一种基于A-Star的运动轨迹生成方法与流程
一种基于a-star的运动轨迹生成方法
技术领域
1.本发明涉及计算机自主导航技术领域,尤其涉及一种基于a-star的运动轨迹生成方法。
背景技术:
2.通过获取人员的运动轨迹可实现对人员的监控。
3.目前,现有技术公开了一种轨迹生成算法,人员需要佩戴雷达等定位系统,通过借助雷达等定位系统获取对应人员的位置信息,并对位置信息进行计算以获得对应的人员的运动轨迹。
4.采用上述方式,在需要监控的人员较多的情况下,雷达等定位系统的硬件开销较大,成本较高。
技术实现要素:
5.本发明的目的在于提供一种基于a-star的运动轨迹生成方法,旨在解决现有的轨迹生成算法的硬件开销较大的问题。
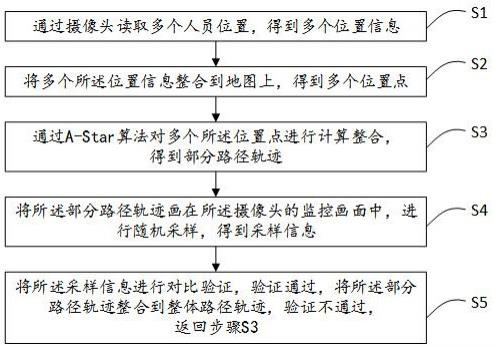
6.为实现上述目的,本发明提供了一种基于a-star的运动轨迹生成方法,包括以下步骤:s1通过摄像头读取多个人员位置,得到多个位置信息;s2将多个所述位置信息整合到地图上,得到多个位置点;s3通过a-star算法对多个所述位置点进行计算整合,得到部分路径轨迹;s4将所述部分路径轨迹画在所述摄像头的监控画面中,进行随机采样,得到采样信息;s5将所述采样信息进行对比验证,验证通过,将所述部分路径轨迹整合到整体路径轨迹,验证不通过,返回步骤s3。
7.其中,在步骤通过摄像头读取多个人员位置,得到多个位置信息之前,所述方法还包括:s101获取监控区域;s102基于所述监控区域确定安装位置和安装数量;s103选取与所述安装数量相等的摄像头,并将所述摄像头安装于对应的所述安装位置上。
8.其中,在步骤选取与所述安装数量相等的摄像头,并将所述摄像头安装于对应的所述安装位置上之后,所述方法还包括:s104对安装的所述摄像头进行防尘处理;s105验证防尘处理后的所述摄像头的清晰度检测,检测通过,执行步骤s1。
9.其中,所述通过a-star算法对多个所述位置点进行计算整合,得到部分路径轨迹的具体方式为:
s31通过a-star算法逐个计算每一所述位置点的优先级,直至遍历所有所述位置点,得到多个最短路径;s32将多个所述最短路径连接,得到部分路径轨迹。
10.其中,所述通过a-star算法逐个计算每一所述位置点的优先级,直至遍历所有所述位置点,得到多个最短路径的具体方式为:s311通过a-star算法计算预设时间内的两个所述位置点之间的估价函数;s312对所述估价函数进行最小值判断,若所述估价函数为最小值,则执行步骤s313,若所述估价函数不为最小值,则返回步骤s311;s313根据所述估价函数连接两个对应的所述位置点,得到最短路径;s314循环步骤s311至s313,直至遍历所有所述位置点,得到多个最短路径。
11.本发明的一种基于a-star的运动轨迹生成方法,通过摄像头读取多个人员位置,得到多个位置信息;将多个所述位置信息整合到地图上,得到多个位置点;通过a-star算法对多个所述位置点进行计算整合,得到部分路径轨迹;将所述部分路径轨迹画在所述摄像头的监控画面中,进行随机采样,得到采样信息;将所述采样信息进行对比验证,验证通过,将所述部分路径轨迹整合到整体路径轨迹,本发明只需采用多个摄像头进行实时视频采集,硬件开销少,并且相比现有的轨迹生成算法,没有借助雷达等定位系统,仅仅通过视觉获取位置信息;且实时显示人员的位置,给客户直观的感受;当获取到一定时间内的位置信息的时候,将会自动生成轨迹信息进行实时反馈,解决了现有的轨迹生成算法的硬件开销较大的问题。
附图说明
12.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
13.图1是本发明提供的一种基于a-star的运动轨迹生成方法的流程图。
14.图2是通过a-star算法对多个所述位置点进行计算整合,得到部分路径轨迹的流程图。
15.图3是通过a-star算法逐个计算每一所述位置点的优先级,直至遍历所有所述位置点,得到多个最短路径的流程图。
16.图4是本发明提供的一种基于a-star的运动轨迹生成方法的步骤图。
具体实施方式
17.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。
18.下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
19.请参阅图1至图4,本发明提供一种基于a-star的运动轨迹生成方法,包括以下步骤:
s1通过摄像头读取多个人员位置,得到多个位置信息;具体的,在步骤通过摄像头读取多个人员位置,得到多个位置信息之前,所述方法还包括:s101获取监控区域;s102基于所述监控区域确定安装位置和安装数量;具体的,使得所述摄像头安装完成后的画面采集范围涵盖整个所述监控区域。
20.s103选取与所述安装数量相等的摄像头,并将所述摄像头安装于对应的所述安装位置上。
21.具体的,所述摄像头采用海康威视监控摄像头。
22.s104对安装的所述摄像头进行防尘处理;具体的,防尘处理后有利于所述摄像头的长期工作,避免灰尘对所述摄像头采集的画面的清晰度造成影响。
23.s105验证防尘处理后的所述摄像头的清晰度检测,检测通过,执行步骤s1。
24.s2将多个所述位置信息整合到地图上,得到多个位置点;s3通过a-star算法对多个所述位置点进行计算整合,得到部分路径轨迹;具体方式为:s31通过a-star算法逐个计算每一所述位置点的优先级,直至遍历所有所述位置点,得到多个最短路径;具体方式为:s311通过a-star算法计算预设时间(相近时间内)内的两个所述位置点之间的估价函数f(n);具体的,a-star算法:a-star算法的核心是通过下面这个函数来计算每个节点的优先级。
25.其中:f(n)是节点n的综合优先级。
26.当我们选择下一个要遍历的节点时,我们总会选取综合优先级最高(值最小)的节点。
27.g(n) 是节点n距离起点的代价。
28.h(n)是节点n距离终点的预计代价,这也就是a-star算法的启发函数。
29.s312对所述估价函数进行最小值判断,若所述估价函数为最小值,则执行步骤s313,若所述估价函数不为最小值,则返回步骤s311;具体的,a-star算法在运算过程中,每次从优先队列中选取f(n)值最小(优先级最高)的节点作为下一个待遍历的节点。
30.s313根据所述估价函数连接两个对应的所述位置点,得到最短路径;具体的,距离的计算:如果图形中只允许朝上下左右四个方向移动,则启发函数可以使用曼哈顿距离。
31.计算曼哈顿距离的函数如下,这里的d是指两个相邻节点之间的移动代价,通常是一个固定的常数。
[0032][0032][0032]32.。
[0033]
s314循环步骤s311至s313,直至遍历所有所述位置点,得到多个最短路径。
[0034]
具体的,a-star算法使用两个集合来表示待遍历的节点,与已经遍历过的节点,这通常称之为open_set和close_set。
[0035]
所以a-star算法的核心是启发函数h(n)在极端情况下,当启发函数h(n)始终为0,则将由g(n)决定节点的优先级,此时算法就退化成了dijkstra算法。
[0036]
如果h(n)始终小于等于节点n到终点的代价,则a-star算法保证一定能够找到最短路径。
[0037]
但是当h(n)的值越小,算法将遍历越多的节点,也就导致算法越慢。
[0038]
如果h(n)完全等于节点n到终点的代价,则a-star算法将找到最佳路径,并且速度很快。
[0039]
可惜的是,并非所有场景下都能做到这一点。
[0040]
因为在没有达到终点之前,我们很难确切算出距离终点还有多远。
[0041]
如果h(n)的值比节点n到终点的代价要大,则a-star算法不能保证找到最短路径,不过此时会很快。
[0042]
s32将多个所述最短路径连接,得到部分路径轨迹(大路径)。
[0043]
s4将所述部分路径轨迹画在所述摄像头的监控画面中,进行随机采样,得到采样信息;s5将所述采样信息进行对比验证,验证通过,将所述部分路径轨迹整合到整体路径轨迹(大轨迹),验证不通过,返回步骤s3。
[0044]
本发明的一种基于a-star的运动轨迹生成方法,通过摄像头读取多个人员位置,得到多个位置信息;将多个所述位置信息整合到地图上,得到多个位置点;通过a-star算法对多个所述位置点进行计算整合,得到部分路径轨迹;将所述部分路径轨迹画在所述摄像头的监控画面中,进行随机采样,得到采样信息;将所述采样信息进行对比验证,验证通过,将所述部分路径轨迹整合到整体路径轨迹,本发明针对通过摄像头所获取到的多个人的位置信息,将信息存储到地图中,提取在地图里的位置信息点位,通过每2个相近点位进行算法的实现,并且添加一些验算及修正,生成路径轨迹;当人出现在不同的摄像头下时,根据多个摄像头对人的位置信息进行整合,在摄像头的盲区及较大远距离的区域进行单独的两个点之间的算法优化,只需采用多个摄像头进行实时视频采集,硬件开销少,并且相比现有的轨迹生成算法,没有借助雷达等定位系统,仅仅通过视觉获取位置信息;且实时显示人员的位置,给客户直观的感受;当获取到一定时间内的位置信息的时候,将会自动生成轨迹信息进行实时反馈,解决了现有的轨迹生成算法的硬件开销较大的问题。
[0045]
以上所揭露的仅为本发明一种基于a-star的运动轨迹生成方法较佳实施例而已,
当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1