室内场景识别方法、相关设备及计算机可读存储介质与流程
本技术涉及图像处理,尤其涉及一种室内场景识别方法、相关设备及计算机可读存储介质。
背景技术:
1、随着信息技术和智能机器人的发展与普及,场景识别作为重要的研究内容,已成为计算机视觉和模式识别领域的重要研究问题。场景图像分类是依据一组给定的语义标签来对图像数据集进行自动分类。场景识别模型主要分为三大块:基于低级特征、基于中级特征、基于视觉词汇。所谓低级特征,即对场景图像提取全局或者分块的纹理、颜色等特征对场景图像进行分类,比如valiaya和szumme等人的研究,但是这种提取底层特征的方法只适用于比较简单的场景或者场景差别较大的图像场景(沙滩和蓝天、室内和室外等),因而人们又继续进行探索。david g提出了一种基于尺度空间的、具有图像缩放、旋转和仿射不变形的图像局部特征描述算子sift,dalal等人提出了hog图像局部特征,得到了高性能的底层特征。随着人们对图像识别研究领域的深入、人们逐渐发现仅仅提取底层特征不能有效解决语义鸿沟问题,因此构建中层特征作为一个新的研究思路,引起了广大研究者们的关注,其中最具代表性的是视觉词袋模型(bag of visual words,bow),但它是将图像表示成了一个无序局部特征集的特征包方法,忽略了所有的关于图像块的位置信息,为了解决这个问题,lazebnik等人提出一种基于空间金字塔匹配(spatial pyramid matching,spm)的方法来改进传统的bow模型,取得了较好的识别效果。
2、然而,申请人在研究中发现,当把上述方法应用在室内场景识别时,识别效果差。因此,如何提高室内场景的识别效果是亟需解决的技术问题。
技术实现思路
1、本技术实施例提供一种室内场景识别方法、相关设备及计算机可读存储介质,可以提高室内场景的识别效果。
2、第一方面,本技术实施例提供了一种室内场景识别方法,该方法可以包括如下步骤:
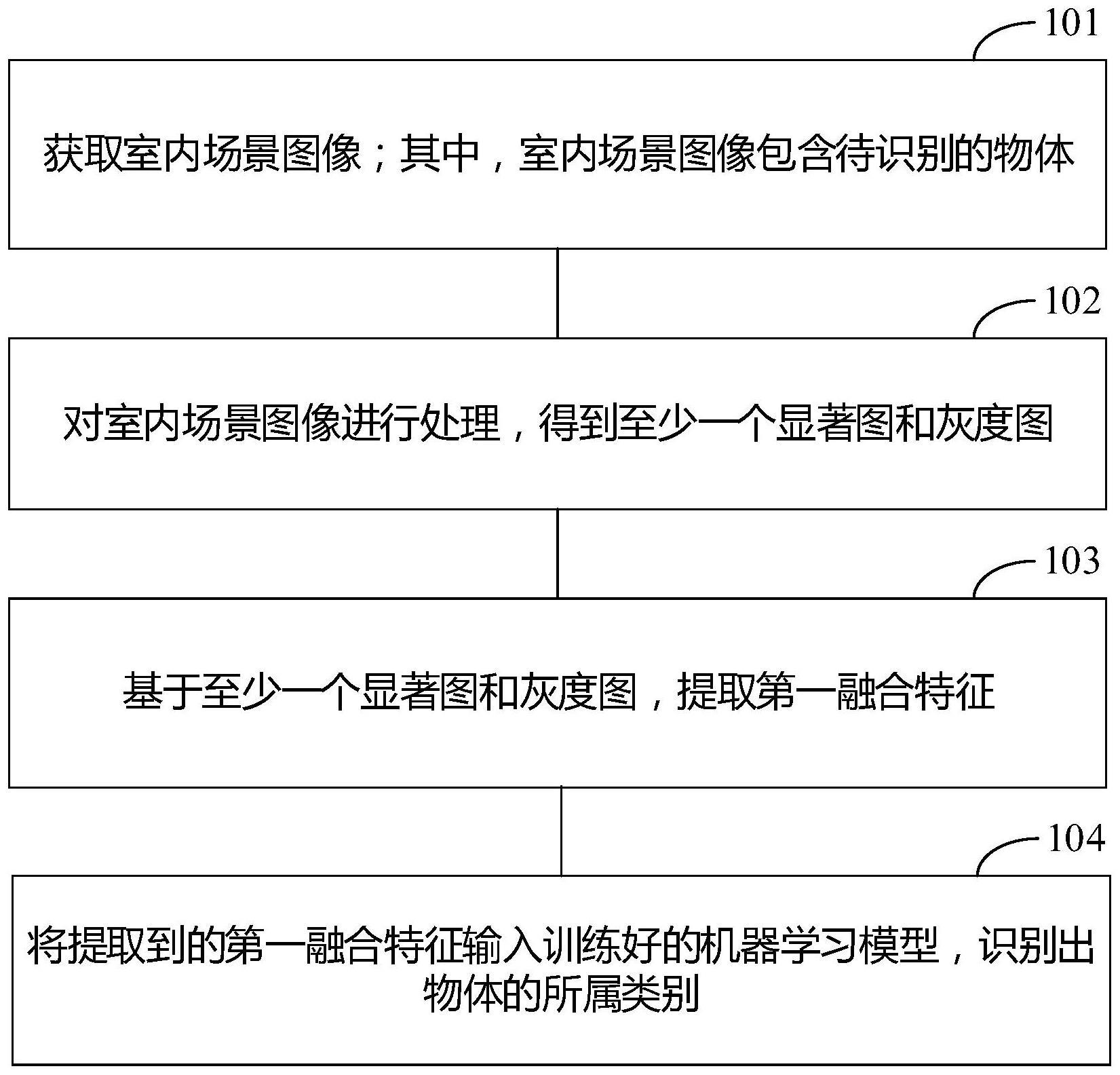
3、获取室内场景图像;其中,所述室内场景图像包含待识别的物体;
4、对所述室内场景图像进行处理,得到至少一个显著图和灰度图;
5、基于所述至少一个显著图和灰度图,提取第一融合特征;
6、将提取到的所述第一融合特征输入训练好的机器学习模型,识别出所述物体的所属类别。
7、在一种可能的实现方式中,所述至少一个显著图包括第一显著图,所述第一显著图为通过第一显著性检测算法处理得到的图像,所述第一显著性检测算法关联有第一显著性阈值;所述基于所述至少一个显著图和灰度图,提取第一融合特征,包括:
8、在所述第一显著图中,提取第一显著性特征;
9、在所述灰度图中,提取灰度特征;
10、将所述第一显著性特征与所述灰度特征进行拼接,得到所述第一融合特征。
11、在一种可能的实现方式中,所述至少一个显著图还包括第二显著图,所述第二显著图为通过第二显著性检测算法处理得到的图像,所述第二显著性检测算法关联有第二显著性阈值;所述第二显著性阈值小于所述第一显著性阈值;所述方法还包括:
12、在所述第二显著图中,提取第二显著性特征;
13、将所述第一显著性特征与所述灰度特征进行拼接,得到所述第一融合特征,包括:
14、将所述第一显著性特征与所述灰度特征进行拼接,得到第二融合特征;
15、将所述第二显著性特征与所述第二融合特征进行拼接,得到所述第一融合特征。
16、在一种可能的实现方式中,所述对所述室内场景图像进行处理,得到至少一个显著图,包括:
17、对所述室内场景图像进行多尺度分割,得到多尺度分割图像;
18、对所述多尺度分割图像进行区域显著性计算,得到不同尺度下的显著性;
19、基于所述不同尺度下的显著性,生成多尺度显著性子图;
20、将所述多尺度显著性子图进行融合,得到所述显著图。
21、在一种可能的实现方式中,所述训练好的机器学习模块包括稀疏字典;所述将提取到的所述第一融合特征输入训练好的机器学习模型,识别出所述物体的所属类别,包括:
22、利用所述稀疏字典对输入的所述第一融合特征进行稀疏表示,得到稀疏解;
23、根据所述稀疏解以及所输入的所述第一融合特征计算得到残差;
24、基于所述残差的大小判断所述物体的所属类别。
25、第二方面,本技术实施例提供了一种室内场景识别装置,该装置包括用于执行上述第一方面的方法的单元。具体地,该装置可以包括:
26、获取模块,用于获取室内场景图像;其中,所述室内场景图像包含待识别的物体;
27、图像处理模块,用于对所述室内场景图像进行处理,得到至少一个显著图和灰度图;
28、特征提取模块,用于基于所述至少一个显著图和灰度图,提取第一融合特征;
29、识别模块,用于将提取到的所述第一融合特征输入训练好的机器学习模型,识别出所述物体的所属类别。
30、在一种可能的实现方式中,所述至少一个显著图包括第一显著图,所述第一显著图为通过第一显著性检测算法处理得到的图像,所述第一显著性检测算法关联有第一显著性阈值;所述特征提取模块,具体用于:
31、在所述第一显著图中,提取第一显著性特征;
32、在所述灰度图中,提取灰度特征;
33、将所述第一显著性特征与所述灰度特征进行拼接,得到所述第一融合特征。
34、在一种可能的实现方式中,所述至少一个显著图还包括第二显著图,所述第二显著图为通过第二显著性检测算法处理得到的图像,所述第二显著性检测算法关联有第二显著性阈值;所述第二显著性阈值小于所述第一显著性阈值;
35、所述特征提取模块,还用于:
36、在所述第二显著图中,提取第二显著性特征;
37、将所述第一显著性特征与所述灰度特征进行拼接,得到第二融合特征;
38、将所述第二显著性特征与所述第二融合特征进行拼接,得到所述第一融合特征。
39、在一种可能的实现方式中,所述图像处理模块,具体用于:
40、对所述室内场景图像进行多尺度分割,得到多尺度分割图像;
41、对所述多尺度分割图像进行区域显著性计算,得到不同尺度下的显著性;
42、基于所述不同尺度下的显著性,生成多尺度显著性子图;
43、将所述多尺度显著性子图进行融合,得到所述显著图。
44、在一种可能的实现方式中,所述训练好的机器学习模块包括稀疏字典;所述识别模块,具体用于:
45、利用所述稀疏字典对输入的所述第一融合特征进行稀疏表示,得到稀疏解;
46、根据所述稀疏解以及所输入的所述第一融合特征计算得到残差;
47、基于所述残差的大小判断所述物体的所属类别。
48、第三方面,本技术实施例提供了一种计算机设备,包括处理器和存储器,所述处理器和存储器相互连接,其中,所述存储器用于存储支持计算机设备执行上述方法的计算机程序,所述计算机程序包括程序指令,所述处理器被配置用于调用所述程序指令,执行上述第一方面的方法。
49、第四方面,本技术实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序包括程序指令,所述程序指令当被处理器执行时使所述处理器执行上述第一方面的方法。
50、第五方面,本技术实施例还提供了一种计算机程序,所述计算机程序包括程序指令,所述程序指令当被处理器执行时使所述处理器执行上述第一方面的方法。
51、实施本技术实施例,由于第一融合特征指示了多种不同类型的图像之间的融合特性,解决了“语义鸿沟”的问题,以这种方式,可以提高室内场景的识别正确率。以及,采用稀疏表示法进行分类,解决了室内场景图像中特征提取方面丢失的一些特征信息以及室内场景图像存在的遮挡等噪声问题,提高了系统的识别率和对遮挡的鲁棒性。
52、上述说明仅是本发明实施例技术方案的概述,为了能够更清楚了解本发明实施例的技术手段,而可依照说明书的内容予以实施,并且为了让本发明实施例的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!