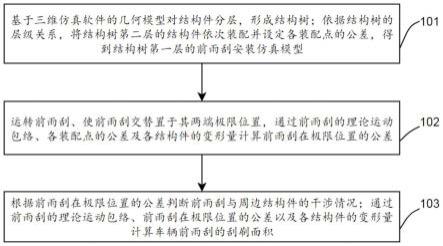
55.图1为本发明提供的一种基于va仿真计算汽车前雨刮刮刷面积的方法流程图,如图1所示,方法包括:
56.101、基于三维仿真软件的几何模型对结构件分层,形成结构树;依据结构树的层级关系,将结构树第二层的结构件依次装配并设定各装配点的公差,得到结构树第一层的前雨刮安装仿真模型;
57.102、运转前雨刮、使前雨刮交替置于其两端极限位置,通过前雨刮的理论运动包络、各装配点的公差及各结构件的变形量计算前雨刮在极限位置的公差;
58.103、根据前雨刮在极限位置的公差判断前雨刮与周边结构件的干涉情况;通过前雨刮的理论运动包络、前雨刮在极限位置的公差以及各结构件的变形量计算车辆前雨刮的刮刷面积。
59.可以理解的是,基于背景技术中的缺陷,本发明实施例提出了一种基于va仿真计算汽车前雨刮刮刷面积的方法。本发明提出了计算车辆前雨刮运动安装公差的va仿真方法,构建前雨刮安装仿真模型的过程中,每一步装配均对装配点设置好对应的公差,通过模拟前雨刮的运动过程、结合各个装配点的公差范围以及各个结构件在不同温度变化下的变形量即可得到前雨刮的带有公差值的运动包络面积,从而得到设计阶段的较为准确的前雨刮对前挡风玻璃4的清洗面积。且可以通过前雨刮在极限位置的公差判断前雨刮与周边结构件的干涉情况,在设计即可避免前雨刮与周边结构件之间的干涉,保证了设计方案的可行性。本实施例在设计阶段便可以更为准确地得到雨刮的清洗面积(即刮刷面积),这样便可以在保证雨刮不与周边零部件干涉的情况下设计更大的清洗范围,保证客户的视野范围,增强客户的开车体验。
60.在一种可能的实施例方式中,步骤103中,所述根据前雨刮在极限位置的公差判断前雨刮与周边结构件的干涉情况,包括:
61.根据前雨刮在极限位置的公差获得前雨刮运动过程的三维坐标轨迹,通过前雨刮运动过程的三维坐标轨迹以及周边结构件的坐标计算前雨刮与周边结构件的最小距离;
62.若所述最小距离大于预设的干涉距离阈值,则判断前雨刮与周边结构件相干涉;若所述最小距离不大于预设的干涉距离阈值,则判断前雨刮与周边结构件不干涉。
63.可以理解的是,基于整车坐标系,通过本实施例的方案可以计算得到前雨刮相对于周边结构件的最小距离,通过此最小距离值判断当前的设计方案中前雨刮在试验过程中是否会与周边结构件发生干涉,预留的防干涉空间是否足够。在设计初期通过仿真模型对前雨刮的运动过程进行模拟,可提前验证涉及方案中前雨刮与周边结构件的干涉情况,缩短了开发周期,减少了后期开发的试验验证成本。
64.在一种可能的实施例方式中,步骤101中,所述基于三维仿真软件的几何模型对结构件分层,形成结构树,如图2所示为结构树的层级关系示意图,结构树包括:
65.基于三维仿真软件(例如catia)的车辆几何模型,将前雨刮安装仿真模型所需的全部仿真结构件分为两层,其中,第一层为前雨刮安装仿真模型,第一层包含第二层的全部结构件要素,第二层包括车身总成1、机舱连接板焊接总成2、雨刮电机3、前挡风玻璃4、第一前雨刮5和第二前雨刮6。如图4(a)~(e)所示为第二层结构件的结构示意图,其中图4(a)为车身总成1中与本发明相关部分的局部示意图,图4(b)为机舱连接板焊接总成2结构示意图,图4(c)为雨刮电机3结构示意图,图4(d)为前挡风玻璃4结构示意图,图4(e)为两个前雨刮的结构示意图。
66.可以理解的是,本实施例将三维仿真软件中的几何模型利用结构树分层设置,将整理好的结构件导入装配仿真模拟软件(例如3dcs)进行各结构件的装配关系约束,通过结构树的层级关系可以模拟验证各结构件的装配关系,从而设计出更优的装配方案。
67.在一种可能的实施例方式中,步骤101中,所述依据结构树的层级关系,将结构树第二层的结构件依次装配并设定各装配点的公差,得到结构树第一层的前雨刮安装仿真模型,如图3所示为前雨刮安装仿真模型的装配流程图,该装配流程具体包括:
68.如图5所示,将机舱连接板焊接总成2通过多点装配的方式安装到车身总成1上,限定机舱连接板焊接总成2在车身总成1上各安装点的公差,得到车身及安装件总成一;
69.可以理解的是,机舱连接板焊接总成2在一般车型中都是通过自定位的方式安装在车身上的,先把图5中左右两边各一个螺栓定位打紧,然后再打紧其余螺栓,在3dcs软件中可以通过“user-dll move”装配命令中的“auto bend”来模拟实现,安装模型如图5所示:参照整车坐标系,t1、t2、t3和t7为z向螺栓打紧点,控制3个自由度(z方向的移动、绕x轴、y轴转动),运用“auto bend”命令目的就是把4个打紧点的变形考虑进去;t4、t5为螺栓定位住机舱连接板焊接总成2安装的2个自由度(x方向移动、绕z轴转动),t6为定位机舱连接板焊接总成2安装的y向移动;机舱连接板焊接总成2安装便在软件中通过t1~t7限制了6个自由度。图5中t1~t7每个装配点都需要准确输入装配件的公差。
70.如图6所示,将雨刮电机3通过多点装配的方式安装到车身及安装件总成一上,限定雨刮电机3在车身及安装件总成一上各安装点的公差,得到车身及安装件总成二;
71.具体的,包括:将雨刮电机3通过多个螺栓连接点装配到车身及安装件总成一的机舱连接板焊接总成2或车身总成1上,通过多个螺栓连接点限制所述雨刮电机3的六自由度,为雨刮电机3在车身及安装件总成一上各螺栓连接点输入公差,得到车身及安装件总成二。
72.可以理解的是,雨刮电机3一般自定位安装,可以根据实际需要安装在机舱连接板焊接总成2或者车身上。当其安装在两者之上时,并且有3个安装点,可以运用3dcs软件中的“six-plane move”命令模拟此装配,安装模型如图6所示:t1、t2、t3为z向螺栓打紧点,控制3个自由度(z方向的移动、绕x轴、y轴转动),t4、t5为螺栓定位住雨刮电机3安装的2个自由度(x方向移动、绕z轴转动),t6为定位雨刮电机3安装的y向移动;雨刮电机3安装便在3dcs软件中通过t1~t6限制了6个自由度。然后给图6中t1~t6每个装配点输入其公差,这样便可让装配零件按照设计公差在相应区域进行运动。
73.如图7所示,将前挡风玻璃4通过胶合结合多点装配的方式安装到车身及安装件总成二上,限定前挡风玻璃4在车身及安装件总成二上各装配点的公差,得到车身及安装件总成三;
74.可以理解的是,前挡风玻璃4安装时,正常都是在前挡风玻璃4内部周圈涂一圈密封胶,然后扣在车身总成1上,主要z向定位是车身总成1上的左右侧围外板。车身顶盖外板上会开两个孔,前挡风玻璃4上部会对应做两个销子,在前挡风玻璃4扣上去的时候,这两个销子插进车身顶盖外板的孔里面,限制前挡风玻璃4沿x向滑动,前挡风玻璃4安装的y向主要是通过人工对中安装:工人通过眼睛观察,保证前挡风玻璃4与左右侧围之间的间隙大概一致。在3dcs软件中可以通过“user-dll move”装配命令中的“high point”来模拟实现,安装模型如图7所示:t1、t2、t3和t7为z向两件之间贴合点,控制3个自由度(z方向的移动、绕x轴、y轴转动),贴合时候只会贴合t1、t2、t3和t7中的3个最高点,另外一个没有贴合的通过增加胶或挤压来贴合,运用“high point”命令目的就是把这个过程考虑进去;t4、t5为销子定位住前挡风玻璃4安装的2个自由度(x方向移动、绕z轴转动),t6为定位前挡风玻璃4安装的y向移动;前挡风玻璃4安装便在软件中通过t1~t7限制了6个自由度。
75.如图8所示,将第一前雨刮5的一端安装在雨刮电机3上、第一前雨刮5的另一端与前挡风玻璃4贴紧,得到车身及安装件总成四;如图9所示,运转第一前雨刮5到达其自身两端极限位置,通过第一前雨刮5的理论运动包络面积、各装配点的公差及各结构件基于当前温度的变形量计算第一前雨刮5在极限位置的公差;
76.可以理解的是,第一前雨刮5的雨刮臂一端固定在雨刮电机3上,另外一端与前挡风玻璃4贴死,安装好后,通过程序运行雨刮电机3,第一前雨刮5便可以在前挡风玻璃4上往复刷洗前挡风玻璃4,雨刮臂会处于的极端位置便是第一前雨刮5在其运动包络的两端加上公差及变形的位置。当第一前雨刮5处于运动之前,运用“two point move”,其模型在3dcs中的建模如图8:点t1限制了第一前雨刮5的雨刮臂x、y方向移动,t1、t2一起联合作用限制了雨刮z向移动及x、y方向转动,通过两点装配限制了雨刮的5个自由度(绕z轴旋转没有限制)。装配好后,给t1~t2每个相关装配点输入公差。
77.如图9所示,第一前雨刮5的雨刮臂按照它的运动包络走到另外一端时,也是处于雨刮臂一端固定在雨刮电机3上、另外一端与前挡风玻璃4贴死的状态,此状态也是通过“two point move”模拟出来,其模型在3dcs中的建模如图9所示:点t1限制了雨刮臂x、y方向移动,t1、t2起联合作用限制了雨刮z向移动及x、y方向转动,通过两点装配限制了雨刮的5个自由度(绕z轴旋转没有限制)。装配好后,给t1~t2每个相关装配点输入公差。
78.通过以上图5~图9的步骤便可计算出第一前雨刮5的雨刮臂在两个极端状态下的公差,然后用同样的极端法计算出第二前雨刮6的雨刮臂的公差范围,如图10所示。
79.如图10所示,将第二前雨刮6的一端安装在雨刮电机3上、第二前雨刮6的另一端与前挡风玻璃4贴紧,得到前雨刮安装仿真模型;运转第二前雨刮6到达其自身两端极限位置,
通过第二前雨刮6的理论运动包络面积、各装配点的公差及各结构件基于当前温度的变形量计算第二前雨刮6在极限位置的公差。
80.可以理解的是,通过图5~图10的步骤分别计算得到了第一前雨刮5在极限位置的公差以及第二前雨刮6在极限位置的公差。
81.在一种可能的实施例方式中,所述通过前雨刮的理论运动包络、各装配点的公差及各结构件的变形量计算前雨刮在极限位置的公差;包括:
82.将第一前雨刮5安装就位后,根据材料特性计算前挡风玻璃4以及第一前雨刮5在预设温度值下的变形量,将前挡风玻璃4的变形量以及第一前雨刮5的变形量补偿到第一前雨刮5的理论运动包络中、以修正第一前雨刮5的运动轨迹;
83.结合第一前雨刮5运动过程中各装配点的公差范围、通过前雨刮安装仿真模型模拟第一前雨刮5的运动轨迹,得到第一前雨刮5在其运动包络两端的极限位置的公差;
84.将第二前雨刮6安装就位后,根据材料特性计算前挡风玻璃4以及第二前雨刮6在预设温度值下的变形量,将前挡风玻璃4的变形量以及第二前雨刮6的变形量补偿到第二前雨刮6的理论运动包络中、以修正第二前雨刮6的运动轨迹;
85.结合第二前雨刮6运动过程中各装配点的公差范围、通过前雨刮安装仿真模型模拟第二前雨刮6的运动轨迹,得到第二前雨刮6在其运动包络两端的极限位置的公差。
86.可以理解的是,通过本实施例的计算方法可以计算得到第一前雨刮5在其运动包络两端的极限位置的公差以及第二前雨刮6在其运动包络两端的极限位置的公差。
87.在一种可能的实施例方式中,通过前雨刮的理论运动包络、前雨刮在极限位置的公差以及各结构件的变形量计算车辆前雨刮的刮刷面积,包括:
88.将第一前雨刮5在其运动包络两端极限位置的公差增加到第一前雨刮5的理论运动包络上,结合前挡风玻璃4以及第一前雨刮5基于温度变化的变形量,得到第一前雨刮的刮刷面积a;
89.将第二前雨刮6在其运动包络两端极限位置的公差增加到第二前雨刮6的理论运动包络上,结合前挡风玻璃4以及第二前雨刮6基于温度变化的变形量,得到第二前雨刮的刮刷面积b;
90.将第一前雨刮的刮刷面积a与第二前雨刮的刮刷面积b相加、再减去第一前雨刮与第二前雨刮的重叠面积c,得到车辆前雨刮的刮刷面积。
91.图11为本发明实施例提供的一种基于va仿真计算汽车前雨刮刮刷面积的系统结构图,如图11所示,一种基于va仿真计算汽车前雨刮刮刷面积的系统,包括模型构建模块1110、雨刮公差获取模块1120和面积计算模块1130,其中:
92.1110模型构建模块,用于基于三维仿真软件的几何模型对结构件分层,形成结构树;依据结构树的层级关系,将结构树第二层的结构件依次装配并设定各装配点的公差,得到结构树第一层的前雨刮安装仿真模型,所述前雨刮安装仿真模型包括两个前雨刮;
93.1120雨刮公差获取模块,用于依次运转两个前雨刮、使每个前雨刮交替置于其两端极限位置,通过每个前雨刮的理论运动包络面积、各装配点的公差及各结构件的变形量分别计算每个前雨刮在极限位置的公差;
94.1130面积计算模块,用于根据前雨刮在极限位置的公差判断前雨刮与周边结构件的干涉情况;通过两个前雨刮的理论运动包络面积、两个前雨刮在极限位置的公差以及各
结构件的变形量计算车辆前雨刮的刮刷面积。
95.可以理解的是,本发明提供的一种基于va仿真计算汽车前雨刮刮刷面积的系统与前述各实施例提供的基于va仿真计算汽车前雨刮刮刷面积的方法相对应,基于va仿真计算汽车前雨刮刮刷面积的系统的相关技术特征可参考基于va仿真计算汽车前雨刮刮刷面积的方法的相关技术特征,在此不再赘述。
96.请参阅图12,图12为本发明实施例提供的电子设备的实施例示意图。如图12所示,本发明实施例提了一种电子设备,包括存储器1210、处理器1220及存储在存储器1210上并可在处理器1220上运行的计算机程序1211,处理器1220执行计算机程序1211时实现以下步骤:
97.基于三维仿真软件的几何模型对结构件分层,形成结构树;依据结构树的层级关系,将结构树第二层的结构件依次装配并设定各装配点的公差,得到结构树第一层的前雨刮安装仿真模型,所述前雨刮安装仿真模型包括两个前雨刮;
98.依次运转两个前雨刮、使每个前雨刮交替置于其两端极限位置,通过每个前雨刮的理论运动包络面积、各装配点的公差及各结构件的变形量分别计算每个前雨刮在极限位置的公差;
99.根据前雨刮在极限位置的公差判断前雨刮与周边结构件的干涉情况;通过两个前雨刮的理论运动包络面积、两个前雨刮在极限位置的公差以及各结构件的变形量计算车辆前雨刮的刮刷面积。
100.请参阅图13,图13为本发明提供的一种计算机可读存储介质的实施例示意图。如图13所示,本实施例提供了一种计算机可读存储介质1300,其上存储有计算机程序1311,该计算机程序1311被处理器执行时实现如下步骤:
101.基于三维仿真软件的几何模型对结构件分层,形成结构树;依据结构树的层级关系,将结构树第二层的结构件依次装配并设定各装配点的公差,得到结构树第一层的前雨刮安装仿真模型,所述前雨刮安装仿真模型包括两个前雨刮;
102.依次运转两个前雨刮、使每个前雨刮交替置于其两端极限位置,通过每个前雨刮的理论运动包络面积、各装配点的公差及各结构件的变形量分别计算每个前雨刮在极限位置的公差;
103.根据前雨刮在极限位置的公差判断前雨刮与周边结构件的干涉情况;通过两个前雨刮的理论运动包络面积、两个前雨刮在极限位置的公差以及各结构件的变形量计算车辆前雨刮的刮刷面积。
104.本发明实施例提供的一种基于va仿真计算汽车前雨刮刮刷面积的方法、系统、电子设备及存储介质,提出了计算车辆前雨刮运动安装公差的va仿真方法,在设计阶段便可以更为准确地得到雨刮的清洗面积(即刮刷面积),这样便可以在保证雨刮不与周边零部件干涉的情况下设计更大的清洗范围,保证客户的视野范围,增强客户的开车体验。作为进一步的扩展,后续还可在本发明方案的基础上计算出雨刮z向与前风挡搭接的理论间隙公差,更合理地设计出两者之间的干涉距离,保证雨刮运动中始终与前挡风玻璃4干涉,使雨刮一直起到清洗作用。
105.需要说明的是,在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详细描述的部分,可以参见其它实施例的相关描述。
106.本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
107.本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式计算机或者其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
108.这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
109.这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
110.尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。
111.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包括这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1