一种面向低轨大型星群的多站局部感知联合定轨方法与流程
1.本发明属于航天测量与控制技术领域,涉及一种面向低轨大型星群的基于多站局部感知信息处理的联合定轨方法。
背景技术:
2.星群是指一组由多颗卫星组成的卫星系统,以协同工作方式构成一个大的“虚拟航天器”,来完成对地观测、互联网通信、战场态势感知等一系列覆盖范围广、连续性要求高的空间任务。近年来,随着小卫星技术的发展,在近地轨道上(low earth orbit,leo)多颗卫星联合组网构成编队、星座或星群的运行模式备受青睐,各种大型星群发展迅猛。“依”星、星链等互联网大型星座快速部署,仅星链就规划了42000颗卫星。与传统单星工作模式相比,星群在成本、性能、以及灵活性和可靠性等方面都有巨大优势;但它也给目前以地基主导的测运控模式带来了巨大挑战。
3.目前,传统航天测控系统仍然依赖地基s频段测控网,主要采用单颗卫星跟踪定轨方式,即多个或单个测控站同时或者交替跟踪卫星,采集的观测数据直接发送至数据中心,数据中心采用单星定轨方式计算卫星轨道并预报未来跟踪计划,发送至测控站引导设备跟踪。传统的单星定轨方式对于单个卫星或数量很少的小规模星群仍然适用;但对于成百上千颗卫星的大型星群,面向单星定轨的数据中心集中处理模式在数据传输和计算资源等方面开销巨大,不能适应未来对星群多目标测控的任务需求。因此,需要针对大型星群应用研究全新的星群联合定轨方案。
技术实现要素:
4.为了克服现有技术中存在的问题,本发明提出一种面向低轨大型星群的多站局部感知联合定轨方法,利用单个测站局部感知数据进行最小二乘滤波处理,生成法方程系统送入数据中心联合定轨,本方案适用于多个测站以及星间链路支持的大型星群的定轨问题。本发明采用广义的星群概念,即卫星编队和星座都是星群的特殊结构。
5.本发明的技术方案为:
6.一种面向低轨大型星群的多站局部感知联合定轨方法,包括步骤如下:
7.步骤1,在定轨弧段,测站处理局部感知的所有原始观测数据,构建多源数据融合的线性化观测方程组;
8.步骤2,各测站应用局部最小二乘滤波器,构建轨道状态估计的法方程系统,所述的法方程系统包括法矩阵和相应的协方差;其中,对于仅地面观测的卫星,构建独立的法方程系统;对于星间链路测量相关的卫星,构建统一的多星法方程系统;
9.步骤3,将各测站法方程系统发送至数据中心,数据中心采用递推最小二乘合并法方程;
10.步骤4,求解合并后的线性方程组,得到轨道状态的最优估计。
11.进一步地,所述多源数据包括测距、瞬时测速、方位角、俯仰角、星间测距的测量数
据。
12.上述测距、瞬时测速、方位角、俯仰角、星间测距的观测矩阵如下:
13.测距ρ:
14.瞬时测速瞬时测速
[0015][0016]
方位角a:
[0017]
仰角e:
[0018]
星间测距r:
[0019]
式中,hr(*)表示各类观测矩阵,即观测值对位置r(x,y,z)的偏导数矩阵;m表示地固坐标系到测站坐标系的转换矩阵,hg为惯性坐标系到地固坐标系的转换矩阵;ρ(ρ
x
,ρy,ρz)表示测站坐标系中站心至卫星距离矢量;卫星a、b之间的星间测距表示为
[0020]
进一步地,所述对于仅测站观测的卫星a,在测站i中,根据测量关系,构建独立法方程系统如下:
[0021]
对卫星a,其待估计状态构建法方程系统
[0022]
或
[0023]
式中,h为m
×
n维观测矩阵,m、n分别是测站i对卫星a的观测值个数、未知轨道参数的个数;满秩rank(h)=n,为设计矩阵,包含各类观测数据类型的矩阵;p为m
×
m维观测权重矩阵,由相应的观测数据类型决定,每类观测数据的权重相同;独立法方程系统的法矩阵
[0024]
独立法方程系统的法矩阵的协方差
[0025]
式中,法矩阵n下标表示测站,上标表示卫星,如表示测站i单站数据生成的卫星a法方程,为后验单位权方差。
[0026]
进一步地,所述对于星间链路和测站联合观测的卫星,在测站i中,测量星间链路相关的卫星,构建多星法方程系统包括
[0027]
多星法方程系统的法矩阵
[0028]
多星法方程系统的协方差
[0029]
式中,观测矩阵h包含各类观测数据类型的矩阵,权重矩阵p中每类观测数据的权重相同;表示测站i跟踪测量相应卫星产生的测量数据集和测站i接收到相应卫星的星间链路收端数据的集合。
[0030]
进一步地,所述步骤3,具体为:
[0031]
(1)对于仅测站观测的卫星,采用递推最小二乘估计单星轨道状态,合并多测站法方程,对于卫星a合并法方程
[0032][0033]
式中,l为涉及相关测站的数量;
[0034]
(2)对于星间链路和测站联合观测的卫星,采用递推最小二乘估计多星轨道状态,合并多测站法方程,对于卫星b、...、d合并法方程
[0035][0036]
式中,h为涉及相关测站的数量。
[0037]
本发明的有益效果是:
[0038]
(1)在测控站处理局部感知观测数据,分散了数据中心的计算量,并且避免了大量的数据传送;
[0039]
(2)数据中心能够不损失精度,获得全局最优轨道状态估计,只需要联合处理测控站的法方程系统,显著减少了计算量;
[0040]
(3)数据中心能够灵活处理各测站法方程系统,可根据数据质量剔除测站。因此,本方法通过在测控站和数据中心的联合处理,在确保定轨精度的前提下,将显著减小数据传输和中心计算的开销,满足大型星群的测控管理需求,适用于多个测站以及星间链路支持的大型星群的定轨问题。
附图说明
[0041]
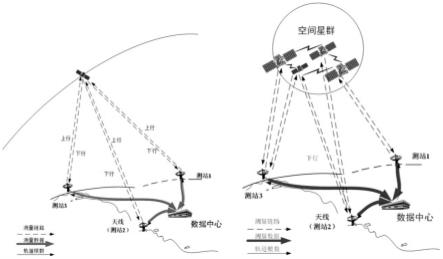
图1是传统单星测定轨和星群测定轨示意图。
[0042]
图2是传统星群定轨方案。
[0043]
图3面向大型星群的局部感知联合定轨方案。
[0044]
图4传统定轨方案的定轨精度(与仿真“真”轨道比较)。
[0045]
图5本发明方案的定轨结果(与仿真“真”轨道比较)。
具体实施方式
[0046]
为了更好地说明本发明的优点,下面结合附图对本发明的具体实施方式作进一步
详细的说明。
[0047]
实施例1:
[0048]
如图3所示,多站和星间链路联合支持星群测量定轨过程如下(为简化问题,以i、j、k三个测站和5颗卫星a、b、c、d、e为例):
[0049]
地面测站:在定轨弧段,测站i跟踪测量卫星a、b、c,产生测量数据集测站j跟踪测量全部5颗卫星,产生测量数据集测站j跟踪测量全部5颗卫星,产生测量数据集测站k跟踪测量卫星c、d、e,产生测量数据集地基测量元素包括测距ρ、测速方位角a和俯仰角e。
[0050]
星间链路:星群中部分卫星(卫星b、c、d)利用星间链路进行双向测距,测量数据在收端下传,则测站i接收到卫星b的星间链路收端数据测站j接收到卫星c的星间链路收端数据测站k接收到卫星d的星间链路收端数据
[0051]
在传统定轨方案中,上述各类数据将全部送至数据中心如图2所示。本实施例中卫星a和卫星e将采取单星定轨方式,处理各自观测数据;卫星b、c、d由于星间链路,将采取多星联合定轨方式,同时处理星间和星地观测数,计算3颗卫星轨道。
[0052]
具体按照以下步骤实施:
[0053]
步骤1:在定轨弧段,测站处理局部感知的所有原始观测数据,构建多源数据融合的线性化观测方程组,包括测距、测速、方位角和俯仰角等测量数据的残差计算,观测矩阵的计算按照式(1)~式(6)。
[0054]
步骤2:各测站应用局部最小二乘滤波器,构建轨道状态估计的法方程系统,包括法矩阵和相应的协方差。对于仅地面观测的卫星,构建独立的法方程系统;对于星间链路测量相关的卫星,构建统一的多星法方程系统;
[0055]
如在测站i中,根据测量关系,构建两组相互独立的法方程系统如下:
[0056]
对卫星a,其待估计状态构建法方程系统如公式(7)、(8)所示。
[0057]
类似的,对于卫星b、c、d,构建法方程系统包括
[0058]
法矩阵协方差
[0059]
观测矩阵和权重矩阵对应相应的观测数据类型。
[0060]
对应测站j、k,以同样的方法构建各自的法方程系统对应测站j、k,以同样的方法构建各自的法方程系统
[0061]
步骤3:各测站法方程系统发送至数据中心,数据中心采用递推最小二乘合并法方程。分成两种情况:
[0062]
(1)对于仅测站观测的卫星,采用单星轨道状态估计方法,合并多站法方程,对于卫星a合并法方程:对于卫星e合并法方程:
[0063]
(2)对于星间链路和测站联合观测的卫星,采用多星轨道状态估计方法,合并多站法方程,对于卫星b、c、d合并法方程
[0064][0065]
步骤4:在数据中心求解合并后的法方程,得到全局最优轨道状态估计。
[0066]
实施例2:
[0067]
针对24颗卫星在8个测站跟踪条件下的定轨问题进行仿真计算,跟踪弧段3天,地基测量包括测距、测速和测角;天基测量包括星间链路测距,传统方案定轨结果如图4,本发明定轨结果如图5,图中p、r、a、c分别表示位置、径向、切向和法向;本发明在定轨精度方面并无明显下降,但能够节省数据传输和中心计算开销。
[0068]
与传统方案相比,优点在于:
①
不损失精度,能得到全局最优状态估计;
②
观测数据在测站处理,不需要发送至数据中心,避免了大量的数据传输;
③
数据中心仅需完成法方程叠加和状态融合估计,计算量显著减小。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1