一种机载脉冲多普勒雷达系统信号级仿真方法
1.本发明涉及雷达系统仿真技术领域,特别是涉及一种机载脉冲多普勒雷达系统信号级仿真方法。
背景技术:
2.机载脉冲多普勒雷达是战斗机装备的用于实现对各类目标探测、跟踪、成像等多种功能的重要装备,为战斗机飞行员实施武器控制、态势感知提供重要保障。现代机载脉冲多普勒雷达,通过有源相控阵天线、高性能数字信号处理系统等能够实现包括空-空、空-面、导航、成像等多种任务功能,采用脉冲多普勒技术能够有效解决各类杂波对雷达探测产生的影响,并通过波形变化解决测量速度、测量距离模糊的问题。开展雷达设计或验证雷达探测性能时,需要进行计算机仿真验证,搭建信号级仿真模型并利用实际雷达工作参数进行验证,传统的验证手段中,数字化验证仅仅作为原理设计的一部分,无法全面考虑对抗场景需求,很难完整的模拟机载脉冲多普勒雷达的实际信号工作流程,设计与验证流程复杂专业,可视化、模块化难。近年来,随着信号级仿真手段及计算机性能不断提升,以matlab simulink、systemvue等仿真软件为代表的电子系统级仿真工具日渐成熟,为机载脉冲多普勒火控雷达全流程设计与验证提供了强大的运用手段。
技术实现要素:
3.针对现有的机载脉冲多普勒雷达仿真方法存在的问题,本发明设计了一种机载脉冲多普勒雷达系统信号级仿真方法,该方法包括以下步骤:
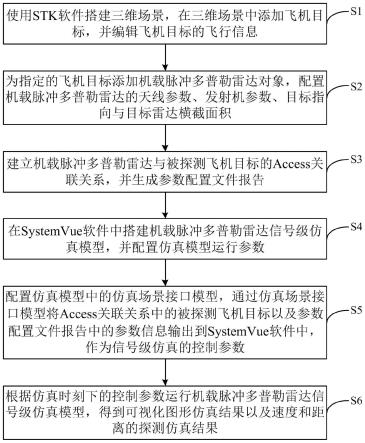
4.s1、使用stk软件搭建三维场景,在三维场景中添加飞机目标,并编辑飞机目标的飞行信息;
5.s2、为指定的飞机目标添加机载脉冲多普勒雷达对象,配置机载脉冲多普勒雷达的天线参数、发射机参数、目标指向与目标雷达横截面积;
6.s3、建立机载脉冲多普勒雷达与被探测飞机目标的access关联关系,并生成参数配置文件报告;
7.s4、在systemvue软件中搭建机载脉冲多普勒雷达信号级仿真模型,并配置仿真模型运行参数;
8.s5、配置仿真模型中的仿真场景接口模型,通过所述仿真场景接口模型将所述access关联关系中的被探测飞机目标以及参数配置文件报告中的参数信息输出到systemvue软件中,作为信号级仿真的控制参数;
9.s6、指定三维场景的某一时刻作为信号级仿真时刻并根据该仿真时刻下的控制参数运行机载脉冲多普勒雷达信号级仿真模型,得到机载脉冲多普勒雷达信号各级处理过程的可视化图形仿真结果以及机载脉冲多普勒雷达对被探测飞机目标的速度和距离的探测仿真结果。
10.与现有技术相比,本发明具有以下有益效果:
11.本发明所提出的机载脉冲多普勒雷达系统信号级仿真方法,通过stk软件搭建雷达系统三维场景,并在为指定的飞机目标添加机载脉冲多普勒雷达对象并建立雷达与被探测飞机目标之间的access关联关系和生成参数配置文件报告之后,通过systemvue软件搭建机载脉冲多普勒雷达信号级仿真模型,同时通过仿真场景接口模型与stk软件连接,读取access关联关系中的被探测飞机目标以及参数配置文件报告中的参数信息,将机载脉冲多普勒雷达对目标回波信号的接收处理过程进行了仿真实现的同时,对目标回波信号的距离和速度进行了无模糊测量,得到了机载脉冲多普勒雷达对被探测飞机目标的速度和距离的探测仿真结果。本发明能够使得机载脉冲多普勒雷达系统的设计、应用、验证更加贴近实际使用场景,且大大提高机载脉冲多普勒雷达系统仿真的逼真度和实用性,为系统开展实际对抗环境的数字化验证提供了平台,同时简化机载脉冲多普勒雷达系统仿真模型搭建与配置,实现机载脉冲多普勒雷达系统的设计的高效、软件化检验验证。
附图说明
12.图1是本发明一种机载脉冲多普勒雷达系统信号级仿真方法的流程图;
13.图2是基于stk软件的三维场景的侧视图;
14.图3是基于stk软件的三维场景的俯视图;
15.图4是本发明中机载脉冲多普勒雷达信号级仿真模型的示意图;
16.图5是雷达发射机输出信号波形仿真结果;
17.图6是雷达发射机输出信号频谱仿真结果;
18.图7是雷达接收机输出仿真结果;
19.图8是脉冲压缩模块输出仿真结果;
20.图9是雷达脉冲多普勒处理模块输出仿真结果;
21.图10是雷达恒虚警检测模块输出仿真结果;
22.图11是“距离-多普勒-幅度”三维展示结果。
具体实施方式
23.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地描述。
24.如图1所示,本发明提供的一种基于stk三维场景的机载脉冲多普勒雷达系统信号级仿真方法,该方法具体步骤如下:
25.s1、使用stk(satellite tool kit,即卫星工具包)软件搭建三维场景,在三维场景中添加飞机目标,并编辑三维场景中飞机目标的飞行信息。
26.在stk软件中,可以添加飞机等具体的目标平台,本方法以典型的双机空战对抗作为应用场景,场景中包含两架飞机目标(j-1、j-2),其中j-1为装备机载脉冲多普勒雷达的载机平台,j-2为来打探测的目标,在stk软件的三维场景中可以编辑每架飞机的飞行信息,飞行信息包括航线起始点和终止点的经纬度、飞行高度、飞行速度、飞行加速度、飞行时间以及转弯半径等,构成两架飞机为迎头接近飞行的对抗场景,其三维空间场景设计如图2、图3所示。
27.在stk软件中,可以通过地图点选的方式,输入j-1、j-2两架飞机目标的航迹信息,
包括了航线起始点和终止点的经纬度,以及该段航迹的速度、加速度、转弯半径、飞行高度等信息,飞机目标j-1、j-2的飞行信息设置如表1、表2所示。
28.表1飞机目标j-1的飞行信息设置
[0029][0030]
表2飞机目标j-2的飞行信息设置
[0031][0032]
s2、为三维场景中指定的飞机目标添加机载脉冲多普勒雷达对象,并配置机载脉冲多普勒雷达的天线参数、发射机参数、目标指向与目标雷达横截面积(radar cross section,rcs)。
[0033]
在飞机目标j-1的antenna界面下加入机载脉冲多普勒雷达对象“airborneradar”,配置雷达天线参数,这里天线类型设置为相控阵(phased array),天线形状设置为多边形(polygon),通过设置x、y方向的天线单元数和单元距离,最终系统自动计算出天线孔径尺寸和辐射单元数。
[0034]
在beam direction provider界面中,可以设置波束指向探测目标飞机j-2。
[0035]
通过编辑j-2的属性中,雷达横截面积radar cross section选项,可以根据实际频率或目标起伏特性配置飞机目标的rcs,此处将j-2的雷达横截面积的类型设置为常数(constant value),其大小为13.0103dbsm。
[0036]
s3、在stk的三维场景中,为指定的飞机目标建立access关联关系,即建立机载脉冲多普勒雷达与被探测飞机目标的access关联关系,并生成信号级仿真需要的参数配置文件报告。
[0037]
将此时机载脉冲多普勒雷达与飞机目标j-2之间建立连接关系access,并按照“stk_radar_rep.rst”格式生成对应的参数配置文件报告(report),参数配置文件报告中包括了systemvue软件仿真需要的距离延迟、传播衰减、天线增益等信息,在实际仿真时,systemvue软件会通过接口模块控制stk按照设置的仿真节拍生成report并将相关参量输入进systemvue以实现该时刻的信号级仿真。
[0038]
s4、在systemvue软件中搭建机载脉冲多普勒雷达信号级仿真模型,并配置仿真模
型运行参数。
[0039]
keysight公司的systemvue软件拥有雷达、通信、导航等多种专业化、模块化的开发工具库,并且能够允许用户使用包括c++、matlab、python在内的主流编程语言进行二次开发,其图形化分析显示功能强大,得到了很多雷达研发厂商和应用人员的青睐。尤其是systemvue提供了与场景仿真软件stk的接口,使得二者可以有机结合,本发明通过将stk和systemvue相结合,实现将逼真的场景运动环境与信号级仿真模型进行联合仿真。
[0040]
在systemvue软件中,按照机载脉冲多普勒雷达工作原理和信号流程,设计机载脉冲多普勒雷达的信号级仿真模型,如图4所示,该仿真模型主要包括雷达发射机、仿真场景接口模型、雷达接收机、雷达信号处理机、雷达数据处理机五部分,为了实现中重频(middle pulse repeat frequency,mprf)的脉冲多普勒处理,搭建2套并行的雷达发射机、仿真场景接口模型、雷达接收机、雷达信号处理机,其除脉冲重复间隔(pulse repeat interval,pri)、脉冲宽度参数设置不同外,其他参数完全相同,通过2种pri组合信号,可实现机载脉冲多普勒速度和距离解模糊。下面详细介绍该仿真模型的主要组成及原理。
[0041]
雷达发射机(radar_txsystem)。雷达发射机包括信号激励模块、上变频模块和功率放大器,模拟了信号激励模块输出的雷达激励信号经上变频模块变频后,再通过功率放大器进行功放得到雷达发射信号的过程。
[0042]
仿真场景接口模型(stk_targets)。仿真场景接口模型包括仿真场景接口模块(stk_interface)、发射天线射频通道模块(rf_txant_channel)和接收天线射频通道模块(rf_rxant_channel),仿真场景接口模型通过仿真场景接口模块与stk连接,仿真场景接口模块控制stk按照设置的时间,依据指定的access关联关系和生成的report,读取report中的参数传递到systemvue中作为场景仿真输入,读取的参数包括发射天线增益、发射波程衰减、发射波程延迟时间、目标雷达横截面积、接收天线增益、接收波程衰减和接收波程延迟时间,以上参数通过控制收发天线及传输模拟模型、rcs模拟模型,形成符合当前时刻stk仿真场景中目标关系的雷达回波信号并输出。
[0043]
具体地,仿真场景接口模块通过读取参数配置文件报告得到发射天线增益、发射波程衰减、发射波程延迟时间、目标雷达横截面积、接收天线增益、接收波程衰减和接收波程延迟时间,并将仿真时刻以上参数值作为输出值对应输出到发射天线射频通道模块和接收天线射频通道模块。
[0044]
仿真场景接口模块将仿真时刻下的发射参数(发射天线增益、发射波程衰减、发射波程延迟时间)输入到发射天线射频通道模块,发射天线射频通道模块通过对输入的雷达发射信号加入发射天线增益、发射波程衰减并根据发射波程延迟时间进行延时后得到发射雷达信号到达被探测飞机目标处的单程雷达信号,然后在单程雷达信号上加入目标雷达横截面积后输入到接收天线射频通道模块;接收天线射频通道模块对输入的信号加入接收天线增益、接收波程衰减并根据接收波程延迟时间进行延时后,得到最后的目标回波信号,其中目标雷达横截面积的值通过控制信号的增益大小实现。
[0045]
雷达接收机(radar_rxsystem)。雷达接收机仿真了经雷达天线接收到的目标回波信号,雷达接收机包括收发转换开关模块(radar_switch)、增益控制模块(radar_gainctrl)、接收机噪声模拟模块(noise density)和下变频模块(radar_rx)。收发转换开关模块对目标回波信号进行收发隔离,增益控制模块进行自动增益控制,接收机噪声模拟
模块模拟接收机中的热噪声,然后将接收机噪声模拟模块输出的信号通过下变频模块进行数字下变频处理,最终输出处理后的雷达中频信号。
[0046]
雷达信号处理机(radar_signalprocess)。雷达信号处理机包括脉冲压缩模块(radar_pc)、雷达脉冲多普勒处理模块(radar_pd)和雷达恒虚警检测模块(radar_cfar),首先脉冲压缩模块将雷达接收机处理后的雷达中频信号与雷达发射机送入的参考脉冲进行脉冲压缩处理,再通过雷达脉冲多普勒处理模块进行动目标显示处理(mti)和动目标检测(mtd)处理,然后在雷达恒虚警检测模块中完成恒虚警检测,最终输出检测结果。
[0047]
雷达数据处理机(radar_dataprocess)。雷达数据处理机包括雷达检测结果定心模块(radar_plotscentroid)和雷达解模糊模块(radar_ambgtresolution),雷达检测结果定心模块接收两路不同pri信号经过雷达信号处理机后输出的检测结果,分别对两路信号检测结果进行距离与多普勒定心处理,消除夸距离/跨多普勒单元引起的影响,再将定心后的检测结果送入雷达解模糊模块,雷达解模糊模块通过多pri信号联合解距离和速度模糊,最终输出无模糊的速度和距离的探测仿真结果。
[0048]
搭建好完整的机载脉冲多普勒雷达信号级仿真模型后,可以配置雷达参数。为了便于统一,可以在搭建模型时对每个模型的参数进行变量化替代,最终在parameter中统一编辑。为了应用仿真,典型仿真参数设置如表3所示。
[0049]
表3典型仿真参数
[0050]
参数(变量)名称含义默认值单位数据类型pri上支路脉冲重复间隔45
×
10-6
秒浮点数pri_1下支路脉冲重复间隔37
×
10-6
秒浮点数pulsewidth上支路脉冲宽度1.9
×
10-6
秒浮点数pulsewidth2下支路脉冲宽度1.7
×
10-6
秒浮点数bandwidth雷达信号带宽4
×
106赫兹浮点数rf_freq雷达信号射频频率10
×
109赫兹浮点数if_freq雷达信号中频频率70
×
106赫兹浮点数bb_samplingrate仿真基带信号采样频率107赫兹浮点数bb_upsamplingratio仿真变频采样频率20—整数numofpulse雷达积累脉冲数512—整数mti_type信号处理做mti的类型0:不做mti—枚举型
[0051]
s5、配置仿真模型中的仿真场景接口模型,通过仿真场景接口模型将三维场景中指定的access关联关系中的被探测飞机目标以及参数配置文件报告中的参数信息输出到systemvue软件中,作为信号级仿真的控制参数。
[0052]
在步骤s4中的仿真场景接口模型的子模块中,双击仿真场景接口模块,打开模块属性界面,首先在“report style”处选择stk参数配置文件路径,“primary(from)object”和“access(to)object”分别选择雷达对象和目标对象,“animation time”标签中的“start”和“stop”可以设置stk三维场景中对应的仿真起始时间和仿真结束时间,“time step”为时间间隔。
[0053]
s6、按照三维场景需求,指定三维场景的某一时刻作为信号级仿真时刻并根据该仿真时刻下的控制参数运行机载脉冲多普勒雷达信号级仿真模型,得到机载脉冲多普勒雷
达信号各级处理过程的可视化图形仿真结果,以及得到机载脉冲多普勒雷达对被探测飞机目标的速度和距离的探测仿真结果。
[0054]
在本步骤中,运行机载脉冲多普勒雷达信号级仿真模型,可以直接得到机载脉冲多普勒雷达对被探测飞机目标的速度和距离的探测仿真结果,如表4所示。
[0055]
表4机载脉冲多普勒雷达信号级仿真模型探测仿真结果
[0056]
indexs26_indexs26109771021599.609329769543599.609549768065599.609769766587599.6099897650109599.609
[0057]
在表4中,通过列表输出了5次探测的10个结果,其中奇数索引index是探测目标相对距离,偶数索引index是两个目标的相对速度。在当前仿真时刻(14may 201816:01:01.000)通过查询stk中的真实距离为97.235km,真实相对速度为600m/s(j-1、j-2相向迎头飞行,速度分别为300m/s),仿真探测距离值为97.710km、速度为599.609m/s,仿真值与真实值基本一致,体现了雷达对目标的探测结果的正确性,表明仿真模型是可靠的。
[0058]
除了直接得到探测仿真结果,机载脉冲多普勒雷达信号级仿真模型还利用sink模块记录观察各个信号环节的信号波形和频谱仿真情况,实现对雷达发射机输出的信号波形和频谱、雷达接收机接收的目标回波信号、脉冲压缩模块输出结果、雷达脉冲多普勒处理模块输出结果、雷达恒虚警检测模块输出结果以可视化图形进行,还用于对仿真数据加工后,进行“距离-多普勒-幅度”三维展示。
[0059]
机载脉冲多普勒雷达信号级仿真模型模拟了机载脉冲多普勒雷达发射信号特征波形特征,图5、图6所示分别为雷达发射机输出信号波形(包络特征)仿真结果和频谱仿真结果,从图6可以发现,雷达发射机的发射信号功率72.35dbm与实际机载脉冲多普勒雷达发射功率基本一致。
[0060]
如图7所示,雷达信号经过双程的空间传播衰减,进入雷达接收机后,能量十分微弱,已经淹没在接收机噪声中。
[0061]
如图8、图9、图10所示,雷达信号处理机对接收到目标回波噪声进行脉冲压缩和脉冲多普勒(相参积累)处理后、恒虚警检测后,可以发现经过相参积累后目标能够被检测到,图10中峰值所在位置为被探测飞机目标位置。
[0062]
利用仿真数据加工后,可以进行“距离-多普勒-幅度”三维展示,如图11所示,该显示方法可以明显看到被探测飞机目标所处的距离和多普勒单元,通过这种视角,也为开展抗杂波、抗干扰处理提供了仿真验证手段。
[0063]
综上所述,本发明提供了一种基于stk三维场景的雷达系统信号级仿真方法,该方
法通过stk软件建立雷达系统三维场景,然后通过systemvue软件搭建雷达系统信号级仿真模型,同时与stk连接读取场景目标配置参数文件,将雷达系统对目标回波信号的接收处理过程进行了仿真实现,最后对目标回波信号的距离和速度进行了无模糊测量。
[0064]
本发明所提出的机载脉冲多普勒雷达系统信号级仿真方法,通过stk软件搭建雷达系统三维场景,并在为指定的飞机目标添加机载脉冲多普勒雷达对象并建立雷达与被探测飞机目标之间的access关联关系和生成参数配置文件报告之后,通过systemvue软件搭建机载脉冲多普勒雷达信号级仿真模型,同时通过仿真场景接口模型与stk软件连接,读取access关联关系中的被探测飞机目标以及参数配置文件报告中的参数信息,将机载脉冲多普勒雷达对目标回波信号的接收处理过程进行了仿真实现的同时,对目标回波信号的距离和速度进行了无模糊测量,得到了机载脉冲多普勒雷达对被探测飞机目标的速度和距离的探测仿真结果。本发明能够使得机载脉冲多普勒雷达系统的设计、应用、验证更加贴近实际使用场景,且大大提高机载脉冲多普勒雷达系统仿真的逼真度和实用性,为系统开展实际对抗环境的数字化验证提供了平台,同时简化机载脉冲多普勒雷达系统仿真模型搭建与配置,实现机载脉冲多普勒雷达系统的设计的高效、软件化检验验证。
[0065]
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0066]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1