车流量实时统计方法、装置、电子设备以及存储介质
1.本发明涉及目标跟踪检测技术领域,尤其涉及一种车流量实时统计 方法、装置、电子设备以及存储介质。
背景技术:
2.交通拥堵是困扰当前城市交通的重要难题,随着国民经济的快速发 展和城市化进程的不断加快,日益增长的交通需求和城市道路基础设施 建设将会成为当前城市交通的主要矛盾,交通拥挤和阻塞现象必然会频 繁发生,导致影响人们的工作和生活质量。
3.目前,为了减少交通拥堵现象,主要是根据传统的交通拥堵传播分 析方法,一般利用交通专家的经验,根据道路网络的结构,分析提取预 判可能发生的交通拥堵。由于主要是依赖于人的主观经验,交通拥堵分 析结果不准确,而且是只能实行小范围面积内的拥堵获取分析,交通拥 堵获取效率低,车主出行时间增长,出行成本高。
4.因此,现有技术中对车流量的判断主要是人为的直观判断,存在无 法精准地实时获取道路车流量的问题。
技术实现要素:
5.有鉴于此,有必要提供一种车流量实时统计方法、装置、电子设备 以及存储介质,用以解决现有技术中无法精准地实时获取道路车流量的 问题。
6.为了解决上述问题,本发明提供一种车流量实时统计方法,包括:
7.获取道路视频,并基于车辆检测模型,确定道路视频中的车辆位置 框;
8.根据车辆位置框,基于卷积神经网络,确定车辆位置框的特征向量;
9.根据车辆位置框,基于卡尔曼滤波算法,确定车辆位置框的可能位 置框;
10.根据特征向量和可能位置框,基于匈牙利算法,确定车辆位置框的 id编号;
11.根据id编号,确定道路视频中的车辆流量。
12.进一步地,获取道路视频,并基于车辆检测模型,确定道路视频中 的车辆位置框,包括:
13.获取多个道路视频样本;
14.建立初始车辆检测模型,初始车辆检测模型包括支柱网络层、颈部 结构层及头部输出层;
15.将多个道路视频样本输入至初始车辆检测模型,输出多个道路视频 样本对应的多个车辆位置框样本,训练初始车辆检测模型,得到训练完 备的车辆检测模型;
16.将道路视频输入至训练完备的车辆检测模型,确定道路视频中的车 辆位置框。
17.进一步地,将多个道路视频样本输入至初始车辆检测模型,输出多 个道路视频样本对应的多个车辆位置框样本,包括:
18.根据多个道路视频样本,进行分帧处理,得到对应的多组车辆图片 样本;
19.将多组车辆图片样本输入至支柱网络层,通过focus切片处理,提 取多组车辆图
片样本的多组图片特征;
20.将多组图片特征输入至颈部结构层,将多组图片特征中的高层特征 上采样和低层特征,分别进行拼接融合,得到多组新尺度特征;
21.将多组新尺度特征输入至头部输出层,得到多个道路视频样本对应 的多个车辆位置框样本。
22.进一步地,训练初始车辆检测模型,得到训练完备的车辆检测模型, 之后还包括:
23.获取训练完备的车辆检测模型的置信度损失、定位损失及分类损失;
24.根据置信度损失、定位损失及分类损失,确定训练完备的车辆检测 模型的总损失函数。
25.进一步地,根据车辆位置框,基于卡尔曼滤波算法,确定车辆位置 框的可能位置框,包括:
26.根据上一帧图像中的车辆位置框,基于卡尔曼滤波方程,确定当前 车辆位置框的可能位置框;
27.根据可能位置框和当前帧图像中的车辆位置框,更新确定卡尔曼滤 波公式;
28.根据卡尔曼滤波公式,确定车辆位置框的可能位置框。
29.进一步地,根据特征向量和可能位置框,基于匈牙利算法,确定车 辆位置框的id编号,包括:
30.获取上一帧图像中的车辆位置框的第一id编号;
31.根据特征向量和可能位置框,基于匈牙利算法,确定当前帧图像中 的车辆位置框的第二id编号;其中,若第二id编号与第一id编号对应 同一车辆位置框,则第二id编号与第一id编号对应相同;若第二id编 号与第一id编号对应不同的车辆位置框,则第二id编号与所有第一id 编号都不相同。
32.进一步地,根据id编号,确定道路视频中的车辆流量,包括:
33.根据id编号中不同编号的数量,确定道路视频中的车辆数量;
34.根据车辆数量和道路视频的时常,通过作商,确定道路视频中的车 辆流量。
35.为了解决上述问题,本发明还提供一种车流量获取装置,包括:
36.车辆位置框获取模块,用于获取道路视频,并基于车辆检测模型, 确定道路视频中的车辆位置框;
37.特征向量获取模块,用于根据车辆位置框,基于卷积神经网络,确 定车辆位置框的特征向量;
38.可能位置框获取模块,用于根据车辆位置框,基于卡尔曼滤波算法, 确定车辆位置框的可能位置框;
39.id编号确定模块,用于根据特征向量和可能位置框,基于匈牙利算 法,确定车辆位置框的id编号;
40.车辆流量确定模块,用于根据id编号,确定道路视频中的车辆流量。
41.本发明还提供一种电子设备,包括处理器以及存储器,存储器上存 储有计算机程序,计算机程序被处理器执行时,实现如上述任一技术方 案的车流量实时统计方法。
42.本发明还提供一种计算机可读存储介质,程序介质存储有计算机程 序指令,当计算机程序指令被计算机执行时,实现如上述任一技术方案 的车流量实时统计方法。
43.采用上述实施例的有益效果是:本发明提供一种车流量实时统计方 法、装置、电子设备以及存储介质,该方法包括:获取道路视频,并基 于车辆检测模型,确定道路视频中的车辆位置框;根据车辆位置框,基 于卷积神经网络,确定车辆位置框的特征向量;根据车辆位置框,基于 卡尔曼滤波算法,确定车辆位置框的可能位置框;根据特征向量和可能 位置框,基于匈牙利算法,确定车辆位置框的id编号;根据id编号, 确定道路视频中的车辆流量。通过车辆检测模型对道路视频中的车辆进 行初步识别,排除了环境等外部参数的影响;通过卷积神经网络进一步 获取车辆的特征,能够有效保证车辆位置框的准确性,提高统计车辆流 量的准确性;通过卡尔曼滤波算法和匈牙利算法对车辆位置框进行匹配 和编号,能够有效保证同一车辆在所有图像中的唯一性,保证编号的准 确性,从而有效保证最终得到的车辆流量的精确度。
附图说明
44.图1为本发明提供的车流量实时统计方法一实施例的流程示意图;
45.图2为本发明提供的确定道路视频中的车辆位置框一实施例的流程 示意图;
46.图3为本发明提供的获取车辆位置框样本一实施例的流程示意图;
47.图4为本发明提供的确定车辆位置框的可能位置框一实施例的流程 示意图;
48.图5为本发明提供的确定车辆位置框的id编号一实施例的流程示意 图;
49.图6为本发明提供的车流量获取装置一实施例的结构框图;
50.图7为本发明提供的电子设备一实施例的结构框图。
具体实施方式
51.下面结合附图来具体描述本发明的优选实施例,其中,附图构成本 申请一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用 于限定本发明的范围。
52.在陈述实施例之前,先对关于交通流量进行阐述:
53.交通流量是指在选定时间段内通过道路某一地点、某一断面或某一 车道的交通实体数。
54.目前,为了减少交通拥堵现象,避免交通流量过大,主要是根据经 验分析提取预判可能发生的交通拥堵,主观性较强,预判结果的精确度 不高。因此,现有技术中对车流量的判断时,存在无法精准地实时获取 道路车流量的问题。
55.为了精准地实时获取道路车流量,本发明提供了一种车流量实时统 计方法、装置、电子设备以及存储介质,以下分别进行详细说明。
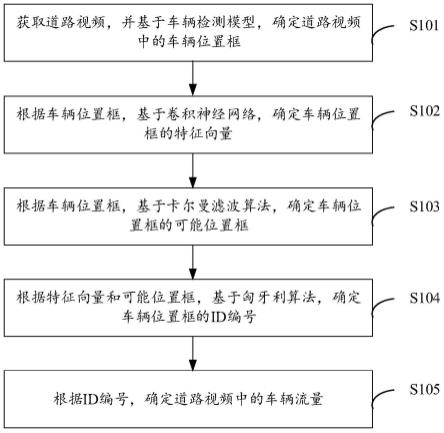
56.如图1所示,图1为本发明提供的车流量实时统计方法一实施例的 流程示意图,车流量实时统计方法包括:
57.步骤s101:获取道路视频,并基于车辆检测模型,确定道路视频中 的车辆位置框。
58.步骤s102:根据车辆位置框,基于卷积神经网络,确定车辆位置框 的特征向量。
59.步骤s103:根据车辆位置框,基于卡尔曼滤波算法,确定车辆位置 框的可能位置框。
60.步骤s104:根据特征向量和可能位置框,基于匈牙利算法,确定车 辆位置框的id编号。
61.步骤s105:根据id编号,确定道路视频中的车辆流量。
62.本实施例中,首先,利用车辆检测模型对道路视频中的每一帧图像 进行处理,提取到每一帧图像的车辆位置框;其次,利用卷积神经网络 提取车辆位置框中的特征向量,能够有效地提高对车辆位置框中的车辆 信息的识别精度;然后,基于卡尔曼滤波算法,对上一帧图像中的车辆 位置框在其相邻的后一帧图像中的可能位置框进行预判;并根据匈牙利 算法,将上一帧图像中的车辆位置框和其相邻的后一帧图像中的车辆位 置框进行一一对应识别并编号,使得同一辆车在所有的车辆位置框中的 编号一致,对新出现的车辆位置框赋予新的编号,即,获取到所有车辆 位置框的id编号;最后,基于所有的id编号确定道路视频中出现的车 辆数量,并根据车辆数量和道路视频的时长,确定道路视频中的车辆流 量。
63.本实施例中,通过车辆检测模型对道路视频中的车辆进行初步识别, 排除了环境等外部参数的影响;通过卷积神经网络进一步获取车辆的特 征,能够有效保证车辆位置框的准确性,提高统计车辆流量的准确性; 通过卡尔曼滤波算法和匈牙利算法对车辆位置框进行匹配和编号,能够 有效保证同一车辆在所有图像中的唯一性,保证编号的准确性,从而有 效保证最终得到的车辆流量的精确度。
64.作为优选的实施例,在步骤s101中,为了确定道路视频中的车辆位 置框,如图2所示,图2为本发明提供的确定道路视频中的车辆位置框 一实施例的流程示意图,确定多个车辆图片系列包括:
65.步骤s111:获取多个道路视频样本。
66.步骤s112:建立初始车辆检测模型,初始车辆检测模型包括支柱网 络层、颈部结构层及头部输出层。
67.步骤s113:将多个道路视频样本输入至初始车辆检测模型,输出多 个道路视频样本对应的多个车辆位置框样本,训练初始车辆检测模型, 得到训练完备的车辆检测模型。
68.步骤s114:将多个道路视频输入至训练完备的车辆检测模型,确定 道路视频中的车辆位置框。
69.本实施例中,通过在初始车辆检测模型中输入多个道路视频样本, 输出对应的多个车辆位置框样本,迭代训练初始车辆检测模型,得到训 练完备的车辆检测模型,从而实现得到的道路视频中的车辆位置框。
70.作为优选的实施例,在步骤s111中,为了提高道路视频样本中的数 据的丰富性,通过mosaic数据增强操作对已有的道路视频样本进行处理。
71.作为优选的实施例,在步骤s113中,为了明确根据初始车辆检测模 型得到的车辆位置框样本的步骤,如图3所示,图3为本发明提供的获 取车辆位置框样本一实施例的流程示意图,获取车辆位置框样本包括:
72.步骤s1131:根据多个道路视频样本,进行分帧处理,得到对应的多 组车辆图片样本。
73.步骤s1132:将多组车辆图片样本输入至支柱网络层,通过focus切 片处理,提取多组车辆图片样本的多组图片特征。
74.步骤s1133:将多组图片特征输入至颈部结构层,将多组图片特征中 的高层特征上采样和低层特征,分别进行拼接融合,得到多组新尺度特 征。
75.步骤s1134:将多组新尺度特征输入至头部输出层,得到多个道路视 频样本对应的多个车辆位置框样本。
76.本实施例中,首先,将多个道路视频样本进行分解,得到对应的多 组车辆图片样本;其次,基于初始车辆检测模型中的支柱网络层,提取 出多组图片特征;然后,基于初始车辆检测模型中的颈部结构层,将图 片特征中的高层特征上采样和低层特征进行拼接融合,得到多组新尺度 特征;最后,基于初始车辆检测模型中的头部输出层,根据多组新尺度 特征确定多个车辆位置框样本。
77.本实施例中,通过将道路视频分解成一帧一帧的图片,然后再对图 片进行特征提取,并根据图片特征确定对应的车辆位置框;将视频转化 成图片进行处理,能够充分地利用初始车辆检测模型,实现根据道路视 频确定对应的车辆位置框。
78.在一个具体的实施例中,focus结构对图片进行切片操作,输出 304*304*12的特征图并进行卷积操作,然后,支柱网络层采集图片特征; 颈部结构层采用特征图金字塔网络fpn,将高层特征上采样和低层特征 拼接融合为一个新尺度的特征;头部输出层完成对目标检测结果的输出。
79.作为优选的实施例,在步骤s113中,为了对得到的训练完备的车辆 检测模型,进行有效度检测,即,判断训练完备的车辆检测模型的效果, 还设置了总损失函数进行评判。
80.在一个具体的实施例中,总损失函数中包括的参数有:训练完备的 车辆检测模型的置信度损失、定位损失及分类损失。
81.进一步地,根据置信度损失、定位损失及分类损失,确定训练完备 的车辆检测模型的总损失函数的计算公式为:
82.loss=a*lossobj+b*lossbox+c*losscls
83.其中,loss为车辆检测模型的总损失,lossobj为车辆检测模型的置 信度损失,lossbox为车辆检测模型的定位损失,losscls为车辆检测模型 的分类损失。
84.在一个具体的实施例中,使用ciou loss计算车辆检测模型的边界框 损失,用bce loss计算车辆检测模型的置信度损失和分类损失。
85.在一个具体的实施例中,为了更加简洁明了地展示出车辆检测模型 的训练成果,还通过colab平台上tensorboard工具将训练结果进行可视 化显示。其中,可视化显示的内容包括总损失函数的计算结果。
86.通过上述方式,对车辆检测模型的训练效果从多个维度进行评判并 及时展示,不仅便于及时获取到车辆检测模型的有效度,还能根据评判 结果调整车辆检测模型中的参数,提高车辆检测模型的有效度。
87.作为优选的实施例,在步骤s102中,卷积神经网络包括但不限于10 层的卷积神经网络。
88.作为优选的实施例,在步骤s103中,为了确定车辆位置框的可能位 置框,如图4所示,图4为本发明提供的确定车辆位置框的可能位置框 一实施例的流程示意图,确定车辆位置框的可能位置框包括:
89.步骤s131:根据上一帧图像中的车辆位置框,基于卡尔曼滤波方程, 确定当前车辆位置框的可能位置框。
90.步骤s132:根据可能位置框和当前帧图像中的车辆位置框,更新确 定卡尔曼滤波
公式。
91.步骤s133:根据卡尔曼滤波公式,确定车辆位置框的可能位置框。
92.本实施例中,通过已存在的较为成熟的卡尔曼滤波方程对车辆位置 框进行处理,预测相邻图像中的前一帧图像的车辆位置框在后一帧图像 中的可能位置框;然后,根据后一帧图像中的实际车辆位置框,对卡尔 曼滤波方程进行进一步优化更新,得到卡尔曼滤波公式;最后,根据卡 尔曼滤波公式,确定车辆位置框的可能位置框。
93.本实施例中,通过对卡尔曼滤波方程进行优化更新确定卡尔曼滤波 公式,能够有效提高得到的车辆位置框的可能位置框的精度。
94.在一具体实施例中,卡尔曼滤波算法中的卡尔曼滤波方程为:其中,x
k-1
表示上一时刻系统状态的最优估计,xk为当前时刻系统状态的最优估计。p
k-1
为上一时刻的估计误差的协方差矩阵。pk为当前时刻的估计误差的协方差阵。fk为状态迁移矩阵,bk控制输入矩阵,uk为系统的控制输入,qk为系统噪声的协方差矩阵。
95.在一个具体的实施例中,优化更新后的卡尔曼滤波公式为:优化更新后的卡尔曼滤波公式为:优化更新后的卡尔曼滤波公式为:其中,zk为当前时刻系统的观测值,hk为状态迁移矩阵,将当前系统状态映射到观测空间,统一获取值和观测值两者的度量单位。rk为观测值噪声的协方差矩阵,k为卡尔曼增益。
[0096][0097][0098][0099][0100][0101][0102][0103]
作为优选的实施例,在步骤s104中,为了确定车辆位置框的id编 号,如图5所示,图5为本发明提供的确定车辆位置框的id编号一实施 例的流程示意图,确定车辆位置框的id编号包括:
[0104]
步骤s141:获取上一帧图像中的车辆位置框的第一id编号。
[0105]
步骤s142:根据特征向量和可能位置框,基于匈牙利算法,确定当 前帧图像中的车辆位置框的第二id编号;其中,若第二id编号与第一 id编号对应同一车辆位置框,则第二id编号与第一id编号对应相同; 若第二id编号与第一id编号对应不同的车辆位置框,则第二id编号与 所有第一id编号都不相同。
[0106]
本实施例中,先对上一帧图像中的多个车辆位置框进行编号,得到 第一id编号,
然后通过对匈牙利算法,对当前帧图像中的车辆位置框与 第一id编号对应的车辆位置框进行一一匹配,确定当前帧图像中的车辆 位置框对应的第二id编号,由于匈牙利算法能够最大限度地保证匹配的 精度,因此,上述方式能够保证最终得到的id编号的准确性。
[0107]
在一个具体的实施例中,为了保证第一id编号与第二id编号的匹 配精度,需要进行以下步骤:
[0108]
步骤一:初始化二分图集合u和v,设定集合u和v中的id编号, u为可能位置框,v为当前帧的检测框,画出两集合元素之间所有可能 的匹配关系。
[0109]
步骤二:按照id的顺序依次进行匹配,首先将可能位置框集合u中 目标id为1与当前帧的检测框集合v中id为1的进行匹配,接着对集 合u中的id为2的可能位置框进行匹配。
[0110]
步骤三:然后对集合u中的id为3的进行匹配,但此时虽然v中 的id为1和2的检测框可以与id为3的可能位置框匹配,但是这两个 在之前就已经匹配过,为了使得集合u中的id=3可以匹配到v中的目 标,需将之前集合u中的id为1的可能位置框匹配另一个目标。
[0111]
步骤四:此时集合u中id为1的可能位置框可以匹配集合v中id 为2的检测框,但这个检测框已经被集合u中id为2的可能位置框匹配, 因此向步骤三一样取消这个匹配,给它匹配集合v中的另一个id为3 检测框。
[0112]
步骤五:返回步骤三,对u集合中id为1和2的可能位置框进行匹 配,id为1、2、3的可能位置框都得到匹配。
[0113]
步骤六:最后对集合u中id为4的目标框进行匹配,与上述步骤相 同,但未能得到更大匹配数(大于已有匹配数3),也就是不存在增广路 径。所以u集合中id为4的可能位置框未能匹配,在当前帧中消失,同 时v集合中id为4的检测框包含的车辆为新出现的车辆目标。
[0114]
作为优选的实施例,在步骤s105中,在得到道路视频中的图像对应 的所有id编号后,还需要对所有id编号的数量进行统计,然后根据道 路视频的时长,将id编号的数量与时长进行作商,从而最终确定道路视 频中的车辆流量。
[0115]
当道路视频的时长靠近无限小时,车辆流量就越能代表某一时刻的 车流量。
[0116]
根据上述方式,通过车辆检测模型对道路视频中的车辆进行初步识 别,排除了环境等外部参数的影响;通过卷积神经网络进一步获取车辆 的特征,能够有效保证车辆位置框的准确性,提高统计车辆流量的准确 性;通过卡尔曼滤波算法和匈牙利算法对车辆位置框进行匹配和编号, 能够有效保证同一车辆在所有图像中的唯一性,保证编号的准确性,从 而有效保证最终得到的车辆流量的精确度。
[0117]
本发明实施例提供了一种车流量获取装置,如图6所示,图6为本 发明提供的车流量获取装置一实施例的结构框图,车流量获取装置600 包括:
[0118]
车辆位置框获取模块601,用于获取道路视频,并基于车辆检测模型, 确定道路视频中的车辆位置框;
[0119]
特征向量获取模块602,用于根据车辆位置框,基于卷积神经网络, 确定车辆位置框的特征向量;
[0120]
可能位置框获取模块603,用于根据车辆位置框,基于卡尔曼滤波算 法,确定车辆位置框的可能位置框;
[0121]
id编号确定模块604,用于根据特征向量和可能位置框,基于匈牙 利算法,确定车
辆位置框的id编号;
[0122]
车辆流量确定模块605,用于根据id编号,确定道路视频中的车辆 流量。
[0123]
本发明还相应提供了一种电子设备,如图7所示,图7为本发明提 供的电子设备一实施例的结构框图。电子设备700可以是移动终端、桌 上型计算机、笔记本、掌上电脑及服务器等计算设备。电子设备700包 括处理器701以及存储器702,其中,存储器702上存储有车流量实时统 计程序703。
[0124]
存储器702在一些实施例中可以是计算机设备的内部存储单元,例 如计算机设备的硬盘或内存。存储器702在另一些实施例中也可以是计 算机设备的外部存储设备,例如计算机设备上配备的插接式硬盘,智能 存储卡(smart media card,smc),安全数字(secure digital,sd) 卡,闪存卡(flash card)等。进一步地,存储器702还可以既包括计算 机设备的内部存储单元也包括外部存储设备。存储器702用于存储安装 于计算机设备的应用软件及各类数据,例如安装计算机设备的程序代码 等。存储器702还可以用于暂时地存储已经输出或者将要输出的数据。 在一实施例中,车流量实时统计程序703可被处理器701所执行,从而 实现本发明各实施例的车流量实时统计方法。
[0125]
处理器701在一些实施例中可以是一中央处理器(central processingunit,cpu),微处理器或其他数据处理芯片,用于运行存储器702中 存储的程序代码或处理数据,例如执行车流量实时统计程序等。
[0126]
本实施例还提供了一种计算机可读存储介质,其上存储有车流量实 时统计程序,计算机该程序被处理器执行时,实现如上述任一技术方案 所述的车流量实时统计方法。
[0127]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分 流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机 程序可存储于一非易失性计算机可读取存储介质中,该计算机程序在执 行时,可包括如上述各方法的实施例的流程。本技术所提供的各实施例 中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括 非易失性和/或易失性存储器。非易失性存储器可包括只读存储器(rom)、 可编程rom(prom)、电可编程rom(eprom)、电可擦除可编程 rom(eeprom)或闪存。易失性存储器可包括随机存取存储器(ram) 或者外部高速缓冲存储器。作为说明而非局限,ram以多种形式可得, 诸如静态ram(sram)、动态ram(dram)、同步dram(sdram)、 双数据率sdram(ddrsdram)、增强型sdram(esdram)、同 步链路(synchlink)dram(sldram)、存储器总线(rambus)直 接ram(rdram)、直接存储器总线动态ram(drdram)、以及 存储器总线动态ram(rdram)等。
[0128]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围 并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范 围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1