高塔相机图像几何校正方法和装置与流程
1.本发明涉及遥感技术领域,特别是指一种高塔相机图像几何校正方法和装置。
背景技术:
2.在通信铁塔等高塔上安装光学相机等传感器用于高塔周边区域人类活动监控、植被生长监测等工作,具有时效快、分辨率高、成本低等特点,是生态环境监管的另一种技术手段。高塔光学相机通过扫描拍摄的方式,获得视野范围内360度的周边地物照片的全景矩形照片。通过几何校正将高塔光学相机采集的原始矩形全景图像转换为空间地理位置和尺度准确的圆环状图像,是高塔光学相机开展进一步业务应用的前提。
3.目前,国内外专门针对高塔相机的几何校正方法几乎空白。传统的图像处理方法通常是将矩形图片通过坐标变换的方式转换为圆环形状,这种方式只考虑了常规图片形状上的变换,照片重采样尺度不变。但是高塔相机的成像尺度随视野距离增长呈非线性变化,因此传统重采样尺度不变的坐标变换方式不能满足高塔相机照片尺度校正的需求。
技术实现要素:
4.为解决上述技术问题,本发明提供一种高塔相机图像几何校正方法和装置,通过重新计算全景矩形图像每一列像素的重采样比例系数并进行重采样,解决了高塔相机成像尺度随视野距离增长呈非线性变化的问题,提高了高塔相机图像几何校正的准确性。
5.本发明提供技术方案如下:
6.一种高塔相机图像几何校正方法,所述方法包括:
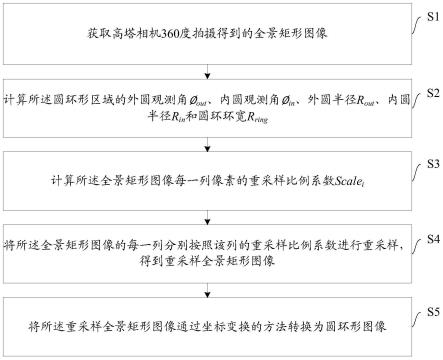
7.s1:获取高塔相机360度拍摄得到的全景矩形图像;其中,所述全景矩形图像的行表示所述高塔相机360度拍摄的圆环形区域的径向,所述全景矩形图像的列表示所述高塔相机360度拍摄的圆环形区域的周向;
8.s2:计算所述圆环形区域的外圆观测角内圆观测角外圆半径r
out
、内圆半径r
in
和圆环环宽r
ring
;
[0009][0010][0011][0012][0013]rring
=r
out-r
in
[0014]
其中,α为所述高塔相机的光轴相对于水平面的俯视角度,为所述高塔相机的视场角,h为所述高塔相机距离地面的垂直高度;
[0015]
s3:计算所述全景矩形图像每一列像素的重采样比例系数scalei;
[0016][0017]
其中,scalei为所述全景矩形图像第i列像素的重采样比例系数,i=1,2,
…
,
oriimg
col
,oriimg
col
为所述全景矩形图像的列数,pixceli为所述全景矩形图像第i列像素的采样尺度;
[0018][0019]
为所述全景矩形图像相邻列像素的采集观测角度间隔;
[0020][0021]
s4:将所述全景矩形图像的每一列分别按照该列的重采样比例系数进行重采样,得到重采样全景矩形图像;
[0022]
s5:将所述重采样全景矩形图像通过坐标变换的方法转换为圆环形图像。
[0023]
进一步的,所述s5包括:
[0024]
s51:计算所述重采样全景矩形图像对应的圆环形区域的圆环环宽r
ring
的像素数p
ring
和圆环形区域的外圆半径r
out
的像素数p
out
;
[0025][0026][0027]
s52:设定所述圆环形图像的中心点坐标(center
x
,centery),其中:
[0028]
center
x
≥p
out
,centery≥p
out
[0029]
s53:将所述重采样全景矩形图像的坐标点(row,col)进行逐像素坐标变换,得到所述圆环形图像对应的坐标点(new
x
,newy);
[0030]
new
x
=center
x
+c*sinθ-0.5
[0031]
newy=center
y-c*cosθ-0.5
[0032]
其中,c=p
out-col,col=1,2,
…
,scaleimg
col
;
[0033]
θ=(row+1)
×
2π/scaleimg
row
,row=1,2,
…
,scaleimg
row
;
[0034]
scaleimg
row
和scaleimg
col
分别为所述重采样全景矩形图像的行数和列数;
[0035]
s54:将所述重采样全景矩形图像的坐标点(row,col)的像素值赋值到所述圆环形图像对应的坐标点(new
x
,newy),得到所述圆环形图像。
[0036]
进一步的,所述s4包括:
[0037]
将所述全景矩形图像的行保持不变,按照每一列的重采样比例系数逐列进行重采样,并依次追加在前一列后面,直至所有列重采样完毕为止,得到所述重采样全景矩形图像。
[0038]
进一步的,所述s1包括:
[0039]
获取高塔相机360度拍摄的图像,并去除无效区域,得到所述全景矩形图像;其中,所述无效区域包括开始拍摄和结束拍摄时的重复拍摄区域以及天际线周边及以外区域。
[0040]
进一步的,所述方法还包括:
[0041]
s6:将所述圆环形图像与遥感影像进行地理配准,得到空间位置准确的高塔相机图像。
[0042]
进一步的,所述s6包括:
[0043]
s61:以所述遥感影像为基准,将所述圆环形图像的圆心的经纬度坐标设定为所述高塔相机中心点在地面的投影点的经纬度坐标;
[0044]
s62:在所述圆环形图像和所述遥感影像上均匀选取特征明显的同名地物点,作为几何校正控制点对;
[0045]
s63:通过几何校正,进行圆环形图像投影变换和地理配准,使得所述圆环形图像和所述遥感影像的几何校正控制点对对准,得到空间位置准确的高塔相机图像。
[0046]
一种高塔相机图像几何校正装置,所述装置包括:
[0047]
全景矩形图像获取模块,用于获取高塔相机360度拍摄得到的全景矩形图像;其中,所述全景矩形图像的行表示所述高塔相机360度拍摄的圆环形区域的径向,所述全景矩形图像的列表示所述高塔相机360度拍摄的圆环形区域的周向;
[0048]
第一计算模块,用于计算所述圆环形区域的外圆观测角内圆观测角外圆半径r
out
、内圆半径r
in
和圆环环宽r
ring
;
[0049][0050][0051][0052][0053]rring
=r
out-r
in
[0054]
其中,α为所述高塔相机的光轴相对于水平面的俯视角度,为所述高塔相机的视场角,h为所述高塔相机距离地面的垂直高度;
[0055]
第二计算模块,用于计算所述全景矩形图像每一列像素的重采样比例系数scalei;
[0056][0057]
其中,scalei为所述全景矩形图像第i列像素的重采样比例系数,i=1,2,
…
,oriimg
col
,oriimg
col
为所述全景矩形图像的列数,pixceli为所述全景矩形图像第i列像素的采样尺度;
[0058][0059]
为所述全景矩形图像相邻列像素的采集观测角度间隔;
[0060][0061]
重采样模块,用于将所述全景矩形图像的每一列分别按照该列的重采样比例系数进行重采样,得到重采样全景矩形图像;
[0062]
图像转换模块,用于将所述重采样全景矩形图像通过坐标变换的方法转换为圆环形图像。
[0063]
进一步的,所述图像转换模块包括:
[0064]
第一计算单元,用于计算所述重采样全景矩形图像对应的圆环形区域的圆环环宽r
ring
的像素数r
ring
和圆环形区域的外圆半径r
out
的像素数p
out
;
[0065][0066][0067]
中心点设定单元,用于设定所述圆环形图像的中心点坐标(center
x
,centery),其中:
[0068]
center
x
≥p
out
,centery≥p
out
[0069]
坐标变换单元,用于将所述重采样全景矩形图像的坐标点(row,col)进行逐像素坐标变换,得到所述圆环形图像对应的坐标点(new
x
,newy);
[0070]
new
x
=center
x
+c*sinθ-0.5
[0071]
newy=center
y-c*cosθ-0.5
[0072]
其中,c=p
out-col,col=1,2,
…
,scaleimg
col
;
[0073]
θ=(row+1)
×
2π/scaleimg
row
,row=1,2,
…
,scaleimg
row
;
[0074]
scaleimg
row
和scaleimg
col
分别为所述重采样全景矩形图像的行数和列数;
[0075]
赋值单元,用于将所述重采样全景矩形图像的坐标点(row,col)的像素值赋值到所述圆环形图像对应的坐标点(new
x
,newy),得到所述圆环形图像。
[0076]
进一步的,所述重采样模块用于:
[0077]
将所述全景矩形图像的行保持不变,按照每一列的重采样比例系数逐列进行重采样,并依次追加在前一列后面,直至所有列重采样完毕为止,得到所述重采样全景矩形图像。
[0078]
进一步的,所述全景矩形图像获取模块用于:
[0079]
获取高塔相机360度拍摄的图像,并去除无效区域,得到所述全景矩形图像;其中,所述无效区域包括开始拍摄和结束拍摄时的重复拍摄区域以及天际线周边及以外区域。
[0080]
进一步的,所述装置还包括:
[0081]
地理配准模块,用于将所述圆环形图像与遥感影像进行地理配准,得到空间位置准确的高塔相机图像。
[0082]
进一步的,所述地理配准模块包括:
[0083]
中心点匹配单元,用于以所述遥感影像为基准,将所述圆环形图像的圆心的经纬度坐标设定为所述高塔相机中心点在地面的投影点的经纬度坐标;
[0084]
几何校正控制点对设置单元,用于在所述圆环形图像和所述遥感影像上均匀选取特征明显的同名地物点,作为几何校正控制点对;
[0085]
几何校正单元,用于通过几何校正,进行圆环形图像投影变换和地理配准,使得所述圆环形图像和所述遥感影像的几何校正控制点对对准,得到空间位置准确的高塔相机图像。
[0086]
本发明具有以下有益效果:
[0087]
本发明首先获取高塔相机360度拍摄得到的全景矩形图像,然后计算全景矩形图像每一列像素的重采样比例系数,并将全景矩形图像的每一列分别按照该列的重采样比例系数进行重采样,然后将重采样全景矩形图像通过坐标变换的方法转换为圆环形图像。本
发明在将全景矩形图像变换为圆环形真实图像照片的过程中,通过重新计算全景矩形图像每一列像素的重采样比例系数并进行重采样,解决了高塔相机成像尺度随视野距离增长呈非线性变化的问题,提高了高塔相机图像几何校正的准确性,高塔相机成像数据在人类活动监控、植被生长监测、大型动物跟踪监测等方面的应用研究奠定了基础。
附图说明
[0088]
图1为本发明的高塔相机图像几何校正方法的流程图;
[0089]
图2为全景矩形图像的示例图;
[0090]
图3为图2所示的全景矩形图像几何校正得到的圆环形图像的示例图;
[0091]
图4为高塔相机成像的简示图;
[0092]
图5为本发明的高塔相机图像几何校正装置的示意图。
具体实施方式
[0093]
为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
[0094]
实施例1:
[0095]
本发明实施例提供一种高塔相机图像几何校正方法,如图1所示,该方法包括:
[0096]
s1:获取高塔相机360度拍摄得到的全景矩形图像;其中,该全景矩形图像的行表示高塔相机360度拍摄的圆环形区域的径向,全景矩形图像的列表示高塔相机360度拍摄的圆环形区域的周向。
[0097]
本步骤用于获取待研究区域的全景矩形图像,全景矩形图像的获取方式不受限制,其中的一个实现方式为:
[0098]
高塔相机360度拍摄图像后,根据待研究区域裁切掉无效区域,得到待研究区域标准化的全景矩形图像,记为oriimg,全景矩形图像的一个示例如图2所示。所述的无效区域包括相机开始拍摄和结束拍摄时的重复拍摄区域、天际线周边及以外区域、其他无效区域等。高塔相机360度拍摄的全景矩形图像对应的圆环形区域如图3所示。
[0099]
本发明可以适用于装载在高塔上的各种相机的图像,例如全色相机、多光谱相机、高光谱相机、热红外相机及其他光学相机的图像。
[0100]
s2:计算圆环形区域的外圆观测角内圆观测角外圆半径r
out
、内圆半径r
in
和圆环环宽r
ring
。
[0101]
假设高塔周边的观测区域为平坦地区,相机在高塔上装载,高塔相机的光轴相对于水平面的俯视角度为α,高塔相机的视场角为高塔相机距离地面的垂直高度为h。由于高塔观测区域相对较小,因此可以认为观测成像面为水平平面。
[0102]
由图4可知,外圆观测角内圆观测角外圆半径r
out
、内圆半径r
in
和圆环环宽r
ring
的计算公式如下:
[0103][0104][0105]
[0106][0107]rring
=r
out-r
in
[0108]
s3:计算全景矩形图像每一列像素的重采样比例系数scalei。
[0109]
本步骤中,需要首先获取全景矩形图像的行数oriimg
row
和列数oriimg
col
。全景矩形图像的行数oriimg
row
也即为全景矩形图像对应的圆环形区域的内圆的像素个数,全景矩形图像的列数oriimg
col
也即为全景矩形图像对应的圆环形区域的圆环环宽的像素数。
[0110]
然后计算全景矩形图像相邻列像素的采集观测角度间隔也即为全景矩形图像对应的圆环形区域的相邻圈像素的采集观测角度间隔。
[0111][0112]
再计算全景矩形图像第i列像素的采样尺度pixceli,pixceli也即为全景矩形图像对应的圆环形区域的相邻圈像素的采样尺度。
[0113][0114]
其中,i=1,2,
…
,oriimg
col
。
[0115]
最后计算全景矩形图像每一列像素的重采样比例系数scalei。
[0116][0117]
其中,scalei为全景矩形图像第i列像素的重采样比例系数,scalei也即为全景矩形图像对应的圆环形区域的第i圈像素的重采样比例系数。
[0118]
s4:将全景矩形图像的每一列分别按照该列的重采样比例系数进行重采样,得到重采样全景矩形图像。
[0119]
本步骤的一个具体实现方式为:将全景矩形图像的行保持不变,按照每一列的重采样比例系数逐列进行重采样,并依次追加在前一列后面,直至所有列重采样完毕为止,得到重采样全景矩形图像scaleimg,重采样全景矩形图像scaleimg即为尺度校准后的图像。
[0120]
s5:将重采样全景矩形图像scaleimg通过坐标变换的方法转换为圆环形图像circleimg。
[0121]
图2所示的全景矩形图像经过本发明的高塔相机图像几何校正方法处理后,得到图3所示的圆环形图像。
[0122]
本发明首先获取高塔相机360度拍摄得到的全景矩形图像,然后计算全景矩形图像每一列像素的重采样比例系数,并将全景矩形图像的每一列分别按照该列的重采样比例系数进行重采样,然后将重采样全景矩形图像通过坐标变换的方法转换为圆环形图像。本发明在将全景矩形图像变换为圆环形真实图像照片的过程中,通过重新计算全景矩形图像每一列像素的重采样比例系数并进行重采样,解决了高塔相机成像尺度随视野距离增长呈非线性变化的问题,提高了高塔相机图像几何校正的准确性,高塔相机成像数据在人类活动监控、植被生长监测、大型动物跟踪监测等方面的应用研究奠定了基础。
[0123]
作为本发明实施例的一种改进,前述的s5包括:
[0124]
s51:计算所述重采样全景矩形图像对应的圆环形区域的圆环环宽r
ring
的像素数r
ring
和圆环形区域的外圆半径r
out
的像素数p
out
。
[0125][0126][0127]
s52:设定圆环形图像的中心点坐标(center
x
,centery),其中:
[0128]
center
x
≥p
out
,centery≥p
out
[0129]
s53:以中心点坐标(center
x
,centery)为中心,将重采样全景矩形图像的坐标点(row,col)进行逐像素坐标变换,得到圆环形图像对应的坐标点(new
x
,newy);
[0130]
new
x
=center
x
+c*sinθ-0.5
[0131]
newy=center
y-c*cosθ-0.5
[0132]
其中,c=p
out-col,col=1,2,
…
,scaleimg
col
;
[0133]
θ=(row+1)
×
2π/scaleimg
row
,row=1,2,
…
,scaleimg
row
;
[0134]
scaleimg
row
和scaleimg
col
分别为重采样全景矩形图像的行数和列数;
[0135]
s54:将重采样全景矩形图像的坐标点(row,col)的像素值赋值到圆环形图像对应的坐标点(new
x
,newy),得到圆环形图像circleimg。
[0136]
本步骤中,利用重采样全景矩形图像的坐标点(row,col)的像素值scaleimg(row,col),按照(row,col)与(new
x
,newy)的坐标对应关系,对圆环形图像的像素点按照如下公式进行逐像素赋值,得到尺度校准后的圆环形图像。
[0137]
circleimg(new
x
,newy)=scaleimg(row,col)
[0138]
本发明以圆环环宽内圆像素空间分辨率(即重采样全景矩形图像最内侧一列像素空间分辨率)为基准,通过极坐标与直角坐标转换,解决了由于高塔相机旋转拍摄引起的图像几何畸变问题,同时最大限度的保留了原始图像的采集信息。
[0139]
作为本发明实施例的另一种改进,本发明的方法还包括:
[0140]
s6:将圆环形图像与遥感影像进行地理配准,得到空间位置准确的高塔相机图像。
[0141]
本步骤用于与高分辨率基准遥感影像进行地理配准,得到空间位置准确的几何校正后的高塔相机图像,其中的一个实现方式包括:
[0142]
s61:以遥感影像为基准,将圆环形图像circleimg的圆心的经纬度坐标设定为高塔相机中心点在地面的投影点的经纬度坐标。
[0143]
s62:在圆环形图像和遥感影像上均匀选取特征明显的同名地物点,作为几何校正控制点对。
[0144]
高塔相机拍摄的全景矩形图像以及得到的圆环形图像上每个像素点对应着地面上的不同地物,有具体的地理位置;遥感影像上每个像元也对应着不同地物,有具体的地理位置;因此在圆环形图像和遥感影像上可以选取同名地物作为几何校正的控制点对。
[0145]
s63:通过几何校正,进行圆环形图像投影变换和地理配准,使得圆环形图像和遥感影像的几何校正控制点对对准,得到空间位置准确的几何校正后的高塔相机图像。
[0146]
下面以一个具体的试验示例对本发明进行详细阐述:
[0147]
1、高塔相机360度拍摄的行数为22560行,列数为960列,去除无效区域后,得到有效行数为22380行,有效列数为960列的全景矩形图像,如图2所示。
[0148]
2、装载在高塔上的高塔相机距离地面的垂直高度为65米,高塔相机镜头轴向相对于水平面的俯视角度α为23
°
,高塔相机镜头的视场角为21.6
°
。计算得到圆环形区域的外圆观测角为77.8
°
,内圆观测角为56.2
°
,外圆半径r
out
为300.64米,内圆半径r
in
为97.10米,圆环环宽r
ring
为203.54米。
[0149]
3、计算全景矩形图像相邻列像素的采集观测角度间隔为0.0225
°
,并计算全景矩形图像每一列像素的重采样比例系数scalei。
[0150]
4、计算重采样后的圆环形区域的圆环环宽r
ring
的像素数r
ring
为2467,圆环形区域的外圆半径r
out
的像素数p
out
为3644。
[0151]
5、将全景矩形图像按照每一列像素的重采样比例系数重采样,获得重采样全景矩形图像。
[0152]
6、将重采样全景矩形图像通过坐标转换,转换为圆环形图像。
[0153]
7、以正射校正后的高分辨率卫星遥感影像为基准,对研究区域尺度校准后的圆环形图像进行地理配准和投影变换,获得几何校正后的高塔相机图像,如图3所示。
[0154]
实施例2:
[0155]
本发明实施例提供一种高塔相机图像几何校正装置,如图5所示,该装置包括:
[0156]
全景矩形图像获取模块1,用于获取高塔相机360度拍摄得到的全景矩形图像;其中,全景矩形图像的行表示高塔相机360度拍摄的圆环形区域的径向,全景矩形图像的列表示高塔相机360度拍摄的圆环形区域的周向。
[0157]
第一计算模块2,用于计算圆环形区域的外圆观测角内圆观测角外圆半径r
out
、内圆半径r
in
和圆环环宽r
ring
。
[0158][0159][0160][0161][0162]rring
=r
out-r
in
[0163]
其中,α为高塔相机的光轴相对于水平面的俯视角度,为高塔相机的视场角,h为高塔相机距离地面的垂直高度。
[0164]
第二计算模块3,用于计算全景矩形图像每一列像素的重采样比例系数scalei。
[0165][0166]
其中,scalei为全景矩形图像第i列像素的重采样比例系数,i=1,2,
…
,oriimg
col
,oriimg
col
为全景矩形图像的列数,pixceli为全景矩形图像第i列像素的采样尺度。
[0167][0168]
为全景矩形图像相邻列像素的采集观测角度间隔。
[0169][0170]
重采样模块4,用于将全景矩形图像的每一列分别按照该列的重采样比例系数进
行重采样,得到重采样全景矩形图像。
[0171]
图像转换模块5,用于将重采样全景矩形图像通过坐标变换的方法转换为圆环形图像。
[0172]
本发明首先获取高塔相机360度拍摄得到的全景矩形图像,然后计算全景矩形图像每一列像素的重采样比例系数,并将全景矩形图像的每一列分别按照该列的重采样比例系数进行重采样,然后将重采样全景矩形图像通过坐标变换的方法转换为圆环形图像。本发明在将全景矩形图像变换为圆环形真实图像照片的过程中,通过重新计算全景矩形图像每一列像素的重采样比例系数并进行重采样,解决了高塔相机成像尺度随视野距离增长呈非线性变化的问题,提高了高塔相机图像几何校正的准确性,高塔相机成像数据在人类活动监控、植被生长监测、大型动物跟踪监测等方面的应用研究奠定了基础。
[0173]
作为本发明实施例的一种改进,前述的图像转换模块包括:
[0174]
第一计算单元,用于计算重采样全景矩形图像对应的圆环形区域的圆环环宽r
ring
的像素数p
ring
和圆环形区域的外圆半径r
out
的像素数p
out
。
[0175][0176][0177]
中心点设定单元,用于设定圆环形图像的中心点坐标(center
x
,centery),其中:
[0178]
center
x
≥p
out
,centery≥p
out
[0179]
坐标变换单元,用于将重采样全景矩形图像的坐标点(row,col)进行逐像素坐标变换,得到圆环形图像对应的坐标点(new
x
,newy)。
[0180]
new
x
=center
x
+c*sinθ-0.5
[0181]
newy=center
y-c*cosθ-0.5
[0182]
其中,c=p
out-col,col=1,2,
…
,scaleimg
col
。
[0183]
θ=(row+1)
×
2π/scaleimg
row
,row=1,2,
…
,scaleimg
row
。
[0184]
scaleimg
row
和scaleimg
col
分别为重采样全景矩形图像的行数和列数。
[0185]
赋值单元,用于将重采样全景矩形图像的坐标点(row,col)的像素值赋值到圆环形图像对应的坐标点(new
x
,newy),得到圆环形图像。
[0186]
前述的重采样模块进一步用于:
[0187]
将全景矩形图像的行保持不变,按照每一列的重采样比例系数逐列进行重采样,并依次追加在前一列后面,直至所有列重采样完毕为止,得到重采样全景矩形图像。
[0188]
进一步的,前述的全景矩形图像获取模块进一步用于:
[0189]
获取高塔相机360度拍摄的图像,并去除无效区域,得到全景矩形图像;其中,无效区域包括开始拍摄和结束拍摄时的重复拍摄区域以及天际线周边及以外区域。
[0190]
作为本发明实施例的一种改进,本发明的装置还包括:
[0191]
地理配准模块,用于将圆环形图像与遥感影像进行地理配准,得到空间位置准确的高塔相机图像。
[0192]
具体的,地理配准模块包括:
[0193]
中心点匹配单元,用于以遥感影像为基准,将圆环形图像的圆心的经纬度坐标设定为高塔相机中心点在地面的投影点的经纬度坐标。
[0194]
几何校正控制点对设置单元,用于在圆环形图像和遥感影像上均匀选取特征明显的同名地物点,作为几何校正控制点对。
[0195]
几何校正单元,用于通过几何校正,进行圆环形图像投影变换和地理配准,使得圆环形图像和遥感影像的几何校正控制点对对准,得到空间位置准确的高塔相机图像。
[0196]
本发明实施例所提供的装置,其实现原理及产生的技术效果和前述方法实施例相同,为简要描述,装置实施例部分未提及之处,可参考前述方法实施例1中相应内容。所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,前述描述的装置和单元的具体工作过程,均可以参考上述方法实施例中的对应过程,在此不再赘述。
[0197]
最后应说明的是:以上所述实施例,仅为本发明的具体实施方式,用以说明本发明的技术方案,而非对其限制,本发明的保护范围并不局限于此,尽管参照前述实施例对本发明进行了详细的说明。本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围。都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1