一种基于机器视觉自学习的设备维修方法及装置与流程
1.本文件涉及设备检测和维护技术领域,尤其涉及一种基于机器视觉自学习的设备维修方法及装置。
背景技术:
2.目前处理在设备生产过程中出现质量缺陷时,维修人员首先凭经验根据缺陷特征进行相应部位调整或维修;若故障没有排除,则会根据设备装配图册根据结构原理进行深层次原因分析;当经验和结构原理分析均不能修复故障的情况下,则需要对生产过程进行蹲守观察寻找规律,进行试验性的维修。这种情况下对首次出现的缺陷或顽固性缺陷排除通常会耗费大量时间,造成大量产品浪费。因此,需要提供一种能够自动监测异常情况,对异常情况进行分析后进行维修,并能够对维修效果进行检验的方法及装置。
技术实现要素:
3.本说明书一个或多个实施例提供了一种基于机器视觉自学习的设备维修方法,包括:
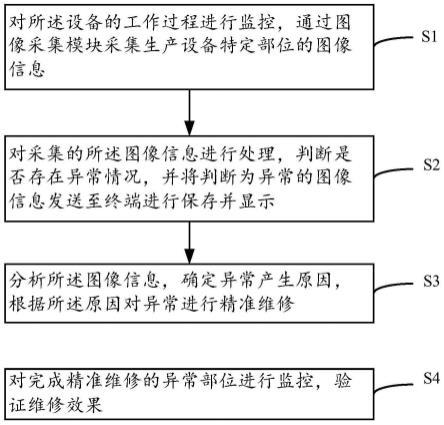
4.s1.对所述设备的工作过程进行监控,通过图像采集模块采集生产设备特定部位的图像信息;
5.s2.对采集的所述图像信息进行处理,判断是否存在异常情况,并将判断为异常的图像信息发送至终端进行保存并显示;
6.s3.分析所述图像信息,确定异常产生原因,根据所述原因对异常进行精准维修;
7.s4.对完成精准维修的异常部位进行监控,验证维修效果。
8.本说明书一个或多个实施例提供了一种基于机器视觉自学习的设备维修装置,包括:
9.图像采集单元,安装于待检测设备的特定部位,用于对所述设备的工作过程进行监控,采集所述设备特定部位的图像信息;
10.图像处理单元,用于对采集的所述图像信息进行处理,判断是否存在异常情况,并将判断结果及图像信息通过终端显示单元进行展示;
11.终端显示单元,用于对采集的所述图像信息及对应的判断结果进行保存并显示;
12.电源,用于对图像采集单元进行供电。
13.本发明有益效果如下:本发明中的设备维修装置安装灵活简单,能够根据生产设备的缺陷特征安装于设备的不同部位,多方位的对缺陷产生过程进行记录,并通过自学习找出设备异常情况,便于进行更精准的设备维修;能够进行自定义缺陷特征检验,对维修后的效果验证时,可现场定义缺陷特征进行检验。
14.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
附图说明
15.为了更清楚地说明本说明书一个或多个实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本说明书中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
16.图1为本说明书一个或多个实施例提供的一种基于机器视觉自学习的设备维修方法的流程图;
17.图2为本说明书一个或多个实施例提供的一种基于机器视觉自学习的设备维修方法的具体流程图;
18.图3为本说明书一个或多个实施例提供的一种基于机器视觉自学习的设备维修装置的组成示意图;
19.图4为本说明书一个或多个实施例提供的一种基于机器视觉自学习的设备维修装置进行检验时的结构示意图;
20.图5为本说明书一个或多个实施例提供的一种基于机器视觉自学习的设备维修装置进行验证时的结构示意图。
21.附图说明:
22.1:生产设备;2:接近开关;3:单片机;4:笔记本;5:24v电源;6:工业相机;7:光源。
具体实施方式
23.为了使本技术领域的人员更好地理解本说明书一个或多个实施例中的技术方案,下面将结合本说明书一个或多个实施例中的附图,对本说明书一个或多个实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本说明书的一部分实施例,而不是全部的实施例。基于本说明书一个或多个实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都应当属于本文件的保护范围。
24.方法实施例
25.根据本发明实施例,提供了一种基于机器视觉自学习的设备维修方法,图1为本说明书一个或多个实施例提供的一种基于机器视觉自学习的设备维修方法的流程图,如图1所示,根据本发明实施例的一种基于机器视觉自学习的设备维修方法具体包括:
26.s1.对所述设备的工作过程进行监控,通过图像采集模块采集生产设备特定部位的图像信息。
27.具体的,当待检测设备到达接近开关的触发范围后触发接近开关,所述接近开关被触发后向单片机发送脉冲信号和电位器信号;
28.单片机接收接近开关的脉冲信号和电位器信号,用电位器信号将脉冲信号进行延时后,将触发采集信号输出到图像采集单元,触发图像采集单元拍照,对设备当前部位进行图像采集。
29.其中,图像采集单元可以包括工业相机和/或高速摄像机。
30.s2.对采集的所述图像信息进行处理,判断是否存在异常情况,并将判断为异常的图像信息发送至终端进行保存并显示。
31.具体的,对采集的图像信息进行处理,包括对图像的对比度、形状或颜色进行计算
或识别;其中,图像信息包括照片和视频;
32.根据设备的缺陷特征,预设对比度、形状或颜色的阈值作为判断的异常的条件,对设备可能产生缺陷的部位图像信息进行检验,判断采集的图像信息是否符合预设的对比度、形状或颜色的阈值,若符合,则继续检验下一个图像,若不符合,则触发异常报警,判断此图像信息存在异常情况;
33.将检验之后判断为存在异常情况的图像信息发送至终端显示单元保存并进行显示。
34.如果检验中未发现异常图像,则将所述图像采集模块移动至下一个可能部位监控,进行图像采集及处理,直至找到异常。
35.s3.分析所述图像信息,确定异常产生原因,根据所述原因对异常进行精准维修;
36.具体的,找到存在异常的图像触发异常报警后,存在异常的图像信息通过终端显示单元进行展示,通过人工分析图像来分析原因,然后在确定缺陷产生的原因及部位的情况下进行精准维修。
37.s4.对完成精准维修的异常部位进行监控,验证维修效果。
38.维修完成后通过上述方法对维修部位进行监控,根据是否有报警图像及图像是否误检验证开始的缺陷产品故障是否已经得到彻底解决。
39.图2为本说明书一个或多个实施例提供的一种基于机器视觉自学习的设备维修方法的具体流程图,如图2所示,
40.当设备生产过程中发现质量缺陷,维修人员首先凭借经验维修,修理后经人工检验确认维修效果;如果未修复则会通过查询相关资料进行深度分析研究,再进行维修;如果仍然未修复,使用本发明装置,通过机器视觉接入设备脉冲信号,并以此作为工业相机的拍照触发信号,针对可能造成上述缺陷的设备特定部位进行监控,同时通过机器自学习寻找异常情况,如果未发现异常,对下一个可能部位进行监控直至找到异常,并根据照片分析缺陷产品产生原因实施精准维修。设备维修后,针对上述质量缺陷特征使用本发明进行特定产品位置监控,用来验证维修效果。
41.其中,自定义缺陷特征具体为:根据产品缺陷特征,将工业相机移动到能够识别该特征的位置,根据缺陷特征,设定对比度或形状或颜色等作为视觉检验的条件,对产品进行检验。
42.在线特定缺陷验证具体为:如果有检验图像超出设定的阈值,则进行报警并保存图像,根据是否有报警图像及图像是否误检,就可以验证开始的缺陷产品故障是否已经得到彻底解决。
43.装置实施例
44.根据本发明实施例,提供了一种基于机器视觉自学习的设备维修装置,图3为本说明书一个或多个实施例提供的一种基于机器视觉自学习的设备维修装置的组成示意图,图4为本说明书一个或多个实施例提供的一种基于机器视觉自学习的设备维修装置进行检验时的结构示意图,如图3和图4所示,根据本发明实施例的一种基于机器视觉自学习的设备维修装置具体包括:
45.图像采集单元301,安装于待检测设备的特定部位,用于对所述设备的工作过程进行监控,采集所述设备特定部位的图像信息;其中,图像采集单元301包括工业相机6或高速
摄像机(图中未画出)。
46.图像处理单元302,用于对采集的所述图像信息进行处理,判断是否存在异常情况,并将判断结果及图像信息通过终端显示单元进行展示;其中,所述异常情况包括所述图像信息中的形状异常、颜色异常和对比度异常。
47.终端显示单元303,用于对采集的所述图像信息及对应的判断结果进行保存并显示;终端显示单元303可以为电脑、手机和平板等。
48.电源304,采用24v电源5用于对图像采集单元进行供电。
49.进一步地,本装置还包括照明单元305,照明单元305包括光源7,光源7与所述图像采集单元301相邻安装,并与所述图像采集装置301连接,用于在进行图像采集时提供光源7。
50.进一步地,本装置还包括控制单元306,控制单元306包括接近开关2和单片机3,所述接近开关2通过单片机3与所述图像采集单元301连接,所述单片机用于接收接近开关的脉冲信号,并发送触发采集信号至所述图像采集单元,作为图像采集触发信号。
51.本发明实施例是与上述方法实施例对应的装置实施例,各个单元的具体操作可以参照方法实施例的描述进行理解,在此不再赘述。
52.在一个实施例中,在对生产设备进行实际缺陷检验时,设备维修装置的安装结构如图4所示,当出现产品缺陷需要使用本发明装置及方法时,将接近开关2固定在生产设备1旁边,用于检测缺陷产品,当缺陷产品靠近时触发接近开关2,由此产生的脉冲信号必然与缺陷产品同步,该脉冲信号输入到单片机3,电位器作为模拟量输入单片机3,经过模电转换后用于调节延时时间,脉冲信号经过延时后再输出到工业相机6,触发图像采集,由图像处理单元——本实施例中为笔记本电脑4,判断采集的图像是否存在异常情况,若存在,则将异常图像保存到笔记本电脑4上,并展示在笔记本电脑4的显示屏上,根据异常图像分析缺陷产品产生原因实施精准维修。由此,可以实现某一产品到下一产品整个生产过程的监控。
53.设备维修后,需要对产品质量进行检验确认,检查维修效果,图5为本说明书一个或多个实施例提供的一种基于机器视觉自学习的设备维修装置进行验证时的结构示意图,使用本装置继续进行特定产品位置监控,用来验证维修效果时如图5所示,将工业相机置于生产设备1产品线末端,连接关系不变,同样用接近开关2作为触发,工业相机检验特定缺陷特征,通过自学习,产品异常时保持图像到笔记本,便于能够离线确认维修是否彻底。
54.本发明有益效果如下:本发明中的设备维修辅助装置安装灵活简单,能够根据生产设备的缺陷特征安装于设备的不同部位,多方位的对缺陷产生过程进行记录,并通过自学习找出设备异常情况,便于进行更精准的设备维修;能够进行自定义缺陷特征检验,对维修后的效果验证时,可现场定义缺陷特征进行检验。
55.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1