一种用于科技教育的AR和硬件编程交互系统的制作方法
一种用于科技教育的ar和硬件编程交互系统
技术领域
1.本发明涉及信息技术领域,更具体地说,本发明涉及一种用于科技教育的ar和硬件编程交互系统。
背景技术:
2.科技教育,通过以学生主动探索为中心的课程活动设计、引入业界广泛应用的软硬件平台、以及参与工程挑战竞赛活动,激发孩子们对科技的兴趣,帮助他们广泛地接触科技知识,掌握常用工程工具的使用方法,训练工程思维,培养其勇于接受工程挑战、主动学习、以及综合运用知识解决问题的能力。
3.增强现实技术是一种将虚拟信息与真实世界巧妙融合的技术,广泛运用了多媒体、三维建模、实时跟踪及注册、智能交互、传感等多种技术手段,将计算机生成的文字、图像、三维模型、音乐、视频等虚拟信息模拟仿真后,应用到真实世界中,两种信息互为补充,从而实现对真实世界的“增强”。
4.硬件设备的操作使用多是采用软件控制,软件通过编程的方式进行设计使用,但是硬件的操作范围受到场地和环境限制较为单一,且编程方式常规且对儿童来说具有一定难度,因此现采用一种用于科技教育的ar和硬件编程交互系统来解决上述问题。
技术实现要素:
5.为了克服现有技术的上述缺陷,本发明提供了一种用于科技教育的ar和硬件编程交互系统,本发明所要解决的技术问题是:硬件设备的操作使用多是采用软件控制,软件通过编程的方式进行设计使用,但是硬件的操作范围受到场地和环境限制较为单一,且编程方式常规且对儿童来说具有一定难度的问题。
6.为实现上述目的,本发明提供如下技术方案:一种用于科技教育的ar和硬件编程交互系统,包括硬件搭建模块,所述硬件搭建模块的输出端与硬件扫描模块的输入端电连接,所述硬件扫描模块的输出端与场景融合单元的输入端电连接,所述场景融合单元的输入端与场景搭建模块的输出端电连接,所述场景搭建模块的输入端与编程模块的输出端连接,所述编程模块的输出端与场景融合单元的输入端连接,所述编程模块的输出端与硬件搭建模块的输入端连接,所述硬件搭建模块的输入端与通信单元的输出端连接,所述硬件扫描模块的输出端与交互单元连接,所述交互单元的输出端与场景融合单元的输入端连接,所述场景融合单元的输出端与ar显示单元的输入端连接,所述ar显示单元的输出端与控制模块的输入端连接,所述控制模块的输出端与通信单元的输入端连接。
7.作为本发明的进一步方案:所述编程模块采用scratch图形化编程,用于构建控制程序,并提供软件编程,同时向用户提供编程的基础知识;
8.所述硬件搭建模块用于根据安装图纸搭建组装硬件小车;
9.所述硬件扫描模块用于对硬件进行扫描并生成硬件对应的虚拟数据。
10.作为本发明的进一步方案:所述控制模块用于将控制程序发出的指令控制小车的
基础操控,基础操控包括小车的前进、后退和转向;
11.所述场景搭建模块用于搭建虚拟小车运行时所在场景的搭建;
12.所述场景融合单元用于硬件小车的虚拟数据与搭建后的场景数据融合;
13.所述ar显示单元用于向用户展示小车虚拟数据所在的场景形象。
14.作为本发明的进一步方案:所述交互单元用于在硬件小车根据指令进行动作后,将硬件小车扫描得到的数据反馈至融合后的场景中,实现硬件小车与虚拟场景中小车的交互。
15.作为本发明的进一步方案:所述硬件扫描模块对硬件采用高频率扫描,扫描得到的图像进行降噪处理后将其发送至场景融合单元;
16.所述降噪处理具体为:
17.设含噪模型:f(k)=s(k)+n(k),k=0,1,2,
…
n-1
18.其中,s(k)作为原始图像信号,n(k)为高斯白噪声;
19.对f(k)作离散小波变换:w
i,k
=ws(j,k)+wn(j,k),j=0,1,2,
…
,j;k=0,1,2,
…
,n
20.其中w
i,k
,ws(j,k)和wn(j,k)分别为含噪图像信号,原始图像信号和噪声在第n层上的小波系数,和分别为最大分解层数j和n图像的总像素数;
21.硬阈值函数表达式为:
[0022][0023]
软阈值函数表达式为:
[0024][0025]
其中为估计小波系数,w
j,k
为分解小波系数,λ为阈值;
[0026]
改进后的阈值函数,
[0027]
α为调节系数,且0≤α≤1,当|w
j,k
|
→
λ时,即改进阈值函数在阈值点处连续;当|w
j,k
|
→
∞时,即随着|w
j,k
|逐渐增大,与w
j,k
之间的偏差越来越小,解决软阈值函数的恒定偏差缺点。
[0028]
影响图像噪声的来源途径众多,例如交流电场、成像设备、设备的影响、电子噪声、信号传输的信道噪声、图像转换的量化噪声等。不同种类的噪声必然都会对图像的质量形成负面影响,通常来看,噪声对图像信号的影响分为3种类别,分别为加性噪声、乘性噪声以及混合噪声,这3种类型的噪声对图像所产生的影响均不一致,在图像信号传递中所形成的噪声大部分都是加性噪声。图像噪声的形式众多,其中包括脉冲噪声、高斯噪声等,在图像处理中出现的噪声一般为脉冲噪声、高斯噪声或两者叠加混合的噪声,其中,脉冲噪声会独立干扰在图像中的某一个像素点,并且会随机出现在图像中的任意区域导致图像中某像素点灰度值出现异常情况,该处的图像值将会明显异于其他像素点,给人视觉上造成一种极
暗或极亮的视觉感受。
[0029]
在数字化图像的获取和传输过程中,传感器和传输信道经常会产生一些脉冲噪声,其极大地降低了图像的质量,电子噪声、光电噪声、感光片颗粒噪声是影响图像质量的3类主要噪声源,可以利用直方图为高斯分布的白噪声作为有效模型。根据图像降噪技术的不同特点,一般将其分为两大类:空间域降噪和变换域降噪,空间域降噪通过各种滤波方法,直接对含噪声图像的像素点直接进行处理,一般情况下,通过空间域降噪方法能在一定程度上消除图像噪声,但是此类方法在消除噪声的同时容易将图像的边缘平滑,造成图像的细节信息丢失,所以该类方法存在着去除噪声和保留边缘细节信息的矛盾,降噪效果难以让人满意,变换域降噪的方法是指先将图像信息进行变换,在变换域中对图像信息进行调整,然后再将调整后的图像信息进行逆变换,最终实现图像去噪。
[0030]
本发明的有益效果在于:
[0031]
1、本发明采用scratch图形化编程,实现对硬件和软件部分的编程,图形化编程入门更加简单,更加直观,能够比较容易的看到自己的编程成果,图形化编程包含了完整的编程思维,简化编程难度的同时保证对编程思维的训练效果,硬件与软件之间采用ar手段进行交互融合,在发送指令控制硬件进行动作反馈后,将硬件的动作数据交互反应至虚拟场景内,便于直观的在虚拟场景判断了解硬件的动作,虚拟与显示的交互,增加趣味性,可根据喜好对相应的运行方案进行编程调整,硬件的组装可较好的锻炼动手能力;
[0032]
2、本发明对硬件扫描过程中得到的图像数据进行降噪处理,避免高频获取图像数据过程中出现的噪声对图像画质的影响,保证画质真实的同时保证图像的细节特征,可较为精确的在虚拟场景中反应硬件的实际数据,实现ar视界中更为充分的感受硬件小车的位置变换和移动。
附图说明
[0033]
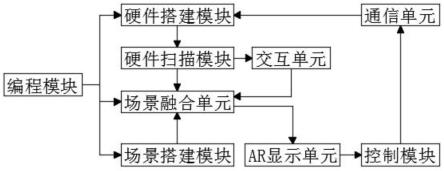
图1为本发明系统连接示意图。
具体实施方式
[0034]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0035]
如图所示,本发明提供了一种用于科技教育的ar和硬件编程交互系统,包括硬件搭建模块,硬件搭建模块的输出端与硬件扫描模块的输入端电连接,硬件扫描模块的输出端与场景融合单元的输入端电连接,场景融合单元的输入端与场景搭建模块的输出端电连接,场景搭建模块的输入端与编程模块的输出端连接,编程模块的输出端与场景融合单元的输入端连接,编程模块的输出端与硬件搭建模块的输入端连接,硬件搭建模块的输入端与通信单元的输出端连接,硬件扫描模块的输出端与交互单元连接,交互单元的输出端与场景融合单元的输入端连接,场景融合单元的输出端与ar显示单元的输入端连接,ar显示单元的输出端与控制模块的输入端连接,控制模块的输出端与通信单元的输入端连接。
[0036]
编程模块采用scratch图形化编程,用于构建控制程序,并提供软件编程,同时向
用户提供编程的基础知识;
[0037]
硬件搭建模块用于根据安装图纸搭建组装硬件小车;
[0038]
硬件扫描模块用于对硬件进行扫描并生成硬件对应的虚拟数据。
[0039]
控制模块用于将控制程序发出的指令控制小车的基础操控,基础操控包括小车的前进、后退和转向;
[0040]
场景搭建模块用于搭建虚拟小车运行时所在场景的搭建;
[0041]
场景融合单元用于硬件小车的虚拟数据与搭建后的场景数据融合;
[0042]
ar显示单元用于向用户展示小车虚拟数据所在的场景形象。
[0043]
交互单元用于在硬件小车根据指令进行动作后,将硬件小车扫描得到的数据反馈至融合后的场景中,实现硬件小车与虚拟场景中小车的交互。
[0044]
硬件扫描模块对硬件采用高频率扫描,扫描得到的图像进行降噪处理后将其发送至场景融合单元;
[0045]
降噪处理具体为:
[0046]
设含噪模型:f(k)=s(k)+n(k),k=0,1,2,
…
n-1
[0047]
其中,s(k)作为原始图像信号,n(k)为高斯白噪声;
[0048]
对f(k)作离散小波变换:w
i,k
=ws(j,k)+wn(j,k),j=0,1,2,
…
,j;k=0,1,2,
…
,n
[0049]
其中w
i,k
,ws(j,k)和wn(j,k)分别为含噪图像信号,原始图像信号和噪声在第n层上的小波系数,和分别为最大分解层数j和n图像的总像素数;
[0050]
硬阈值函数表达式为:
[0051][0052]
软阈值函数表达式为:
[0053][0054]
其中为估计小波系数,w
j,k
为分解小波系数,λ为阈值;
[0055]
改进后的阈值函数,
[0056]
α为调节系数,且0≤α≤1,当|w
j,k
|
→
λ时,即改进阈值函数在阈值点处连续;当|w
j,k
|
→
∞时,即随着|w
j,k
|逐渐增大,与w
j,k
之间的偏差越来越小,解决软阈值函数的恒定偏差缺点。
[0057]
在小波阀值去噪原理的基础上,针对常用阈值函数的缺点,构造了一种改进的阈值函数,并利用matlab软件进行仿真对比,改进的阈值函数进行小波阀值图像去噪具有较好的去噪效果,去噪后的图像在峰值性噪比、均方误差和主观视觉效果方面均优于传统常用阈值函数。
[0058]
影响图像噪声的来源途径众多,例如交流电场、成像设备、设备的影响、电子噪声、
信号传输的信道噪声、图像转换的量化噪声等。不同种类的噪声必然都会对图像的质量形成负面影响,通常来看,噪声对图像信号的影响分为3种类别,分别为加性噪声、乘性噪声以及混合噪声,这3种类型的噪声对图像所产生的影响均不一致,在图像信号传递中所形成的噪声大部分都是加性噪声。图像噪声的形式众多,其中包括脉冲噪声、高斯噪声等,在图像处理中出现的噪声一般为脉冲噪声、高斯噪声或两者叠加混合的噪声,其中,脉冲噪声会独立干扰在图像中的某一个像素点,并且会随机出现在图像中的任意区域导致图像中某像素点灰度值出现异常情况,该处的图像值将会明显异于其他像素点,给人视觉上造成一种极暗或极亮的视觉感受。
[0059]
在数字化图像的获取和传输过程中,传感器和传输信道经常会产生一些脉冲噪声,其极大地降低了图像的质量,电子噪声、光电噪声、感光片颗粒噪声是影响图像质量的3类主要噪声源,可以利用直方图为高斯分布的白噪声作为有效模型。根据图像降噪技术的不同特点,一般将其分为两大类:空间域降噪和变换域降噪,空间域降噪通过各种滤波方法,直接对含噪声图像的像素点直接进行处理,一般情况下,通过空间域降噪方法能在一定程度上消除图像噪声,但是此类方法在消除噪声的同时容易将图像的边缘平滑,造成图像的细节信息丢失,所以该类方法存在着去除噪声和保留边缘细节信息的矛盾,降噪效果难以让人满意,变换域降噪的方法是指先将图像信息进行变换,在变换域中对图像信息进行调整,然后再将调整后的图像信息进行逆变换,最终实现图像去噪。
[0060]
本发明采用scratch图形化编程,实现对硬件和软件部分的编程,图形化编程入门更加简单,更加直观,能够比较容易的看到自己的编程成果,图形化编程包含了完整的编程思维,简化编程难度的同时保证对编程思维的训练效果,硬件与软件之间采用ar手段进行交互融合,在发送指令控制硬件进行动作反馈后,将硬件的动作数据交互反应至虚拟场景内,便于直观的在虚拟场景判断了解硬件的动作,虚拟与显示的交互,增加趣味性,可根据喜好对相应的运行方案进行编程调整,硬件的组装可较好的锻炼动手能力。
[0061]
本发明对硬件扫描过程中得到的图像数据进行降噪处理,避免高频获取图像数据过程中出现的噪声对图像画质的影响,保证画质真实的同时保证图像的细节特征,可较为精确的在虚拟场景中反应硬件的实际数据,实现ar视界中更为充分的感受硬件小车的位置变换和移动。
[0062]
其次:本发明公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本发明同一实施例及不同实施例可以相互组合;
[0063]
最后:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1