一种路侧检测方法、设备、系统及介质与流程
本发明涉及物联网,尤其涉及一种路侧检测方法、设备、系统及介质。
背景技术:
1、目前,自动驾驶及辅助驾驶技术快速发展,而车路协同技术则赋予了自动驾驶及辅助驾驶更大的可能和更快的落地,所谓车路协同是指“聪明的车”(智能车辆)与“智慧的路”(智能道路)协同合作,用以解决单独的车辆智能的局限性问题,提升车辆自动驾驶的安全性,提供更高的安全冗余。
2、建设“智慧的路”通常需要在路侧架设支撑杆,在杆上安装摄像头、激光雷达、毫米波雷达、计算单元等多种传感器共同对路上的目标对象,尤其是移动目标对象(行人、车辆、骑车人等)进行感知,然后,结合路侧rsu(road side unit)装置,可以发送广播信息给周围的车辆,以给路上行驶的车辆提供车辆视野盲区及超出车辆观测距离的道路和目标信息。
3、也即是说,现有的车路协同的路侧感知系统,在检测感知过程中,通常需要利用安装在路测的多种传感器同步工作以实现检测和定位,这导致该检测感知过程面临巨大的时间同步、数据传输以及算法处理难度。
技术实现思路
1、本发明实施例提供一种路侧检测方法、设备、系统及介质,以解决现有路侧检测的时间同步、数据传输以及算法处理难度大的问题。
2、为解决上述技术问题,本发明是这样实现的:
3、第一方面,本发明实施例提供一种路侧检测方法,所述方法包括:
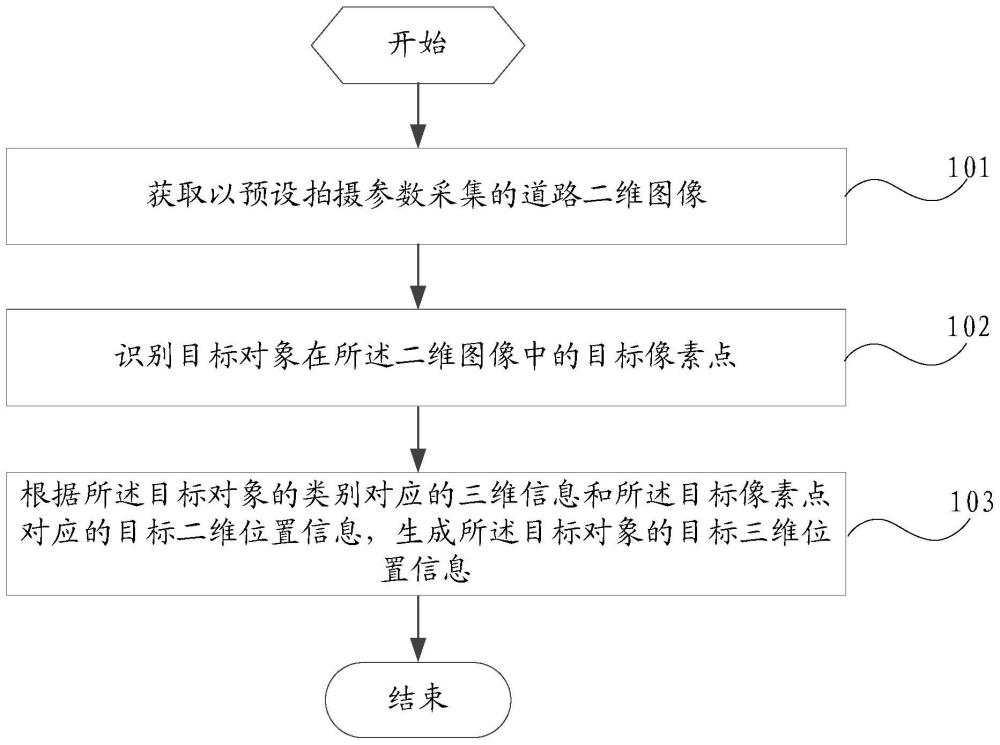
4、获取以预设拍摄参数采集的道路二维图像,所述二维图像中的像素点对应基于所述预设拍摄参数预先标定的二维位置信息;
5、识别目标对象在所述二维图像中的目标像素点;
6、根据所述目标对象的类别对应的三维信息和所述目标像素点对应的目标二维位置信息,生成所述目标对象的目标三维位置信息。
7、可选的,所述根据所述目标对象的类别对应的三维信息和所述目标像素点对应的目标二维位置信息,生成所述目标对象的目标三维位置信息,包括:
8、确定所述目标对象的类别对应的三维尺寸信息和所述目标二维位置信息中所述目标对象的中心位置对应的中心二维位置信息;
9、根据所述中心二维位置信息和所述三维尺寸信息,生成所述目标对象的目标三维位置信息。
10、可选的,所述方法还包括:
11、将所述目标对象的目标三维位置信息发送至云端服务器和路侧单元rsu设备中的至少一个。
12、可选的,所述二维位置信息通过如下方式标定,包括:
13、获取激光雷达采集的标定点云数据以及成像模块基于所述预设拍摄参数采集的标定二维图像,所述标定点云数据包括标准标定板的点云数据,所述标定二维图像包括所述标准标定板的二维数据;
14、通过对齐所述标准标定板的点云数据和二维数据,确定所述标定二维图像像素点和所述标定点云数据的点的位置信息之间的位置映射关系;
15、基于所述标定点云数据和所述位置映射关系,确定所述标定二维图像中的像素点的二维位置信息;
16、以所述标定二维图像中的像素点的二维位置信息作为所述以预设拍摄参数采集的道路二维图像的像素点对应的二维位置信息;
17、所述激光雷达在标定过程中通过固定模具与所述成像模块固定连接。
18、可选的,所述标定点云数据,包括:
19、所述激光雷达采集的初始点云数据中距离地平面预设高度范围内的点云数据,所述地平面根据所述初始点云数据中的n个点的位置确定。
20、第二方面,本发明实施例提供一种路侧检测设备,包括:
21、获取模块,用于获取以预设拍摄参数采集的道路二维图像,所述二维图像中的像素点对应基于所述预设拍摄参数预先标定的二维位置信息;
22、识别模块,用于识别目标对象在所述二维图像中的目标像素点;
23、定位模块,用于根据所述目标对象的类别对应的三维信息和所述目标像素点对应的目标二维位置信息,生成所述目标对象的目标三维位置信息。
24、可选的,所述定位模块,包括:
25、确定模块,用于确定所述目标对象的类别对应的三维尺寸信息和所述目标二维位置信息中所述目标对象的中心位置对应的中心二维位置信息;
26、定位子模块,用于根据所述中心二维位置信息和所述三维尺寸信息,生成所述目标对象的目标三维位置信息。
27、可选的,所述设备还包括:
28、发送模块,用于将所述目标对象的目标三维位置信息发送至云端服务器和路侧单元rsu设备中的至少一个。
29、可选的,所述二维位置信息通过如下方式标定,包括:
30、获取激光雷达采集的标定点云数据以及成像模块基于所述预设拍摄参数采集的标定二维图像,所述标定点云数据包括标准标定板的点云数据,所述标定二维图像包括所述标准标定板的二维数据;
31、通过对齐所述标准标定板的点云数据和二维数据,确定所述标定二维图像像素点和所述标定点云数据的点的位置信息之间的位置映射关系;
32、基于所述标定点云数据和所述位置映射关系,确定所述标定二维图像中的像素点的二维位置信息;
33、以所述标定二维图像中的像素点的二维位置信息作为所述以预设拍摄参数采集的道路二维图像的像素点对应的二维位置信息;
34、所述激光雷达在标定过程中通过固定模具与所述成像模块固定连接。
35、可选的,所述标定点云数据,包括:
36、所述激光雷达采集的初始点云数据中距离地平面预设高度范围内的点云数据,所述地平面根据所述初始点云数据中的n个点的位置确定。
37、第三方面,本发明实施例提供一种电子设备,包括:
38、所述处理器,用于获取以预设拍摄参数采集的道路二维图像,所述二维图像中的像素点对应基于所述预设拍摄参数预先标定的二维位置信息;
39、识别目标对象在所述二维图像中的目标像素点;
40、根据所述目标对象的类别对应的三维信息和所述目标像素点对应的目标二维位置信息,生成所述目标对象的目标三维位置信息。
41、可选的,所述根据所述目标对象的类别对应的三维信息和所述目标像素点对应的目标二维位置信息,生成所述目标对象的目标三维位置信息,包括:
42、确定所述目标对象的类别对应的三维尺寸信息和所述目标二维位置信息中所述目标对象的中心位置对应的中心二维位置信息;
43、根据所述中心二维位置信息和所述三维尺寸信息,生成所述目标对象的目标三维位置信息。
44、可选的,所述电子设备还包括:
45、收发机,用于将所述目标对象的目标三维位置信息发送至云端服务器和路侧单元rsu设备中的至少一个。
46、可选的,所述二维位置信息通过如下方式标定,包括:
47、获取激光雷达采集的标定点云数据以及成像模块基于所述预设拍摄参数采集的标定二维图像,所述标定点云数据包括标准标定板的点云数据,所述标定二维图像包括所述标准标定板的二维数据;
48、通过对齐所述标准标定板的点云数据和二维数据,确定所述标定二维图像像素点和所述标定点云数据的点的位置信息之间的位置映射关系;
49、基于所述标定点云数据和所述位置映射关系,确定所述标定二维图像中的像素点的二维位置信息;
50、以所述标定二维图像中的像素点的二维位置信息作为所述以预设拍摄参数采集的道路二维图像的像素点对应的二维位置信息;
51、所述激光雷达在标定过程中通过固定模具与所述成像模块固定连接。
52、可选的,所述标定点云数据,包括:
53、所述激光雷达采集的初始点云数据中距离地平面预设高度范围内的点云数据,所述地平面根据所述初始点云数据中的n个点的位置确定。
54、第四方面,本发明实施例提供一种路侧检测系统,包括:
55、成像模块,用于以预设拍摄参数采集道路的二维图像;
56、路侧检测模块,用于获取所述二维图像,所述二维图像中的像素点对应基于所述预设拍摄参数预先标定的二维位置信息;
57、识别目标对象在所述二维图像中的目标像素点;
58、根据所述目标对象的类别对应的三维信息和所述目标像素点对应的目标二维位置信息,生成所述目标对象的目标三维位置信息。
59、可选的,所述根据所述目标对象的类别对应的三维信息和所述目标像素点对应的目标二维位置信息,生成所述目标对象的目标三维位置信息,包括:
60、确定所述目标对象的类别对应的三维尺寸信息和所述目标二维位置信息中所述目标对象的中心位置对应的中心二维位置信息;
61、根据所述中心二维位置信息和所述三维尺寸信息,生成所述目标对象的目标三维位置信息。
62、可选的,所述路侧检测系统还包括:
63、通信模块,用于将所述目标对象的目标三维位置信息发送至云端服务器和路侧单元rsu设备中的至少一个。
64、可选的,所述二维位置信息通过如下方式标定,包括:
65、获取激光雷达采集的标定点云数据以及所述成像模块基于所述预设拍摄参数采集的标定二维图像,所述标定点云数据包括标准标定板的点云数据,所述标定二维图像包括所述标准标定板的二维数据;
66、通过对齐所述标准标定板的点云数据和二维数据,确定所述标定二维图像像素点和所述标定点云数据的点的位置信息之间的位置映射关系;
67、基于所述标定点云数据和所述位置映射关系,确定所述标定二维图像中的像素点的二维位置信息;
68、以所述标定二维图像中的像素点的二维位置信息作为所述以预设拍摄参数采集的道路二维图像的像素点对应的二维位置信息;
69、所述激光雷达在标定过程中通过固定模具与所述成像模块固定连接。
70、可选的,所述标定点云数据,包括:
71、所述激光雷达采集的初始点云数据中距离地平面预设高度范围内的点云数据,所述地平面根据所述初始点云数据中的n个点的位置确定。
72、第五方面,本发明实施例提供一种电子设备,包括:处理器、存储器及存储在所述存储器上并可在所述处理器上运行的程序,所述程序被所述处理器执行时实现如上述第一方面所述的路侧检测方法的步骤。
73、第六方面,本发明实施例提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上述第一方面所述的路侧检测方法的步骤。
74、本发明实施例中,获取以预设拍摄参数采集的道路二维图像,所述二维图像中的像素点对应基于所述预设拍摄参数预先标定的二维位置信息;识别目标对象在所述二维图像中的目标像素点;根据所述目标对象的类别对应的三维信息和所述目标像素点对应的目标二维位置信息,生成所述目标对象的目标三维位置信息。本发明实施例中,预先标定二维图像,在实际路测检测过程中,不必须依靠激光雷达、毫米波雷达或微波雷达等多种传感器同步联合作业,通过二维图像采集即可实现路侧检测,降低了路侧检测过程中的数据处理、时间同步以及数据传输难度。
- 还没有人留言评论。精彩留言会获得点赞!