一种高空抛物溯源检测方法
1.本发明涉及一种溯源检测方法,属于视频信息处理领域。
背景技术:
2.随着现代生活的发展,土地这一宝贵的资源变得越来越重要;如何合理地利用土地这种宝贵的资源是我们今天必须要做的考虑,修建较高的楼层从而向上扩展生存空间是我们今天普遍的做法。这一点在大城市体现的更为直观;越来越多的高层建筑矗立在我们身边,我们也对这一现象司空见惯。但是,往往是容易被忽视角落中隐藏着危险。身边的高楼不经意间会成为伤害行人的“凶手”;近年来,因为高空抛物受伤的行人数不胜数;一个瓶子,一袋垃圾,一个晾衣架甚至一个烟头,从较高楼层被扔下时都会引起让人意想不到的结果;一瓶矿泉水从35楼被扔下来,尽管没有砸到人,但是它发出的声响将附近散步的老人吓倒摔成残疾,这是一个血淋淋的事实,高空抛物的危险程度让人不容忽视。
3.考虑到近年来发生的高空抛物行为案件,我国也对高空抛物这一行为做出了相关的法律规定;现在我们在处理高空抛物事件时可以做到有法可依;高空抛物责任人会被判处以危险方式危害公共安全的罪名;法律的进一步健全使得我们生命财产安全进一步有了保障;但是,高空抛物行为有着它自身的特点。高空决定了它发生地点一般为较高楼层,隐蔽性好,不容易被发现。而且有些责任人在较高楼层扔东西时并不会露出全部身体,他们往往故意隐去身子,扔完东西就离去。再加上抛物运动速度快,发生时间短,所以想要取得证据并不容易。这就使得我们处罚高空抛物行为真正责任人变得困难。有些情况下,执法部门很难追究抛物者的法律责任。在很多受害者伤势较为严重并且找不到真正责任人的情况下,执法部门会判决整个高楼中不能自证无责的用户都承担一定的责任。这也算是对于受害者的一些补偿。
4.基于现有状况,高空抛物行为虽然相比以前呈下降趋势,但是还是时有发生。一般情况下,人们会在高空抛物多发地点安装摄像头。摄像头可以帮助我们记录高空抛物发生时的影像资料,但是考虑到视频资源过多依靠人眼实时地去观察视频是不现实的。因此,我们需要一个效果良好的高空抛物的溯源检测系统来帮助我们在高空抛物发生时可以抓取抛物信息并且及时报警,同时记录现场留下证据。
技术实现要素:
5.本发明为解决目前无法自动地发现视频中的高空抛物并做出相应处理的问题,进而提出一种高空抛物溯源检测方法。
6.本发明为解决上述问题采取的技术方案是:本发明的具体步骤如下:
7.步骤一、建立追踪器链表,进行初始化操作;
8.步骤二、读入新的视频帧数据;
9.步骤三、对视频帧进行前景分割,获得二值图像后进行相应的滤波处理与形态学操作,然后对二值图像进行轮廓检测;
10.步骤四、在当前帧轮廓被提取后,对每一个轮廓进行判断是否在追踪器链表中存在已有目标;
11.步骤五、当追踪目标符合抛物的运动规律时,增加置信等级;设定阈值,当置信等级达到阈值时判断该目标为抛物,对设定为抛物的目标加入卡尔曼滤波追踪,进一步提高精度的同时,对因抛物目标运动过程中与背景色差过小造成的抛物目标丢失这一现象作出处理,利用卡尔曼滤波预测抛物目标在丢失帧时的位置,记录该位置用于下一次目标轮廓出现时的判断;
12.步骤六、遍历追踪器链表,将目标消失的追踪器去除;若该追踪器追踪的目标为抛物,则启动抛物回溯,把从目标出现到目标消失的视频帧上画出抛物位置并截取下来永久保存在视频文件中;同时在画图过程中将抛物运动信息保存在日志中;
13.步骤七、若有新的视频帧输入,则转向步骤二,否则结束。
14.进一步的,步骤四中对每一个轮廓进行判断是否在追踪器链表中存在已有目标,其判断的依据是该轮廓中心距离追踪器保留的位置不大于80像素,若存在则更新追踪器的信息,若不存在以该轮廓数据为初始点建立新的追踪器并入追踪器链表;同时为追踪器设置置信等级。
15.进一步的,步骤三中当天气为晴天时采用codebook背景建模方法完成前景分割;codebook背景建模方法的具体步骤为:
16.步骤(一)、利用一张图像初始化,为每个像素点建立一个码本结构,一个码本结构有包含多个码元结构,码元结构中存储着像素阈值信息、学习上下界信息、更新时间;把码元看作是对像素点历史信息的描述;设定处理帧数初始化为0;
17.步骤(二)、取一部分视频帧进行训练,对每个像素点,匹配该点像素值与它的码本中的码元像素阈值;如果没有匹配上,则新建码元加入该像素点码本;如果匹配上则更新码元的像素阈值信息;
18.步骤(三)、清除每个码本上多余的码元;
19.步骤(四)、利用训练好的码本对新输入的图像做背景差分,输出差分后的二值图像,处理帧数加一;
20.步骤(五)、若还有待处理的视频帧,处理帧数为达到阈值则转步骤(四),处理帧数达到阈值则转步骤(二),若没有待处理的视频帧则结束。
21.进一步的,对视频帧的处理中,首先对视频帧进行全局的高斯滤波处理,然后使用中值滤波去除噪点,然后使用膨胀操作使得图像更为连贯,最后使用均值滤波清除未连通区域。
22.进一步的,步骤三中当夜晚光照条件较差或雨雪天气时使用vibe前景分割技术,vibe前景分割技术的步骤如下:
23.步骤(一)、输入第一张图像初始化背景,为每一个像素点建立数组用来存储背景点像素值。背景初始化时用随机的策略从以当前像素点为中心的九宫格内选择像素值作为该像素点的初始背景值;
24.步骤(二)、前景分割与背景更新,输入一张图像,将其与背景像素值数组做匹配,匹配成功为背景点,然后该点有一定的概率更新该点的背景像素值,也有相同的概率随机更新该点一个邻域点的背景像素值。匹配不成功则为前景点,同时,若一像素点被判断为前
景点超过一定次数则认为是误判将其重新判定为背景点;
25.步骤(三)、输出结果图像;
26.步骤(四)、若还有待处理的视频帧则转步骤(二),否则结束。
27.进一步的,步骤三中轮廓检测的具体步骤如下:
28.步骤a、光栅扫描,从二值图像左上角像素点开始从左至右从上至下进行扫描直到当扫到外边界开始点;外边界开始点可以理解为抛物目标的外围轮廓上的点;对应二值图像上像素值为0的像素点到像素值为1的像素点中间的边界点;同时为每一个新发现的外边界起始点赋一个标记值;
29.步骤b、利用边界追踪算法得到该边界上所有像素点信息,把该轮廓并入到轮廓层级结构中;该算法维持的轮廓层级结构包括了从最大的轮廓到最内层轮廓的所有轮廓以及他们之间的内外关系;
30.步骤c、光栅扫描直到扫描到右下角像素点结束流程;此时所有轮廓信息都可以在轮廓层级结构中提取出来。
31.本发明的有益效果是:本发明可以自动地发现视频中的高空抛物并做出相应处理;本发明使用卡尔曼滤波器可以减小系统测量的误差,得到更精确的测量数据,另外使用卡尔曼滤波器,按照抛物物理运动轨迹建立模型,当出现抛物目标被判定为背景目标的情况时,采用卡尔曼滤波预测,可以将预测值作为抛物目标当前的位置信息继续进行下一步的匹配;本发明在正常的情况下可以抓取原始视频中抛物信息,并可以通过抛物信息截取出相应的高空抛物视频文件;本发明采用混合高斯前景分割技术,使得系统检测效果良好,拍摄清晰度较好;本发明使用了多种自适应方法对高空抛物视频进行了运动目标检测;然后再获得前景二值图像的基础上对其进行目标轮廓提取,记录抛物目标的所有运动轨迹信息,并通过卡尔曼滤波跟踪目标并减小运动目标检测过程中的误差与噪声;之后利用轨迹信息对目标进行抛物判断,符合抛物运动特征的运动目标被检测出为抛物;本发明根据时间和天气状况进行分割算法切换;天气条件很好的情况,使用混合高斯前景分割技术,夜晚光照条件较差的小雪天气情况,使用vibe前景分割技术。准确率上系统在简单场景准确率在90%以上,复杂场景下准确率在70%以上。
附图说明
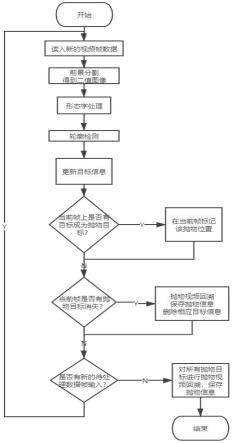
32.图1是本发明的流程框图;
33.图2是codebook背景建模方法流程框图;
34.图3是vibe背景建模方法流程图。
具体实施方式
35.具体实施方式一:结合图1说明本实施方式,本实施方式所述一种高空抛物溯源检测方法的具体步骤如下:
36.步骤一、建立追踪器链表,进行初始化操作;
37.步骤二、读入新的视频帧数据;
38.步骤三、对视频帧进行前景分割,获得二值图像后进行相应的滤波处理与形态学操作,然后对二值图像进行轮廓检测;
39.步骤四、在当前帧轮廓被提取后,对每一个轮廓进行判断是否在追踪器链表中存在已有目标;
40.步骤五、当追踪目标符合抛物的运动规律时,增加置信等级;设定阈值,当置信等级达到阈值时判断该目标为抛物,对设定为抛物的目标加入卡尔曼滤波追踪,进一步提高精度的同时,对因抛物目标运动过程中与背景色差过小造成的抛物目标丢失这一现象作出处理,利用卡尔曼滤波预测抛物目标在丢失帧时的位置,记录该位置用于下一次目标轮廓出现时的判断;
41.步骤六、遍历追踪器链表,将目标消失的追踪器去除;若该追踪器追踪的目标为抛物,则启动抛物回溯,把从目标出现到目标消失的视频帧上画出抛物位置并截取下来永久保存在视频文件中;同时在画图过程中将抛物运动信息保存在日志中;
42.步骤七、若有新的视频帧输入,则转向步骤二,否则结束。
43.具体实施方式二:结合图1说明本实施方式,本实施方式所述一种高空抛物溯源检测方法的步骤四中对每一个轮廓进行判断是否在追踪器链表中存在已有目标,其判断的依据是该轮廓中心距离追踪器保留的位置足不大于80像素,若存在则更新追踪器的信息,若不存在以该轮廓数据为初始点建立新的追踪器并入追踪器链表;同时为追踪器设置置信等级。
44.具体实施方式三:结合图2说明本实施方式,本实施方式所述一种高空抛物溯源检测方法的步骤三中当天气为晴天时采用codebook背景建模方法完成前景分割;codebook背景建模方法的具体步骤为:
45.步骤(一)、利用一张图像初始化,为每个像素点建立一个码本结构,一个码本结构有包含多个码元结构,码元结构中存储着像素阈值信息、学习上下界信息、更新时间;把码元看作是对像素点历史信息的描述;设定处理帧数初始化为0;
46.步骤(二)、取一部分视频帧进行训练,对每个像素点,匹配该点像素值与它的码本中的码元像素阈值;如果没有匹配上,则新建码元加入该像素点码本;如果匹配上则更新码元的像素阈值信息;
47.步骤(三)、清除每个码本上多余的码元;
48.步骤(四)、利用训练好的码本对新输入的图像做背景差分,输出差分后的二值图像,处理帧数加一;
49.步骤(五)、若还有待处理的视频帧,处理帧数为达到阈值则转步骤(四),处理帧数达到阈值则转步骤(二),若没有待处理的视频帧则结束。
50.具体实施方式四:结合图3说明本实施方式,本实施方式所述一种高空抛物溯源检测方法的步骤三中当夜晚光照条件较差或雨雪天气时使用vibe前景分割技术,vibe前景分割技术的步骤如下:
51.步骤(一)、输入第一张图像初始化背景,为每一个像素点建立数组用来存储背景点像素值。背景初始化时用随机的策略从以当前像素点为中心的九宫格内选择像素值作为该像素点的初始背景值;
52.步骤(二)、前景分割与背景更新,输入一张图像,将其与背景像素值数组做匹配,匹配成功为背景点,然后该点有一定的概率更新该点的背景像素值,也有相同的概率随机更新该点一个邻域点的背景像素值。匹配不成功则为前景点,同时,若一像素点被判断为前
景点超过一定次数则认为是误判将其重新判定为背景点;
53.步骤(三)、输出结果图像;
54.步骤(四)、若还有待处理的视频帧则转步骤(二),否则结束。
55.本实施方式中有三个参数需要手动设置:一是背景点数组的大小,二是认为匹配成功时的最小匹配个数,三是随机更新的概率,vibe算法对参数的敏感度比较低,在本系统中采用了20,2,1/16作为三个参数值。
56.具体实施方式五:结合图1说明本实施方式,本实施方式所述一种高空抛物溯源检测方法的对视频帧的处理中,首先对视频帧进行全局的高斯滤波处理,然后使用中值滤波去除噪点,然后使用膨胀操作使得图像更为连贯,最后使用均值滤波清除未连通区域。
57.具体实施方式六:结合图1说明本实施方式,本实施方式所述一种高空抛物溯源检测方法的步骤三中轮廓检测的具体步骤如下:
58.步骤a、光栅扫描,从二值图像左上角像素点开始从左至右从上至下进行扫描直到当扫到外边界开始点;外边界开始点可以理解为抛物目标的外围轮廓上的点;对应二值图像上像素值为0的像素点到像素值为1的像素点中间的边界点;同时为每一个新发现的外边界起始点赋一个标记值;
59.步骤b、利用边界追踪算法得到该边界上所有像素点信息,把该轮廓并入到轮廓层级结构中;该算法维持的轮廓层级结构包括了从最大的轮廓到最内层轮廓的所有轮廓以及他们之间的内外关系;
60.步骤c、光栅扫描直到扫描到右下角像素点结束流程;此时所有轮廓信息都可以在轮廓层级结构中提取出来。
61.以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质,在本发明的精神和原则之内,对以上实施例所作的任何简单的修改、等同替换与改进等,均仍属于本发明技术方案的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1