一种用于管道应力分析的加速度载荷计算公式修正方法
1.本发明属于船舶结构领域,涉及了一种用于管道应力分析的加速度载荷计算公式修正方法。
背景技术:
2.fpso长期在海上工作,因其面临的海况十分恶劣,所以对fpso上输油管道提出了更高的要求。除了要考虑风载荷、船体运动产生的位移载荷、热胀载荷等,还需要考虑船体自身运动的加速度载荷对管道的影响。但目前在计算作用在管道上的加速度载荷时,普遍采用的是用重心处的加速度代替管道实际位置处的加速度载荷,用这种方法计算出的管道应力结果在大多数情况下较为保守,容易影响管道的安全性。
技术实现要素:
3.针对上述问题,本发明提供了一种用于管道应力分析的加速度载荷预报方法,该方法能够根据船舶的运动方程以及水动力系数求解出船舶的加速度,可用来对管道应力进行分析,更好提升管道的安全性能。
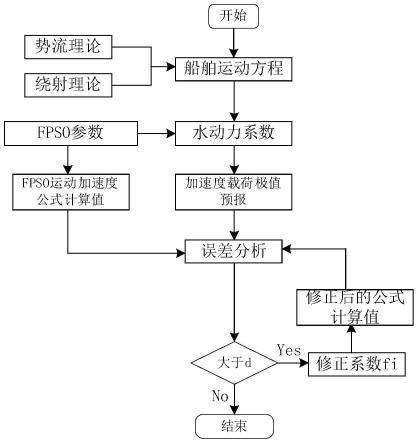
4.本发明的技术方案是:本发明所述的一种用于管道应力分析的加速度载荷计算公式修正方法,其具体操作步骤如下:
5.步骤(1)、基于势流理论及绕射理论,建立船舶运动方程;
6.步骤(2)、根据通用型fpso的船长、型宽、型深、设计吃水、排水量及惯性矩参数,运用ansys aqwa软件计算其水动力系数,并使用sesam软件进行加速度的长期预报;
7.步骤(3)、根据通用型fpso的船长、型宽、型深、设计吃水、实际吃水、排水量,根据船级社规范定义的船舶运动加速度的计算公式计算出其各个自由度的加速度值;
8.步骤(4)、将步骤(2)和(3)中计算得到的加速度值进行对应的误差分析,并将其与最小误差d进行对比;
9.步骤(5)、对于步骤(4)中的误差值大于最低误差的加速度计算值进行修正,并引入修正系数fi;
10.步骤(6)、将修正后的加速度计算值与步骤(2)中的加速度预报值比较,分析误差,对于误差大于最小误差d的加速度值继续执行步骤(5);
11.循环往复,直至误差小于最小误差d为止;
12.步骤(7)、修正后的加速度计算公式可作为加速度载荷计算公式代入到通用型fpso管道应力分析中;计算其管道上应力集中点的实际应力值,为管道设计提供参考。
13.进一步的,在建立船舶运动方程时,需要先定义坐标系来描述船舶运动,所定义的船舶坐标系方法如下:
14.以通用型fpso在满载工况下水线面与尾垂线的交点作为坐标原点,水线面与中线面的交线为x轴,指向船首为正;水线面与中站面的交线为y轴,指向左舷为正;中线面与中站面的交线为z轴,向上为正;
15.在步骤(1)中,所述建立船舶运动方程具体如下:
[0016][0017]
式中:m
jk
表示船舶广义质量矩阵,a
jk
表示附加质量,b
jk
表示阻尼系数,c
jk
表示静水恢复力系数,表示复振幅;
[0018]
其中,ηk表示船舶离开平衡位置的位移,k=1,
…
,6分别表示纵荡、横荡、垂荡,横摇、纵摇及艏摇。
[0019]
进一步的,在步骤(2)中,所述运用ansys aqwa软件进行水动力系数计算具体如下:
[0020]
经过水动力计算后,进行波浪谱分析和长期预报,可得到各个自由度的加速度极限值,即加速度预报值;
[0021]
在加速度预报过程中,做如下假定:
[0022]
31)、浪向角为0
°
~180
°
,采取的计算浪向间隔为15
°
,共13个浪向,并假设每个浪向出现的概率均为1/13;
[0023]
32)、波浪频率为0.2~1.8rad/s,间隔为0.05rad/s;
[0024]
33)、所采用的海况为北大西洋海况;
[0025]
34)、所采用的谱为jonswap谱;其表达式如下:
[0026][0027]
其中:t
p
表示谱峰周期,s;hs表示有义波高,m;γ表示谱峰提升因子,取3.3;σ表示峰形参数:当ω≤ω
p
,σ=0.07;当ω>ω
p
,σ=0.09。
[0028]
进一步的,在步骤(3)中,所述通用型fpso的各个自由度的加速度运动方式有下列几种:
[0029]
纵荡加速度a
surge
:通用型fpso沿x轴晃动产生的加速度;
[0030]
横荡加速度a
sway
:通用型fpso沿y轴晃动产生的加速度;
[0031]
垂荡加速度a
heave
:通用型fpso沿z轴晃动产生的加速度;
[0032]
横摇加速度a
roll
:通用型fpso沿x轴摇摆产生的加速度;
[0033]
纵摇加速度a
pitch
:通用型fpso沿y轴摇摆产生的加速度;
[0034]
所述纵荡加速度a
surge
、横荡加速度a
sway
、垂荡加速度a
heave
、横摇加速度a
roll
、纵摇加速度a
pitch
以及任意位置处的纵向加速度a
x-env
、横向加速度a
y-env
、垂向加速度a
z-env
计算公式如下:
[0035][0036][0037]
[0038][0039][0040][0041][0042][0043]
其中:g表示重力加速度常数,取为9.81m/s2;θ表示船舶横摇运动的横摇角;t
θ
表示横摇运动的横摇周期,与横摇回转半径和初稳性高度有关;表示纵摇运动的纵摇角;表示纵摇运动的纵摇周期,与船长和不同装载条件下吃水与结构吃水的比值有关;b表示船宽;l表示船长;f
t
表示实际工况下吃水与结构吃水之比;a
pitch_x
表示由纵摇产生的纵向加速度,m/s2;a
roll_y
表示由横摇产生的横向加速度,m/s2;a
pitch_z
表示由纵摇产生的垂向加速度,m/s2;a
roll_z
表示由横摇产生的垂向加速度,m/s2。
[0044]
进一步的,在步骤(4)中,所述误差分析过程为:计算运动加速度公式计算值和加速度预报值之差a,并将其与最小误差d比较,其中,最小误差d定义为其公式计算值b所在量级的10-2
倍,即:
[0045]
d~10-2b[0046]
进一步的,在步骤(5)中,所述引入修正系数fi的确定方法具体如下所述:
[0047]
当运动加速度计算值和加速度预报值之差大于最小误差d时,需对公式进行修正,引入修正系数fi,其中修正系数fi与船长l、型宽b、型深d、设计吃水t
sc
、实际吃水t
lc
、cw为水线面系数、cb为方形系数;
[0048]
其中,fi(i=1,2,3,4,5,6,7,8)分别表示纵荡、横荡、垂荡、纵摇、横摇加速度以及任意位置处纵向加速度、横向加速度、垂向加速度的修正系数,其数学模型可表示为:
[0049]fi
=fi(l,b,d,t
lc
,t
sc
,cw,cb);
[0050]
具体的,修正系数fi的确定方法具体如下:
[0051]
采用统计学中的相关性分析方法以及回归方法;其中相关性分析方法主要用于判断因变量fi与自变量l,b,d,t
lc
,t
sc
,cw,cb之间有无联系;回归方法是将相关性强的变量与因变量fi之间的关系用函数方式表达出来;
[0052]
函数关系可表达为:
[0053]fi
=f(l、b、d、t
lc
、t
sc
、cw、cb)
[0054]
将回归后的修正系数fi代入原加速度计算公式,得到新的加速度计算公式。
[0055]
进一步的,根据得到的修正后的加速度计算公式,代入通用型fpso的船长、型宽、型深,不同工况下的设计吃水、结构吃水、排水量等参数重新计算加速度值;
[0056]
按照步骤(6)所述与加速度预报值进行比较,并重新分析其误差,与最小误差d比
较。对于误差大于d的加速度值进行重新修正如此循环往复,直到其两者差值小于最小误差d为止;
[0057]
对于运动加速度计算值和加速度预报值之差小于最小误差d时,则认为两者计算值相吻合,可直接使用。
[0058]
进一步的,在步骤(7)中,所述用修正后的加速度计算公式求得的船体运动的加速度以均布载荷的方式施加在管路上,并通过应力分析软件caesarⅱ分析其对管道应力的影响。
[0059]
本发明的有益效果是:本发明的特点是:1、对通用型fpso的重心处加速度和任意位置处加速度计算公式进行修正,在后续计算其甲板处管道应力时,使加速度载荷的计算更为便捷;2、采用修正后的任意位置处的加速度计算公式计算通用型fpso不同位置处的管道所承受的加速度载荷,其结果更为精确,可以提高管道的安全性能。
附图说明
[0060]
图1是本发明的操作流程图;
[0061]
图2是本发明中船舶在不同浪向下六个自由度的运动示意图;
[0062]
图3是本发明中船舶在不同浪向下六个自由度的加速度时历曲线图;
[0063]
图4是本发明中船舶指定位置处在不同浪向下六个自由度的幅频响应曲线;
[0064]
图5是本发明中船舶指定位置处在不同浪向下六个自由度的加速度时历曲线。
具体实施方式
[0065]
为了更清楚地说明本发明的技术方案,下面将对本发明中进行进一步的叙述;显而易见地,下面描述中的仅仅是一部分的实施例,对于本领域的普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些将本发明所述的技术方案应用于其它类似情景;为了更清楚地说明本发明的技术方案,下面结合附图对本发明的技术方案做进一步的详细说明:
[0066]
考虑到通用型fpso在海上航行时,面对的环境载荷多种多样,为简化计算fpso管路系统所受的加速度载荷计算方法,对船级社所给出的加速度计算公式进行适应度研究,并修正,因此在本发明实例中提供了一种用于管道应力分析的加速度载荷计算公式修正方法;
[0067]
如图2所示,在将fpso主要参数输入到ansys aqwa中,求得fpso在不同浪向下不同自由度的幅值响应曲线,即rao曲线。
[0068]
如图3所示,对fpso进行时域分析,可得其加速度响应,经过水动力计算后,可以得到各个自由度的加速度时历曲线。
[0069]
如图4所示,在软件sesam中,可以求出fpso在任意位置处、不同浪向下的各个自由度加速度幅频响应曲线。
[0070]
如图5所示,经过时域分析,可得任意位置处加速度时历曲线。
[0071]
运用sesam软件对各个自由度的加速度进行长期预报,可得不同超越概率下的加速度的长期预报值,在计算过程中,基于如下假定:
[0072]
31)、浪向角为0
°
~180
°
,采取的计算浪向间隔为15
°
;
[0073]
32)、波浪周期为2~62s,时间间隔为1.2s;
[0074]
33)、所采用的谱为jonswap谱;其表达式如下:
[0075][0076]
其中:t
p
为谱峰周期,s;hs为有义波高,m;γ为谱峰提升因子,取3.3;σ为峰形参数:当ω≤ω
p
,σ=0.07;当ω>ω
p
,σ=0.09。
[0077]
如表1所示为sesam软件计算而得的各个自由度加速度运动分量对应的长期值:
[0078]
表1加速度分量对应的长期值
[0079] 10-2
超越概率10-8
超越概率概率系数heave(垂荡)4.840e+001.968e+010.246pitch(纵摇)4.044e-021.587e-010.255roll(横摇)1.814e-017.453e-010.243surge(纵荡)9.056e-016.275e+000.144sway(横荡)2.707e+001.127e+010.240
[0080]
如表2所示为加速度公式计算值、加速度预报值以及二者之差,其中加速度公式计算值为纵荡a
surge
、横荡a
sway
、垂荡a
heave
、横摇a
roll
、纵摇a
pitch
运动加速度,计算公式如下:
[0081][0082][0083][0084][0085][0086][0087][0088][0089]
其中:g:重力加速度常数,取为9.81m/s2;θ:船舶横摇运动的横摇角;t
θ
:横摇运动的横摇周期,与横摇回转半径和初稳性高度有关;纵摇运动的纵摇角;纵摇运动的纵摇周期,与船长和不同装载条件下吃水与结构吃水的比值有关;b:船宽;l:总长;f
t
:实际工
况下吃水与结构吃水之比;a
pitch_x
表示由纵摇产生的纵向加速度,m/s2;a
roll_y
表示由横摇产生的横向加速度,m/s2;a
pitch_z
表示由纵摇产生的垂向加速度,m/s2;a
roll_z
表示由横摇产生的垂向加速度,m/s2。
[0090]
根据重心处软件的加速度预报值和利用加速度计算公式计算得的加速度计算结果,并计算两者误差,如表2所示:
[0091]
表2重心处软件仿真值与公式计算值及其误差
[0092][0093]
根据表2所述的误差为运动加速度公式计算值和软件仿真值之差a,并将其与最小误差d比较,其中最小误差d定义为其公式计算值所在量级的10-2
倍,即:
[0094]
d~10-2b[0095]
当运动加速度计算值和加速度预报值之差大于最小误差d时,需要对公式进行修正,引入修正系数fi,其中修正系数fi与船长l、型宽b、型深d、设计吃水t
sc
、实际吃水t
lc
、cw为水线面系数(指设计吃水)、cb为方形系数;其中fi(i=1,2,3,4,5,6,7,8)分别表示纵荡、横荡、垂荡、纵摇、横摇加速度以及任意位置处纵向加速度、横向加速度、垂向加速度的修正系数,其数学模型可以表示为:
[0096]fi
=fi(l,b,d,t
lc
,t
sc
,cw,cb)
[0097]
其次分析l,b,d,t
lc
,t
sc
,cw,cb在满载工况下的相关性,采用统计学中的相关性分析方法以及回归方法。其中相关性分析方法主要用于判断因变量fi与自变量l,b,d,t
lc
,t
sc
,cw,cb之间有无联系;回归方法是将相关性强的变量与因变量fi之间的关系用函数方式表达出来。
[0098]
在进行相关性分析时,另外选取五艘船与通用型fpso作为分析样本,涵盖大、中、小型船舶。
[0099]
在对重心处加速度公式进行修正时,以船舶横摇加速度为例,对其进行相关性分析,分析结果如表3所示:
[0100]
表3横摇加速度修正系数f5的相关性分析结果
[0101][0102]
表中f
bl
为船宽b与船长l的比值,f
tl
为实际吃水t
lc
与船长l的比值。
[0103]
表3中,l、b、d的皮尔逊相关性最大仅为0.47,说明其与f5的相关性不显著,t
lc
与t
sc
的皮尔逊相关性达到了0.84,根据皮尔逊相关系数取值范围的判断标准(相关性大于0.8为
极强),t
lc
、t
sc
和f5的相关性极强;f
bl
相关性较弱,f
tl
中显著性为0.075》0.05,则说明了其与f5的相关性不显著。
[0104]
因此,与修正系数f5的相关性强的变量为t
lc
、t
sc
。
[0105]
接下来对其进行回归分析,表4为其回归分析结果:
[0106]
表4横摇加速度修正系数f5的回归分析结果
[0107]
r值r2标准估算的误差durbin-waston0.9310.8670.012.644
[0108]
r:度量复相关程度的指标,复相关系数越大(最大为1),表明要素或变量之间的线性相关程度越密切。
[0109]
r2:用来判断一个多元线性回归方程的拟合程度;用来说明用自变量解释因变量变异的程度(所占比例)。其值越接近1,表明拟合程度越好。
[0110]
标准估算的误差:误差的值越小,则估计量与其真实值的近似误差越小。
[0111]
durbin-watson检查值:通常认为,durbin-watson检查值分布在0-4之间,越接近2,观测值相互独立的可能性越大。
[0112]
表4说明t
lc
、t
sc
和f5的拟合程度高,误差小。
[0113]
横摇加速度修正系数拟合后的函数关系式为:f5=1.68+6.04f
t
,其中f
t
为船舶实际吃水t
lc
与结构吃水t
sc
的比值。
[0114]
根据以上相关性分析和回归分析方法,可以计算得出纵荡加速度修正系数f1拟合后的函数关系式:f1=0.52f
t
+0.19
[0115]
横荡加速度修正系数f2拟合后的函数关系式:f2=3.04+6.26f
bl
+5.42f
tl
[0116]
垂荡加速度修正系数f3拟合后的函数关系式:f3=2.3f
bl
+6.2f
tl-0.85
[0117]
纵摇加速度的修正系数f4与l,b,d,t
lc
,t
sc
,f
bl
,f
tl
相关性均不高,但与f
bl
和cb的共同作用时的相关性非常显著。其拟合后的函数关系式为:
[0118]
f4=6.26(f
bl
·
cb)
1/5-3.23
[0119]
由以上各个自由度的拟合后的加速度修正系数,可得修正后的重心处加速度计算公式,可表示为:
[0120][0121][0122][0123][0124][0125]
最后将fpso主要参数重新代入修正后的公式,重新计算,得到修正后的加速度的
值,如表5所示:
[0126]
表5修正后的加速度值
[0127][0128]
将纵荡加速度修正后的误差a'与最小误差d比较,误差a'的量级为10-4,最小误差d所在量级为10-4
,说明修正后的加速度公式计算的误差a'符合要求;同样的方法可以说明修正后的横荡加速度、垂荡加速度、横摇加速度、纵摇加速度公式也满足最小误差d的要求,可直接使用。
[0129]
在对任意位置处加速度计算公式进行修正时,选取甲板上任意一点(取坐标(70,0,0))分别求其加速度计算值和软件仿真值,其结果如表6所示:
[0130]
表6任意位置处加速度计算值与软件仿真值及误差
[0131][0132]
将软件仿真出的各个方向的加速度代入任意位置处加速度计算公式中,可得合成后的纵向、横向、垂向加速度,如表7所示:
[0133]
表7软件仿真值、公式计算值及其误差
[0134][0135]
由表7可知,软件仿真值与公式计算值之间存在较大误差,因此需要修正。
[0136]
按照重心处加速度公式修正方法,可得船舶任意位置处纵向加速度修正系数f6、横向加速度修正系数f7、垂向加速度修正系数f8的表达式。纵向加速度修正系数f6与f
bl
和f
tl
的相关性较强,回归后修正系数函数表达式为:f6=0.264+2.12f
bl
+0.78f
tl
[0137]
横向加速度修正系数f7与f
bl
相关性较强,回归后的修正系数函数表达式为:f7=0.66+2.39f
bl
[0138]
垂向加速度修正系数f8与f
bl
和f
tl
的相关性较强,回归后修正系数函数表达式为:f8=0.82+1.25f
bl
+1.42f
tl
[0139]
拟合后的任意位置处的加速度计算公式为:
[0140][0141][0142][0143]
将通用型fpso的主要参数重新代入修正后的任意位置处的加速度计算公式,得到新的加速度计算值和软件仿真值之间的误差关系,如表8所示:
[0144]
表8修正后的加速度公式计算值和软件仿真值
[0145][0146][0147]
将修正后的纵向加速度误差a'与最小误差d比较,误差a'的量级为10-4,最小误差d所在量级为10-4
,说明修正后的加速度公式计算的误差a'符合要求;同样的方法可以说明修正后的横向、垂向加速度公式也满足最小误差d的要求,可直接使用。
[0148]
最后,应当理解的是,本发明中所述实施例仅用以说明本发明实施例的原则;其他的变形也可能属于本发明的范围;因此,作为示例而非限制,本发明实施例的替代配置可视为与本发明的教导一致;相应地,本发明的实施例不限于本发明明确介绍和描述的实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1