识别车道边沿的方法和电子设备与流程
本申请涉及自动驾驶,尤其涉及一种识别车道边沿的方法和电子设备。
背景技术:
1、车辆自动驾驶系统或自动驾驶辅助系统可提供自动制动(autonomous emergencybraking,aeb)、前方碰撞预警(forward collision warning,fcw)、车道保持辅助(lanekeeping assist,lka)等功能,这些功能的正确使用依赖于车辆可行驶区域的准确识别。车辆可行驶区域通常由车道边沿来划分,即在车道两侧设置车道边沿以标识车辆的可行驶区域。如果对车道边沿的识别准确率不高,将导致车辆可行驶区域的识别准确率较低,进而影响车辆自动驾驶功能的实现。
技术实现思路
1、本申请实施例提供一种识别车道边沿的方法和电子设备,以解决相关技术存在的问题,技术方案如下:
2、第一方面,本申请实施例提供了一种识别车道边沿的方法,包括:
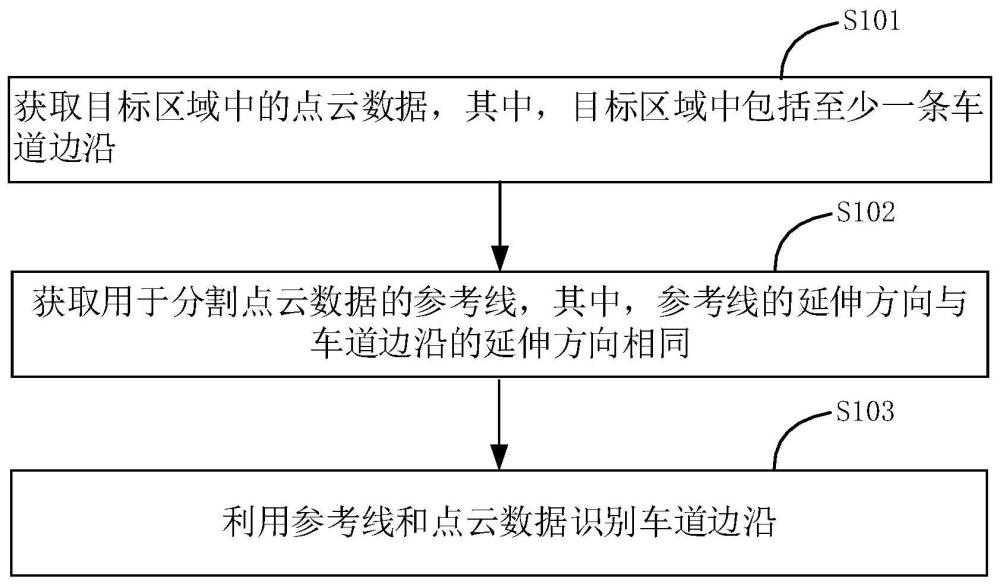
3、获取目标区域中的点云数据,其中,目标区域中包括至少一条车道边沿;
4、获取用于分割点云数据的参考线,其中,参考线的延伸方向与车道边沿的延伸方向相同;
5、利用参考线和点云数据识别车道边沿。
6、第二方面,本申请实施例提供了一种识别车道边沿的电子设备,包括:至少一个处理器;以及与至少一个处理器通信连接的存储器;其中,存储器存储有可被至少一个处理器执行的计算机程序,计算机程序被至少一个处理器执行,以使至少一个处理器能够执行本申请任一实施例的方法。
7、第三方面,本申请实施例提供了一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行本申请任一实施例所述的方法。
8、本申请实施例的技术方案,通过生成与车道边沿延伸方向相同的参考线,进而利用该参考线对稀疏点云数据进行聚类,以识别出车道边沿,不仅可以提高识别准确率,进而提高车辆可行驶区域的识别准确率,又能够实现轻量化计算,降低硬件成本。
9、上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本申请进一步的方面、实施方式和特征将会是容易明白的。
技术特征:
1.一种识别车道边沿的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,获取用于分割所述点云数据的参考线,包括:
3.根据权利要求2所述的方法,其特征在于,所述车道线包括第一车道线和第二车道线,利用所述车道线生成所述参考线,包括:
4.根据权利要求1所述的方法,其特征在于,获取用于分割所述点云数据的参考线,包括:
5.根据权利要求1所述的方法,其特征在于,获取用于分割所述点云数据的参考线,包括:
6.根据权利要求5所述的方法,其特征在于,所述运动轨迹包括所述目标车辆在多个时刻下的位置点,利用所述目标车辆的运动轨迹生成所述参考线,包括:
7.根据权利要求1至6任一项所述的方法,其特征在于,利用所述参考线和所述点云数据识别所述车道边沿,包括:
8.根据权利要求1所述的方法,其特征在于,所述点云数据为静态点云数据。
9.一种识别车道边沿的电子设备,其特征在于,包括:
10.根据权利要求9所述的电子设备,其特征在于,所述处理器包括自动驾驶域控制模块。
11.一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时实现如权利要求1至8中任一项所述的方法。
技术总结
本申请提出一种识别车道边沿的方法和电子设备。该方法包括:获取目标区域中的点云数据,其中,目标区域中包括至少一条车道边沿;获取用于分割点云数据的参考线,其中,参考线的延伸方向与车道边沿的延伸方向相同;利用参考线和点云数据识别车道边沿。本申请实施例的技术方案,通过生成与车道边沿延伸方向相同的参考线,进而利用该参考线对稀疏点云数据进行聚类,以识别出车道边沿,不仅可以提高识别准确率,进而提高车辆可行驶区域的识别准确率,又能够实现轻量化计算,降低硬件成本。
技术研发人员:严达桂
受保护的技术使用者:华人运通(上海)自动驾驶科技有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!