眼球突出度测量方法以及系统
1.本发明涉及眼球突出度测量领域,特别是涉及一种眼球突出度测量方法以及系统。
背景技术:
2.眼球突出度是指眼球在骨性眼眶内的相对位置,是由眼眶容积和骨性眼眶形态之间的关系决定的,并受到眶隔松紧和眼眶内血管压力的影响。多种眼眶疾病如眼眶急慢性炎症、肿瘤以及颈动脉海绵窦瘘等均可引起眼球突出,其中以甲状腺相关性眼病(tao)最为常见;而眼眶骨折、眼眶静脉曲张或眶脂肪萎缩等可导致眼球凹陷。眼球突出度测量是诊断眼眶疾病并评价治疗效果必不可少的基础性临床检查之一。当发现患者有眼球突出这一症状时,应怀疑患者眼眶内发生病变,如前述tao等炎性改变或眶内占位性病变等,都对疾病的早期筛查非常重要。
3.眼球突出度是指从颞侧面眶边缘至角膜顶点的垂直距离,临床上最常使用的是普通尺测量法和hertel眼球突出计测量法。普通尺测量法是指将透明或特质的尺子的零刻度线放在颞侧面眶边缘,由测量者从侧面观察,角膜顶点处显示的距离,这种方法较为简便但精度较差,往往与医生的经验也存在较大关系。由于由眼球突出度的测量是由人眼观测获取的,对眼球最高顶点的判断难以精确定位。同时,尺子的角度与摆放会产生较大影响。hertel氏眼球突出计是通过等腰直角三角形的光学玻璃棱镜,将角膜顶点和刻度标尺同时通过斜面的反射投影至棱镜前面,能通过人眼在正前方进行观测来获许数值。但是由于人眼眶部位的软组织存在一定厚度,不能保证其在人工卡位时的标准性,位置会有所偏移,而这种偏移会进一步放大测量的误差。此外,这种方法相对也是通过人眼观测,具有和普通尺测量法相似的关于角膜顶点确定的问题,因此带来较大的误差。
4.目前,根据归纳主要存在眼球突出度计法、传统计算机断层扫描(ct)测量法、三维(3d)ct测量法及其他眼球突出度测量法这四大类。其中眼球突出计有hertel,naugle,oculus,mourits四种。有部分研究证明这些版本可能相比hertel眼球突出计具有更高的准确度,但未被广泛验证并使用,也无法彻底解决固有的手动测量带来的不可重复性问题。传统计算机断层扫描(ct)测量法主要分为直接测量和间接测量两种方法。直接测量即在ct扫描的基础上实现重建冠状面、矢状面和斜轴平面,并在这些平面上选择几点间的距离来代表眼球突出度。间接测量则通过计算面积比表示眼球突出度,通过复杂的几何计算以量化tao患者的轴向眼球突出程度。d-ct重建法则通过ct数据进行三维重建来进行测量,还有其他丰富的尝试,例如借助光学三维成像、正面及侧面的数字化摄影照片、裂隙灯测量,借助海伦公式、简单的勾股定理进行计算等。
5.以上各类眼球突出度的测量方法都有各自的优势和局限性。眼球突出度计操作简单但测量误差较大且测量者间存在个体差异;ct测量较眼球突出度计较为准确但花费高,患者需要受辐射损伤,难以成为需要在病程中多次反复测量的标准方式;眼球突出计和ct检测方法大多以两侧眶外缘的连线或同侧眶内外缘的连线作为参考线通过测量角膜顶点
到该参考线的距离评价眼球突出的程度,当受检者头歪、眼球偏斜时双眼不在ct扫描的同一个层面,导致检测结果偏差较大,且检测方法复杂;利用三维重建技术的测量准确度高,在一些特殊情况下如头位不正、斜视等也可使用,但测量方法较复杂且耗时长。
6.在人工智能技术高速发展的今天,更启发我们要借助于新兴的技术探索出操作简便、测量精确度高且适用范围广的眼球突出度测量方法。目前,有关人工智能技术领域的应用仅停留在对ct/mri等这类低噪声,相对较容易分析的图像,而没有选择直接分析人的面部。其他一些专利也仅将其创新的视角着眼于对hertel装置的改良。
技术实现要素:
7.鉴于以上所述现有技术的缺点,本发明的目的在于提供一种眼球突出度测量方法以及系统,用于解决用于解决现有技术中以上技术问题。
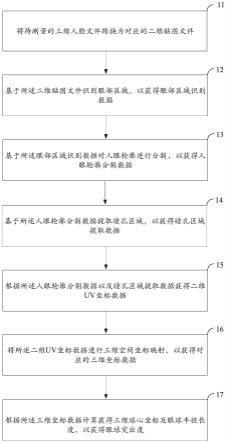
8.为实现上述目的及其他相关目的,本发明提供一种眼球突出度测量方法,所述方法包括:将待测量的三维人脸文件转换为对应的二维贴图文件;基于所述二维贴图文件识别眼部区域,以获得眼部区域识别数据;基于所述眼部区域识别数据对人眼轮廓进行分割,以获得人眼轮廓分割数据;基于所述人眼轮廓分割数据提取瞳孔区域,以获得瞳孔区域提取数据;根据所述人眼轮廓分割数据以及瞳孔区域提取数据获得二维uv坐标数据;其中,所述二维uv坐标数据包括:颞侧眶边缘二维坐标数据以及瞳孔边缘二维坐标数据;将所述二维uv坐标数据进行三维空间坐标映射,以获得对应的三维坐标数据;根据所述三维坐标数据计算获得三维球心坐标及眼球半径长度,以获得眼球突出度。
9.于本发明的一实施例中,所述基于所述二维贴图文件识别眼部区域,以获得眼部区域识别数据包括:基于yolo网络,识别所述二维贴图文件中的眼部矩形区域,以获得眼部区域识别数据。
10.于本发明的一实施例中,所述基于所述眼部区域识别数据对人眼轮廓进行分割,以获得人眼轮廓分割数据包括:利用sobel算子对所述眼部区域识别数据进行人眼轮廓分割,以获得人眼轮廓分割数据。
11.于本发明的一实施例中,所述基于所述人眼轮廓分割数据提取瞳孔区域,以获得瞳孔区域提取数据包括:利用霍夫变换对所述人眼轮廓分割数据进行瞳孔区域检测,以获得瞳孔区域提取数据。
12.于本发明的一实施例中,所述根据所述人眼轮廓分割数据以及瞳孔区域提取数据获得二维uv坐标数据包括:基于设定的边缘阈值遍历所述人眼轮廓分割数据,获得颞侧眶边缘二维坐标数据;根据所述瞳孔区域提取数据中的圆心坐标数据和半径坐标数据,获得瞳孔边缘二维坐标数据。
13.于本发明的一实施例中,所述将所述二维uv坐标数据进行三维空间坐标映射,以获得对应的三维坐标数据包括:基于三维模型文件,将所述颞侧眶边缘二维坐标数据与瞳孔边缘二维坐标数据分别进行三维空间坐标映射,获得对应的颞侧眶边缘三维坐标数据以及瞳孔边缘三维坐标数据;其中,所述三维模型文件包括:多个顶点分别对应的顶点三维坐标数据、顶点纹理坐标数据以及顶点法线数据。
14.于本发明的一实施例中,所述基于三维模型文件,将所述颞侧眶边缘二维坐标数据与瞳孔边缘二维坐标数据分别进行三维空间坐标映射,获得对应的颞侧眶边缘三维坐标
数据以及瞳孔边缘三维坐标数据包括:基于所述三维模型文件中各顶点的顶点纹理坐标数据以及所述颞侧眶边缘二维坐标数据计算各顶点与颞侧眶边缘的欧式距离,以确定颞侧眶边缘三维坐标数据;通过瞳孔边缘二维坐标数据确定一或多个圆周离散点,并根据所述三维模型文件获得瞳孔边缘三维坐标数据。
15.于本发明的一实施例中,所述通过瞳孔边缘二维坐标数据确定一或多个圆周离散点,并根据所述三维模型文件获得瞳孔边缘三维坐标数据包括:根据所述瞳孔边缘二维坐标数据的瞳孔中心二维坐标以及瞳孔左右顶点二维坐标得到瞳孔轮廓的圆形解析表达式,并在该圆形解析表达式所对应的圆周上取一或多个离散点,并根据所述三维模型文件获得各离散点的三维坐标数据;根据所述瞳孔边缘二维坐标数据的瞳孔中心二维坐标以及瞳孔内部靠近瞳孔左右顶点二维坐标得到瞳孔内部轮廓的圆形解析表达式,并在该圆形解析表达式所对应的圆周上取一或多个离散点,并根据所述三维模型文件获得各离散点的三维坐标数据。
16.于本发明的一实施例中,所述根据所述三维坐标数据计算获得三维球心坐标及眼球半径长度,以获得眼球突出度包括:基于矩阵化的三维球坐标方程,根据所述三维坐标数据通过最小二乘法拟合获得球心坐标及眼球半径长度;根据所述球心坐标以及颞侧眶边缘三维坐标数据计算球心与颞侧眶边缘的垂直距离;根据所述眼球半径长度以及所述垂直距离获得眼球突出度。
17.为实现上述目的及其他相关目的,本发明提供一种眼球突出度测量系统,所述系统包括:二维文件转换模块,用于将待测量的三维人脸文件转换为对应的二维贴图文件;眼部区域识别模块,连接所述二维文件转换模块,用于基于所述二维贴图文件识别眼部区域,以获得眼部区域识别数据;人眼轮廓分割模块,连接所述眼部区域识别模块,用于基于所述眼部区域识别数据对人眼轮廓进行分割,以获得人眼轮廓分割数据;瞳孔区域提取模块,连接所述人眼轮廓分割模块,用于基于所述人眼轮廓分割数据提取瞳孔区域,以获得瞳孔区域提取数据;二维坐标获取模块,连接所述人眼轮廓分割模块以及瞳孔区域提取模块,用于根据所述人眼轮廓分割数据以及瞳孔区域提取数据获得二维uv坐标数据;其中,所述二维uv坐标数据包括:颞侧眶边缘二维坐标数据以及瞳孔边缘二维坐标数据;三维坐标获取模块,连接所述二维坐标获取模块,用于将所述二维uv坐标数据进行三维空间坐标映射,以获得对应的三维坐标数据;眼球突出度计算模块,连接所述三维坐标获取模块,用于根据所述三维坐标数据计算获得三维球心坐标及眼球半径长度,以获得眼球突出度。
18.如上所述,本发明是一种眼球突出度测量方法以及系统,具有以下有益效果:本发明通过先将三维人脸文件转化为二维贴图,简化计算机视觉处理的复杂度。再对眼部区域进行提取,除去图片的冗余部分,提高精度。再进行眼睛轮廓的提取,在检测出眼眶后检测瞳孔,提取出了颞侧眶边缘和瞳孔边缘在二维贴图上的坐标。再映射回三维照片,将三维球坐标方程矩阵化并使用最小二乘法拟合出球心坐标及眼球半径长度,即可计算出眼球突出距离。本技术采用便利、无接触式的三维人脸图像作为输入,通过借助人工智能、计算机视觉与基于三维坐标的数学计算,实现了突眼度的自动化、精准化测量。
附图说明
19.图1显示为本发明一实施例中的眼球突出度测量方法的流程示意图。
20.图2显示为本发明一实施例中的yolo网络的结构示意图。
21.图3显示为本发明一实施例中的眼球突出度测量方法的流程示意图。
22.图4显示为本发明一实施例中的眼球突出度测量系统的结构示意图。
具体实施方式
23.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
24.需要说明的是,在下述描述中,参考附图,附图描述了本发明的若干实施例。应当理解,还可使用其他实施例,并且可以在不背离本发明的精神和范围的情况下进行机械组成、结构、电气以及操作上的改变。下面的详细描述不应该被认为是限制性的,并且本发明的实施例的范围仅由公布的专利的权利要求书所限定。这里使用的术语仅是为了描述特定实施例,而并非旨在限制本发明。空间相关的术语,例如“上”、“下”、“左”、“右”、“下面”、“下方”、
““
下部”、“上方”、“上部”等,可在文中使用以便于说明图中所示的一个元件或特征与另一元件或特征的关系。
25.在通篇说明书中,当说某部分与另一部分“连接”时,这不仅包括“直接连接”的情形,也包括在其中间把其它元件置于其间而“间接连接”的情形。另外,当说某种部分“包括”某种构成要素时,只要没有特别相反的记载,则并非将其它构成要素,排除在外,而是意味着可以还包括其它构成要素。
26.其中提到的第一、第二及第三等术语是为了说明多样的部分、成分、区域、层及/或段而使用的,但并非限定于此。这些术语只用于把某部分、成分、区域、层或段区别于其它部分、成分、区域、层或段。因此,以下叙述的第一部分、成分、区域、层或段在不超出本发明范围的范围内,可以言及到第二部分、成分、区域、层或段。
27.再者,如同在本文中所使用的,单数形式“一”、“一个”和“该”旨在也包括复数形式,除非上下文中有相反的指示。应当进一步理解,术语“包含”、“包括”表明存在所述的特征、操作、元件、组件、项目、种类、和/或组,但不排除一个或多个其他特征、操作、元件、组件、项目、种类、和/或组的存在、出现或添加。此处使用的术语“或”和“和/或”被解释为包括性的,或意味着任一个或任何组合。因此,“a、b或c”或者“a、b和/或c”意味着“以下任一个:a;b;c;a和b;a和c;b和c;a、b和c”。仅当元件、功能或操作的组合在某些方式下内在地互相排斥时,才会出现该定义的例外。
28.目前的眼球突出度测量方法乃至眼球突出度标准存在较大的差异性,迫切需要一种合理、便捷、稳定一致的方法帮助临床医生更好地研究和测量眼球突出度,并得到适合于中国人不同年龄段的眼球突出度的标准参考值,以更好地帮助在临床上判断或预测相关疾病。
29.因此,本发明提供一种眼球突出度测量方法以及系统,先将三维人脸文件转化为二维贴图,简化计算机视觉处理的复杂度。再对眼部区域进行提取,除去图片的冗余部分,提高精度。再进行眼睛轮廓的提取,在检测出眼眶后检测瞳孔,提取出了颞侧眶边缘和瞳孔
边缘在二维贴图上的坐标。再映射回三维照片,将三维球坐标方程矩阵化并使用最小二乘法拟合出球心坐标及眼球半径长度,即可计算出眼球突出距离。本技术采用便利、无接触式的三维人脸图像作为输入,通过借助人工智能、计算机视觉与基于三维坐标的数学计算,实现了突眼度的自动化、精准化测量。
30.下面以附图为参考,针对本发明的实施例进行详细说明,以便本发明所述技术领域的技术人员能够容易地实施。本发明可以以多种不同形态体现,并不限于此处说明的实施例。
31.如图1展示本发明实施例中的一种眼球突出度测量方法的流程示意图。
32.所述方法包括:
33.步骤s11:将待测量的三维人脸文件转换为对应的二维贴图文件。
34.在测量突眼度的过程中,我们需要使用三维人脸作为输入。然而,目前较为成熟的人脸解析和语义分割算法均基于二维人脸。因此需要将三维人脸文件转换为对应的二维贴图文件。
35.可选的,我们使用uvmap的方式,实现三维人脸和二维贴图文件的映射。其中uv指的是二维贴图文件的坐标的简称。我们只需要对二维贴图文件(jpg格式,如上图所示)进行人眼分割,即可在原三维人脸中找到对应的眼轮廓坐标。
36.步骤s12:基于所述二维贴图文件识别眼部区域,以获得眼部区域识别数据。
37.可选的,由于贴图存在较多冗余部分,直接进行边缘检测会影响准确性。我们先对眼部矩形区域进行目标检测和提取,去除矩形区域以外的部分,再进一步进行眼轮廓的识别。
38.步骤s12包括:基于yolo网络,识别所述二维贴图文件中的眼部矩形区域,以获得眼部区域识别数据。
39.目标检测是计算机视觉中最核心的一个问题,市面上有众多机器学习算法用于此类问题,如r-cnn,retina-net,resnet等,我们采取了较为经典的yolo算法,它不但有着较高的准确率,在实时性上也有较大优势,对于提高实际应用时的速度有较大帮助。
40.优选的,采用的yolo网络基本结构如图2所示,分为特征提取(darknet53 without fc layer)和预测分类两部分。上图中的cbl模块,由卷积层(conv),标准化层(bn)和激活函数层(leaky relu)组成,为一个基本的卷积模块;res unit即残差块,每两次卷积进行一次跳层连接;resx为残差单元,由一个cbl和x个残差块组成。特征提取部分,借鉴了resnet网络的残差跳层连接结构,使用大量的残差块(res unit),避免过拟合现象的出现。同时,为了降低池化带来的梯度负面效果,yolo直接使用卷积的stride进行下采样。预测分类借鉴fpn网络的upsample和融合算法,在三个scale的feature map上检测,加强了对小目标检测的精确度,这也符合对人眼这样的小目标进行检测的需求。
41.步骤s13:基于所述眼部区域识别数据对人眼轮廓进行分割,以获得人眼轮廓分割数据。
42.可选的,在对眼部矩形区域识别后,我们需要对人眼的轮廓进行分割。由于图像边缘存在信息的突变,如颜色突变、纹理突变等,传统视觉领域对边缘识别往往采取求导的方式。考虑到眼眶轮廓较为明显,内外色差较大,直接采用传统视觉方法便可获得较好的效果。而传统的边缘检测大多数是基于梯度方向导数求卷积的方法,常用的算子包括sobel算
子,canny算子等等。
43.优选的,步骤s13包括:利用sobel算子对所述眼部区域识别数据进行人眼轮廓分割,以获得人眼轮廓分割数据。具体的,sobel算子,这是一种离散微分算子,结合了高斯平滑和微分求导。sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息。因为sobel算子结合了高斯平滑和微分求导(分化),因此结果会具有更多的抗噪性。由于眼眶附近的睫毛干扰,噪声较强,这个算子的抗噪性对于眼眶识别也有实用意义。
44.相比于canny算子来说,obel算子得出的结果含有更多的纹理细节,而上文参数条件下的canny算子呈现二值化,得到的更偏向整体的轮廓。为了后续进行瞳孔的定位,需要一些纹理细节,所以采用sobel算子进行处理。
45.步骤s14:基于所述人眼轮廓分割数据提取瞳孔区域,以获得瞳孔区域提取数据。
46.可选的,步骤s14包括:利用霍夫变换对所述人眼轮廓分割数据进行瞳孔区域检测,以获得瞳孔区域提取数据。其中,霍夫变换(hough transform)是图像处理中的一种特征提取技术,它通过一种投票算法检测具有特定形状的物体。hough变换是图像处理中从图像中识别几何形状的基本方法之一。hough变换的基本原理在于利用点与线的对偶性,将原始图像空间的给定的曲线通过曲线表达形式变为参数空间的一个点。这样就把原始图像中给定曲线的检测问题转化为寻找参数空间中的峰值问题。也即把检测整体特性转化为检测局部特性。比如直线、椭圆、圆、弧线等。
47.为了检测瞳孔的边界区域,利用以上sobel算子得出的轮廓图片,应用hough变换检测圆,从而得出结果。具体的算法分为两部分,即估计圆心、估计半径。估计圆心的时候,先初始化圆心参数空间n(a,b),遍历所有非零像素点,统计排序n(a,b)得到可能的圆心。估计半径,先选定某一个圆心(a,b),计算所有非零点距离圆心的距离,并且从小到大排序,根据阈值选择合适的可能半径,再通过参数空间的方法,从可能的半径中用统计排序得出最终半径值。
48.步骤s15:根据所述人眼轮廓分割数据以及瞳孔区域提取数据获得二维uv坐标数据。
49.详细来说,二维uv坐标(二维贴图坐标)提取包括颞侧眶边缘坐标提取、瞳孔边缘坐标提取,其中,所述二维uv坐标数据包括:颞侧眶边缘二维坐标数据以及瞳孔边缘二维坐标数据。
50.可选的,步骤s15包括:
51.基于设定的边缘阈值遍历所述人眼轮廓分割数据,获得颞侧眶边缘二维坐标数据;具体的,在sobel算子得到的矩阵(图片的本质是矩阵)基础上,设置一个边缘阈值t,若某一点的值大于该阈值,就说明这个点属于眼睛轮廓上的点。分别从右往左和从左往右遍历矩阵,找出大于阈值的点中,坐标最左边和最右边的点,即为眼睛的颞侧眶边缘。即其对应的坐标为颞侧眶边缘二维坐标数据。
52.根据所述瞳孔区域提取数据中的圆心坐标数据和半径坐标数据,获得瞳孔边缘二维坐标数据。具体的,在hough变换的过程中,已经得到了圆心坐标和半径坐标,直接可以作为瞳孔边缘的坐标二维表示形式,即瞳孔边缘二维坐标数据。
53.步骤s16:将所述二维uv坐标数据进行三维空间坐标映射,以获得对应的三维坐标
数据。
54.可选的,步骤s16包括:基于三维模型文件,将所述颞侧眶边缘二维坐标数据与瞳孔边缘二维坐标数据分别进行三维空间坐标映射,获得对应的颞侧眶边缘三维坐标数据以及瞳孔边缘三维坐标数据;其中,所述三维模型文件包括:多个顶点分别对应的顶点三维坐标数据、顶点纹理坐标数据以及顶点法线数据。
55.其中,三维模型文件为obj文件,其中的各项参数的意义如下:v(vertices):顶点的三维坐标。vt(vertex texture):顶点纹理坐标,是一个二维坐标。有一张二维的纹理图与该obj文件一一对应,由于v只保存了空间位置信息,所以vt则是用来补充保存纹理信息的,而这种对应关系正是本文需要利用的一点。vn(vertex normal):顶点法线,三维的体是由无数的面构成的,而vn是这些面的法线。
56.可选的,所述基于三维模型文件,将所述颞侧眶边缘二维坐标数据与瞳孔边缘二维坐标数据分别进行三维空间坐标映射,获得对应的颞侧眶边缘三维坐标数据以及瞳孔边缘三维坐标数据包括:
57.基于所述三维模型文件中各顶点的顶点纹理坐标数据以及所述颞侧眶边缘二维坐标数据计算各顶点与颞侧眶边缘的欧式距离,以确定颞侧眶边缘三维坐标数据;具体的,对颞侧眶边缘,遍历所述三维模型文件中所有的vt计算其与颞侧眶边缘的欧氏距离,找到欧氏距离最小的点作为最接近的vt坐标,并通过obj文件对应获取相应的v点坐标,即为颞侧眶边缘对应的三维坐标。
58.通过瞳孔边缘二维坐标数据确定一或多个圆周离散点,并根据所述三维模型文件获得瞳孔边缘三维坐标数据。
59.可选的,对于瞳孔,为减小meshlab拟合过程中产生的z方向误差,我们不直接采用二维图像中瞳孔中心点对应的三维坐标,而是进行以下优化步骤:
60.根据所述瞳孔边缘二维坐标数据的瞳孔中心二维坐标以及瞳孔左右顶点二维坐标得到瞳孔轮廓的圆形解析表达式,并在该圆形解析表达式所对应的圆周上取一或多个离散点,并根据所述三维模型文件获得各离散点的三维坐标数据;
61.根据所述瞳孔边缘二维坐标数据的瞳孔中心二维坐标以及瞳孔内部靠近瞳孔左右顶点二维坐标得到瞳孔内部轮廓的圆形解析表达式,并在该圆形解析表达式所对应的圆周上取一或多个离散点,并根据所述三维模型文件获得各离散点的三维坐标数据。
62.步骤s17:根据所述三维坐标数据计算获得三维球心坐标及眼球半径长度,以获得眼球突出度。
63.可选的,步骤s17包括:
64.基于矩阵化的三维球坐标方程,根据所述三维坐标数据通过最小二乘法拟合获得球心坐标及眼球半径长度;
65.根据所述球心坐标以及颞侧眶边缘三维坐标数据计算球心与颞侧眶边缘的垂直距离;
66.根据所述眼球半径长度以及所述垂直距离获得眼球突出度。
67.优选的,首先考虑球在三维空间中的解析表达式
68.(x-a)2+(y-b)2+(z-c)2=r2;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
69.展开得
70.x
2-2ax+a2+y
2-2by+b2+z
2-2cz+c2=r2;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
71.整理得
72.(-2x)*a+(-2y)*b+(-2z)*c+1*(a2+b2+c
2-r2)=-x
2-y
2-z2;
ꢀꢀꢀ
(3)
73.记a
x
=-2x;ay=-2y;az=-2z;ad=1;d=a2+b2+c
2-r2;e=-x
2-y
2-z2;
74.则可将方程化为
75.a
x
a+ayb+azc+add=e;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
76.即矩阵化的三维球坐标方程:
77.通过获取的三维坐标数据,我们可以得到矩阵a=[a
x a
y a
z ad]和向量e;
[0078]
通过最小二乘法可拟合出最优向量即得到球心坐标(a,b,c)将a;b;c代入d中即可求出球半径r,即眼球半径长度;
[0079]
设颞侧眶边缘坐标为(x1,y1,z1)则眼球突出距离为
[0080]
h=|(c+r)-z1|;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0081]
目前,根据中文互联网及相关医学教材给出的平均正常突眼度的参考为:12-14mm,一般超出2mm即表现为异常,且两眼相差不超过2mm,低于12mm称为眼球内陷,高于12mm被称为眼球突出,眼球内陷和突出均被称为眼球位置的异常,是临床上的重要症状。
[0082]
多中心的研究表明,眼球突出度的测量偏差较大,以至于标准的参考值在不同文献或资料来源也有所不同,这更反映出我们需要一种可重复性高同时足够便捷能积累大量数据得出可靠的结果的方法。
[0083]
如:成都地区成年汉族人群hertel眼球突出度,男性左眼(15.3
±
2 2)mm,右眼(15.0
±
2.l)mm女性左眼(14.1
±
2.0)mm,右眼(14.0
±
2.0)mm。济宁市50岁以上正常人进行整群随机抽样,hertel眼球突出度,右眼平均值12.73
±
2.43mm,左眼平均值12.62
±
2.42mm,右眼眼球突出度平均值15.70
±
2.07mm,左眼眼球突出度平均值15.83
±
2.22mm。青岛地区对儿童少年的眼球突出度的测量,从5岁组的男女平均10.47mm随年龄增长逐渐增大至17岁组的13.91mm。根据国际研究表明利用hertel眼球突出计的测量在14-21mm均为正常范围,不同人种的眼球突出度也不同。
[0084]
为了更好的说明上述眼球突出度测量方法,本发明提供以下具体实施例。
[0085]
实施例1:一种眼球突出度测量方法。如图3所示为眼球突出度测量的流程示意图;方式包括:
[0086]
基于人脸的三维图片,我们建立三维与二维照片的映射关系,在二维人脸中找到眼球中心和边缘的坐标,再映射回三维,读取两点的高度差,即为眼球突出度。
[0087]
先使用uv map将三维人脸文件转化为二维贴图,简化计算机视觉处理的复杂度。采用yolo网络实现眼部区域的提取,除去图片的冗余部分,提高精度。为实现眼睛轮廓的提取,我们对比了常见的边缘检测算子canny和sobel在眼眶识别时的效果,最终选择效果更好的sobel算子。在检测出眼眶后,我们采用霍夫变换(hough transform)检测瞳孔,具体是
通过检测圆的方法定位瞳孔边缘。至此,我们提取出了颞侧眶边缘和瞳孔边缘在二维贴图上的坐标。再映射回三维照片,将三维球坐标方程矩阵化并使用最小二乘法拟合出球心坐标及眼球半径长度,即可计算出眼球突出距离。
[0088]
综上所述,目前的眼球突出度测量方法乃至眼球突出度标准存在较大的差异性,迫切需要一种合理、便捷、稳定一致的方法帮助临床医生更好地研究和测量眼球突出度,并得到适合于中国人不同年龄段的眼球突出度的标准参考值,以更好地帮助在临床上判断或预测相关疾病。本实施例采用便利、无接触式的三维人脸图像作为输入,通过借助人工智能、计算机视觉与基于三维坐标的数学计算,实现了突眼度的自动化、精准化测量。与传统方式相比,本专利使得眼球突出度的测量变得准确、客观、安全、便捷、低成本、可重复且患者依从性高。同时,在疾病演变过程中,眼球突出度的变化值对临床观测具有较高的参考价值。人工智能带来的便捷快速的图像识别,能帮助我们精确快速的测量眼球突出度,从而促进眼眶病的筛查,以达到早诊早治的效果。
[0089]
此外,该方法拥有较好的可推广性、数据可存储性和可拓展性。首先,人工智能技术的应用,使得这一诊疗过程能够最大限度地不受客观条件的限制,如时间地点、医疗设备、硬件设施等;其次,相较于手动测量突眼度的过程,由算法直接得出突眼度能够将结果方便地汇总进入数据库,省去了数字化整理、归档的步骤;最后,随着数据的不断完善,该方法会不断地提高精度,如果辅以一些其他的方法,可以不仅仅停留在突眼度测量,而能够进一步辅助眼眶病的精准化诊断。
[0090]
与上述实施例原理相似的是,本发明提供一种眼球突出度测量系统。
[0091]
以下结合附图提供具体实施例:
[0092]
如图4展示本发明实施例中的一种眼球突出度测量系统的结构示意图。
[0093]
所述系统包括:
[0094]
二维文件转换模块41,用于将待测量的三维人脸文件转换为对应的二维贴图文件;
[0095]
眼部区域识别模块42,连接所述二维文件转换模块41,用于基于所述二维贴图文件识别眼部区域,以获得眼部区域识别数据;
[0096]
人眼轮廓分割模块43,连接所述眼部区域识别模块42,用于基于所述眼部区域识别数据对人眼轮廓进行分割,以获得人眼轮廓分割数据;
[0097]
瞳孔区域提取模块44,连接所述人眼轮廓分割模块43,用于基于所述人眼轮廓分割数据提取瞳孔区域,以获得瞳孔区域提取数据;
[0098]
二维坐标获取模块45,连接所述人眼轮廓分割模块43以及瞳孔区域提取模块44,用于根据所述人眼轮廓分割数据以及瞳孔区域提取数据获得二维uv坐标数据;其中,所述二维uv坐标数据包括:颞侧眶边缘二维坐标数据以及瞳孔边缘二维坐标数据;
[0099]
三维坐标获取模块46,连接所述二维坐标获取模块45,用于将所述二维uv坐标数据进行三维空间坐标映射,以获得对应的三维坐标数据;
[0100]
眼球突出度计算模块47,连接所述三维坐标获取模块46,用于根据所述三维坐标数据计算获得三维球心坐标及眼球半径长度,以获得眼球突出度。
[0101]
需说明的是,应理解图4系统实施例中的各个模块的划分仅仅是一种逻辑功能的划分,实际实现时可以全部或部分集成到一个物理实体上,也可以物理上分开。且这些单元
可以全部以软件通过处理元件调用的形式实现;也可以全部以硬件的形式实现;还可以部分单元通过处理元件调用软件的形式实现,部分单元通过硬件的形式实现。
[0102]
由于该眼球突出度测量系统的实现原理已在前述实施例中进行了叙述,因此此处不作重复赘述。
[0103]
可选的,所述基于所述二维贴图文件识别眼部区域,以获得眼部区域识别数据包括:基于yolo网络,识别所述二维贴图文件中的眼部矩形区域,以获得眼部区域识别数据。
[0104]
可选的,所述基于所述眼部区域识别数据对人眼轮廓进行分割,以获得人眼轮廓分割数据包括:利用sobel算子对所述眼部区域识别数据进行人眼轮廓分割,以获得人眼轮廓分割数据。
[0105]
可选的,所述基于所述人眼轮廓分割数据提取瞳孔区域,以获得瞳孔区域提取数据包括:利用霍夫变换对所述人眼轮廓分割数据进行瞳孔区域检测,以获得瞳孔区域提取数据。
[0106]
可选的,所述根据所述人眼轮廓分割数据以及瞳孔区域提取数据获得二维uv坐标数据包括:基于设定的边缘阈值遍历所述人眼轮廓分割数据,获得颞侧眶边缘二维坐标数据;根据所述瞳孔区域提取数据中的圆心坐标数据和半径坐标数据,获得瞳孔边缘二维坐标数据。
[0107]
可选的,所述将所述二维uv坐标数据进行三维空间坐标映射,以获得对应的三维坐标数据包括:基于三维模型文件,将所述颞侧眶边缘二维坐标数据与瞳孔边缘二维坐标数据分别进行三维空间坐标映射,获得对应的颞侧眶边缘三维坐标数据以及瞳孔边缘三维坐标数据;其中,所述三维模型文件包括:多个顶点分别对应的顶点三维坐标数据、顶点纹理坐标数据以及顶点法线数据。
[0108]
可选的,所述基于三维模型文件,将所述颞侧眶边缘二维坐标数据与瞳孔边缘二维坐标数据分别进行三维空间坐标映射,获得对应的颞侧眶边缘三维坐标数据以及瞳孔边缘三维坐标数据包括:基于所述三维模型文件中各顶点的顶点纹理坐标数据以及所述颞侧眶边缘二维坐标数据计算各顶点与颞侧眶边缘的欧式距离,以确定颞侧眶边缘三维坐标数据;通过瞳孔边缘二维坐标数据确定一或多个圆周离散点,并根据所述三维模型文件获得瞳孔边缘三维坐标数据。
[0109]
可选的,所述通过瞳孔边缘二维坐标数据确定一或多个圆周离散点,并根据所述三维模型文件获得瞳孔边缘三维坐标数据包括:根据所述瞳孔边缘二维坐标数据的瞳孔中心二维坐标以及瞳孔左右顶点二维坐标得到瞳孔轮廓的圆形解析表达式,并在该圆形解析表达式所对应的圆周上取一或多个离散点,并根据所述三维模型文件获得各离散点的三维坐标数据;根据所述瞳孔边缘二维坐标数据的瞳孔中心二维坐标以及瞳孔内部靠近瞳孔左右顶点二维坐标得到瞳孔内部轮廓的圆形解析表达式,并在该圆形解析表达式所对应的圆周上取一或多个离散点,并根据所述三维模型文件获得各离散点的三维坐标数据。
[0110]
可选的,所述根据所述三维坐标数据计算获得三维球心坐标及眼球半径长度,以获得眼球突出度包括:基于矩阵化的三维球坐标方程,根据所述三维坐标数据通过最小二乘法拟合获得球心坐标及眼球半径长度;根据所述球心坐标以及颞侧眶边缘三维坐标数据计算球心与颞侧眶边缘的垂直距离;根据所述眼球半径长度以及所述垂直距离获得眼球突出度。
[0111]
综上所述,本发明的眼球突出度测量系统,先将三维人脸文件转化为二维贴图,简化计算机视觉处理的复杂度。再对眼部区域进行提取,除去图片的冗余部分,提高精度。再进行眼睛轮廓的提取,在检测出眼眶后检测瞳孔,提取出了颞侧眶边缘和瞳孔边缘在二维贴图上的坐标。再映射回三维照片,将三维球坐标方程矩阵化并使用最小二乘法拟合出球心坐标及眼球半径长度,即可计算出眼球突出距离。本技术采用便利、无接触式的三维人脸图像作为输入,通过借助人工智能、计算机视觉与基于三维坐标的数学计算,实现了突眼度的自动化、精准化测量。所以,本发明有效克服了现有技术中的种种缺点而具高度产业利用价值。
[0112]
上述实施例仅示例性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,但凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1