一种基于多基线层析极化目标分解的图像分类方法
1.本发明属于全极化层析合成孔径雷达(tomographic syntheticaperture radar,tomosar)领域,尤其涉及一种基于多基线层析极化目标分解的图像分类方法。
背景技术:
2.极化干涉sar层析技术是sar极化与干涉层析技术的结合,使高分辨成像雷达同时具备了目标电磁特征探测与目标空间结构、环境感知的能力,使得极化干涉sar层析技术对目标的检测、识别,特征参数提取等方面有了进一步的探知空间。极化层析目标分解可获取目标的多维特征信息,为雷达目标识别与图像分类的提供了关键信息支撑。目前,结合极化层析目标分解算法的图像分类方法仍比较少,亟待深入挖掘极化层析目标分解获取的多维信息,构建高效的图像分类器,进一步扩展极化干涉层析sar目标信息提取与图像分类的应用。
3.随着机载、星载极化sar系统重复航过的海量数据获取,实现垂直距离向合成孔径技术的硬性条件已经得以具备。对极化干涉sar层析图像中的目标特性进行深入挖掘,从图像数据中提取出符合应用要求的目标信息,是雷达目标识别与图像分类的关键步骤。然而,目前基于极化干涉sar层析的图像分类算法的研究仍较少。
技术实现要素:
4.鉴于此,本发明旨在提供一种基于多基线层析极化目标分解的图像分类方法,扩展极化层析多信息特征对图像分类的应用。
5.为达到上述目的,本发明采用的技术方案如下:
6.一种基于多基线层析极化目标分解的图像分类方法,包括如下步骤:
7.步骤1、对图像进行相干斑滤波等预处理,并筛选平滑区域。
8.步骤2、对极化层析数据进行极化层析分解,将图像像素划分到表面散射、偶次散射和体散射三个大类中。
9.步骤3、对三大类别中进行类内扩充及合并实现初始分类。
10.步骤4、对初始分类进行优化迭代,直到达到预定的迭代次数或类别中心的像素数量变化率低于百分之五。
11.进一步地,所述步骤1包括:
12.(1)对待处理的极化层析sar图像进行相干斑滤波等预处理。
13.(2)基于图像的总功率数据判断平滑区域,将平滑区域划分为表面散射类。
14.进一步地,步骤2包括:
15.(1)对极化层析数据进行单相位中心的目标分解,获取表面散射、偶散射和体散射分量的权重及相应的相位中心高度。
16.(2)利用表面散射、偶散射和体散射分量的相位中心高度估计目标的高度。
17.(3)对于被判定为非平滑区域的像素点,依据其主导散射类型,分别划分为表面散
射、偶次散射和体散射三大类。
18.进一步地,步骤3包括:
19.(1)依据像素点的三种散射成分功率值将每种散射类别中的像元分成至少30个具有相似像元个数的小类。
20.(2)依据初始小类的平均高度差最小原则,将多个小类聚类合并到预先设定的初始分类的类别数。
21.进一步地,步骤4包括:
22.(1)构建基于极化层析的wishart混合分布模型(gwmm)的概率密度函数。
23.(2)依据相似性最大原则,重新划分个样本点的类别。
24.(3)重复第(1)-(2)步,直到达到预定的迭代次数或类别中心的像素数量变化率低于百分之五。
25.有益效果:
26.本文提出了一种基于多基线层析极化分解技术的图像分类方法,该方法在进行极化特征提取的同时增加了目标高度信息,可有效提升图像分类效果,进一步扩展了极化干涉层析sar目标信息提取与图像分类的应用。
附图说明
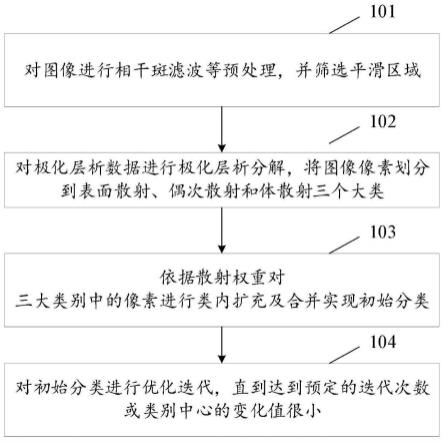
27.图1是本发明的一种基于多基线层析极化目标分解的图像分类方法流程示意图;
28.图2a,图2b是实验数据示意图;其中,图2a为实验数据的光学对照图,图2b为实验数据的合成图;
29.图3是初始分类结果;
30.图4是迭代优化后的分类结果。
具体实施方式
31.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
32.本发明对极化干涉层析数据进行极化目标分解和相位中心高度估计,从而实现图像分类。对图像进行相干斑滤波等预处理,并筛选平滑区域。对极化层析数据进行极化层析分解,将图像像素划分到表面散射、偶次散射和体散射三个大类中。依据散射权重对三大类别进行类内扩充及合并实现初始分类。对初始分类进行优化迭代,直到达到预定的迭代次数或类别中心的变化值很小。
33.如图1所示,本发明的一种基于多基线层析极化目标分解的图像分类方法,具体包括如下步骤:
34.步骤1、对图像进行相干斑滤波等预处理,并筛选平滑区域。具体包括:
35.(1)对待处理的极化层析sar图像进行相干斑滤波等预处理。
36.(2)基于图像的总功率数据判断平滑区域,将平滑区域划分为表面散射类。
37.为了更加准确的分辨表面散射类目标,采用基于图像特征检测的harris特征检
测,求解图像像素灰度梯度计算图像中每一个像素点x和y方向的梯度。计算方法如下:
[0038][0039]
其中,i(x,y)为位于像素位置(x,y)的图像幅度值。
[0040]
构建矩阵,其中,i
x
,iy为每一个像素点x和y方向的梯度。
[0041]
计算参数r来判断平滑均匀的区域:
[0042]
r=detm-k(tracem)2,
[0043]
其中,detm表示对矩阵m求行列式,tracem表示对矩阵m求迹,k为经验值,取值范围0.04~0.06。
[0044]
当r的绝对值很小的时候,即满足下式时,判定该像素为平滑区域。
[0045]
|r|≤threshold
ꢀꢀꢀ
(2)
[0046]
其中,threshold即为判定平滑区域的阈值。
[0047]
步骤2、对极化层析数据进行极化层析分解,将图像像素划分到表面散射、偶次散射和体散射三个大类中。具体包括:
[0048]
(1)对极化层析数据进行单相位中心的目标分解,获取表面散射分量、偶散射分量和体散射分量的权重及相应的相位中心高度。
[0049]
(2)利用表面散射分量、偶散射分量和体散射分量的相位中心高度估计目标的高度。
[0050]
(3)对于被判定为非平滑区域的像素点,依据其主导散射类型,分别划分为表面散射、偶次散射和体散射三大类。
[0051]
步骤3、对表面散射、偶次散射和体散射三大类进行类内扩充及合并实现初始分类。具体包括:
[0052]
(1)依据像素点的三种散射分量功率值将每种散射类别中的像元分成30个(或更多)具有相似像元个数的小类。
[0053]
(2)依据初始小类的平均高度差最小原则,将多个小类聚类合并到预先设定的初始分类的类别。即通过比较初始小类的平均高度,将平均高度差最小的两个小类合并为一个新的小类,重复此过程直至剩余类别数达到预先设定的初始分类类别。
[0054]
步骤4、对初始分类利用wishart分类器进行优化迭代,直到达到预定的迭代次数或类别中心的像素数量变化率低于百分之五。具体包括:
[0055]
(1)构建基于极化层析的wishart混合分布模型(gwmm)的概率密度函数。
[0056][0057]
其中,g表示任意样本点,下标k表示第k类,y
ik
和πi表示第i景图像的第k类的类中心和权重系数,l为多视视数。a
norm
是用于确保上式中概率密度函数积分为1的归一化因子。可以发现,当l为1时,即为普通wishart分布概率密度函数。其中,相似性参数η
β
如下所示:
[0058]
η
β
(t,vm)=exp{-β
·
d(t,vm)}
ꢀꢀꢀ
(4)
[0059]
其中,β是正的超参数,d(t,vm)为距离度量,可采用lee等人提出的wishart距离或任意其他有效距离量,t是待分类像素点的极化相干矩阵,vm是已分类类别的平均极化相干矩阵。这样两个样本之间的距离可以通过核函数映射到0到1之间来表示二者的相似性。
[0060]
(2)依据相似性最大原则,重新划分个样本点的类别。即选用像素与某类的相似性概率为该像素的类别:
[0061]
g∈k|p(g|k)
max
=p(g|k=1,2,...m)
ꢀꢀꢀ
(5)
[0062]
其中,m为类别总数。
[0063]
(3)重复第(1)-(2)步,直到达到预定的迭代次数或类别中心的变化值很小。
[0064]
本发明的实验验证采用的多基线极化干涉sar数据来自欧洲空间局(esa)2009年热带林机载sar遥感实验(tropisar 2009),由6轨重复飞行获取的p-波段全极化sar数据组成。机载数据采用法国国家航空航天研究中心(onera)研制的sethi雷达系统于2009年8月在法属圭亚那巴拉库研究基地获取。该数据已完成定标和配准,截取全景图中右下部分子图像进行极化层析实验,如图2a,图2b所示。该区域包含典型地物如林地(a区域)、平坦陆地(b区域)、建筑目标(c区域)等,如下图所示。需要注意的是,该google earth光学图像的成像时间与sar图像的成像时间不同,sar图像于2009年获得,该google earth图像的主要部分由2012年获得,虽然可以判别出区域c为小型建筑比较集中的区域,但是建筑物的位置和细节并不能较好的对应。
[0065]
对图2a,图2b的极化层析数据按照上述原理进行图像初始分类,偶次散射和体散射各分4类,表面散射分为8类,结果如图3所示。实验结果表明该初始分类方法的结果可以比较清晰的分辨森林区域、平地区域和建筑物区域的位置和细节,特别是林地区域不同高度特征的目标也可以得到有效识别。该分类结果利用散射特征权重分析,不仅可以比较有效的辨识出不同目标的散射机理,而且可以依据目标的高度估计值分辨同一大类目标的高度结构特征,将其细化为不同色调的子类,总体分类效果较好。利用图3所示的极化层析分类初始结果,结合上述相似性分类器对实测极化层析数据进行处理,循环迭代后的数据分类结果如图4所示。实验结果表明,迭代优化后图像中森林目标、建筑物目标及平坦区域的类别更加丰富,且纹理更加清晰,分类结果更加复合光学图像特征。
[0066]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1