一种基于神经网络和双变异遗传算法的电动车防碰撞路径规划方法
1.本发明属于电动车控制领域,涉及一种基于神经网络和双变异遗传算法的电动车防碰撞路径规划方法
背景技术:
2.电动车的性能研究在工程领域具有十分重要的意义,电动车与汽车相比具有灵活性强、安全系数高、经济环保、绿色节能的优点,而电动车防碰撞系统的核心即为自主避障路径规划。电动车旁碰撞路径决策系统中,其主要任务是在具有移动障碍物的环境或电动车行驶路径改变时,电动车需要根据当前环境临时调整局部路线,获取一条从起点到终点的最短路径并保障电动车行驶的过程中的安全性。
3.目前,电动车防碰撞路径规划方法主要有遗传算法、粒子群算法、蚁群算法。但此类方法在实际应用过程中存在如下的问题:(1)如采用传统遗传算法在解决实际应用问题时易出现提前收敛问题与此同时该算法存在收敛速度慢、效率低的缺陷。(2)当电动车前方突然出现移动障碍物时,此时电动车距离障碍物较近,无法保障电动车安全稳定避障,降低了电动车行驶的安全性。
技术实现要素:
4.为了解决现有技术问题,本发明采用神经网络和双变异遗传算法,可在较短的时间内寻找到一条从起点到目标点距离最短且平滑不发生碰撞的路径,完成电动车从起点到目标点的高效安全移动,具体是一种基于神经网络和双变异遗传算法的电动车防碰撞路径规划方法。
5.具体步骤如下:步骤一、电动车行驶的路径进行编码,描述障碍物区域,具体步骤如下:首先,对电动车行驶的路径进行编码,在每一代种群中,每一条染色体的第一个基因位的取值都是电动车当前的位置,最后一个基因位的取值是电动车所经过路径上任意一点的坐标,路径上各点的连线就是算法要规划出的路径。
6.其次,描述障碍物区域,针对电动车的行驶环境构建电动车行驶路径二维空间坐标系,建立多边形表示障碍物区域,该区域用不等式组表示,具体为:其中,和分别表示移动障碍物任意顶点的坐标。
7.步骤二、建立电动车行驶环境信息神经网络模型,对电动车行驶路径进行选择,电动车行驶环境信息神经网络模型,是一个三层网络模型,输入层是电动车行驶路径的任意一点坐标、中间层和输出层是神经元节点的激发函数,具体由以下公式给出:
其中,是电动车行驶路径的任意一点坐标,是中间层和输出层是神经元节点激发函数采用阶跃函数,和是输入层到中间层权值分别是顶层结点的输入、输出和阈值分别是中间层第结点的输入、输出和阈值。
8.首先,中间层到第结点的阈值由以下公式给出:其中是第障碍物的起始坐标为是第障碍物在时刻位置坐标是第障碍物在时刻的运动速度和是第障碍物在坐标中的运动分量。
9.其次,输入层到中间层的权值和顶层结点的阈值由以下方法得出:描述移动障碍物区域的不等式、的系数作为神经网络模型输入层到中间层的权值,不等式的个数减去0.5后的相反数作为顶层结点的阈值。
10.最后,由该模型可知电动车任意行驶路径点的坐标相对于模型输出只有0和1,当时表示电动车经过的路径点坐标在障碍物区域内表示不在障碍物区域内。
11.步骤三、随机生成初始种群,并设置初始交叉概率,变异概率。
12.步骤四、计算初始种群适应度,得到可行解的集合和非可行解集合,具体为:首先,利用环境信息神经网络模型,计算电动车行驶的路径点不在移动障碍物区域内的目标函数,由以下公式给出:其中是神经网络模型的输出值,电动车所经过路径上任意一点的坐标,电动车在障碍物区域以外的约束条件为:。
13.其次,计算路径点之间的连线不在障碍物区域的目标函数,由以下公式给出:其中表示障碍物,表示当前路径与下一路径点的连线表示移动障碍物的数
量,路径点之间的连线不在障碍物区域的约束条件为:当前路径与下一路径点的连线与移动障碍物没有交集。
14.最后,计算电动车可及时躲避移动障碍物的最短路径目标函数,由以下公式给出:电动车可及时躲避移动障碍物的最短路径目标函数约束条件为其中,计算电动车在时刻遇到突然出现得障碍物时,需要保持充足的刹车距离的临界安全距离,由以下公式给出:其中,是临界安全距离是时刻前方障碍物移动的速度是时刻电动车与前方移动障碍物的相对速度,临界安全距离约束条件为:已设定的临界安全距离为5m计算电动车行驶路径最短距离,由以下公式给出:其中是时刻电动车行驶的路径最短距离,是电动车当前位置的坐标是电动车下一点位置坐标。
15.用各项目标函数相乘作为所有个体的适应度评价函数,具体由以下公式给出:;式中,双变异遗传算法的适应度函数,是电动车行驶的路径点不在移动障碍物区域内的目标函数,是路径点之间的连线不在障碍物区域的目标函数,是电动车可及时躲避移动障碍物的最短路径目标函数,约束条件为:。
16.步骤五、统计种群中可行解的数量,计算第t代种群精英变异比率和随机生成比率,由以下公式给出:其中,是第代种群精英变异比率是第代种群随机变异比率,是种群的总数量是第代种群中所有可行解的数量。
17.步骤六、对可行解的集合进行精英保留操作,由以下公式给出:
其中是第代中能保留到下代种群可行解的数量,在当代种群中可行解的数量小于当代种群精英变异数量时,则保留到下一代种群可行解数量取当代可行解的数量,在当代种群中可行解的数量大于或等于当代种群精英变异数量时,则保留到下一代种群的可行解数量取当代种群精英变异数量。
18.步骤七、对非可行解进行交叉、变异操作,具体操作如下:首先,对可行解进行交叉操作表示对种群中非可行解交叉操作,采用左半部分交叉或右半部分交叉方式。在事先设定的交叉概率大于50%采用左半部分交叉法,在在事先设定的交叉概率大于50%采用右半部分交叉法;左半部分匹配交叉选点,在种群中随机选择两个个体,在染色体左半部分随机选择两个交叉点,将两条父代染色体交叉点之间的匹配区域进行交换基因位,交叉后形成两条新染色体,若染色体上匹配区域内、外出现重复编码,则匹配区域外编码不变,匹配区域内的重复编码处根据两个父代的重复编码进行相互替换,从而得到两条子代。
19.其次,对可行解进行变异操作表示对种群中非可行解变异操作,采用两点交换突变法或翻转突变法,在事先设定的突变概率小于50%采用两点交换突变法,在事先设定的突变概率大于50%采用翻转突变法;若采用两点翻转法,在种群中随机选择一个个体,并选两个变异位,两个个体在变异点之间基因位进行翻转,得到一个新个体。若采用两点交换突变法,在种群中随机选择一个个体,并选两个变异位,两个个体在变异点之间直接进行基因位交换,得到一个新个体。
20.步骤八、经过以上操作后,得到的可行解和非可行解组成过渡种群,并计算过渡种群的适应度。
21.步骤九、对过渡种群进行择优保留、替换,最终形成适应度最强的新种群。
22.步骤十、设置终止条件,判断是否(是进化代数,设或者种群已收敛);如果是,运行结束,此时种群中最优个体就是规划出来的距离最短不发生碰撞路径;如果不是,令种群修改交叉概率和变异概率并转到第四步。
23.本发明的优点在于:本发明一种基于神经网络和双变异遗传算法的电动车防碰撞路径规划方法,综合考虑了电动车行驶路径需避开移动障碍物区域要求、临界安全距离要求和路径点之间距离最短要求,建立了动态环境信息神经网络模型和适应度函数,采用了交叉算子和变异算子,提高了种群的多样性,避免了局部路径最优,提高了种群的质量,解决了当电动车前方突然出现障碍物时,能快速重新规划最短且平滑路径,保障电动车安全稳定避障,提高了电动车的安全性以及到达目标点的效率性;
附图说明
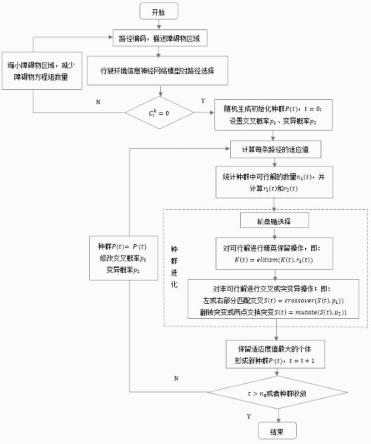
24.图1为本发明电动车行驶路径规划方法流程图。
25.图2为本发明电动车行驶路径二维空间坐标系示意图。
26.图3为本发明电动车动态行驶环境信息神经网络模型示意图。
27.图4为本发明左半部分匹配交叉选点示意图。
28.图5为本发明翻转突变法示意图。
29.图6为本发明两点交换突变法示意图
具体实施方式
30.下面将结合附图和实例对本发明进一步的详细说明。
31.本发明一种基于神经网络和双变异遗传算法电动车防碰撞路径规划方法,如图1所示,具体步骤如下:步骤一、电动车行驶的路径进行编码,描述障碍物区域,具体步骤如下:首先,对电动车行驶的路径进行编码,在每一代种群中,每一条染色体的第一个基因位的取值都是电动车当前的位置,最后一个基因位的取值是电动车所经过路径上任意一点的坐标,路径上各点的连线就是算法要规划出的路径。
32.其次,描述障碍物区域,如图2所示;针对电动车的行驶环境构建电动车行驶路径二维空间坐标系,建立多边形表示障碍物区域,该区域用不等式组表示,具体为:其中,和分别表示移动障碍物任意顶点的坐标。
33.步骤二、建立电动车行驶环境信息神经网络模型,如图3所示;对电动车行驶路径进行选择,电动车行驶环境信息神经网络模型,是一个三层网络模型,输入层是电动车行驶路径的任意一点坐标、中间层和输出层是神经元节点的激发函数,具体由以下公式给出:其中,是电动车行驶路径的任意一点坐标,是中间层和输出层是神经元节点激发函数采用阶跃函数,和是输入层到中间层权值分别是顶层结点的输入、输出和阈值分别是中间层第结点的输入、输出和阈值。
34.首先,中间层到第结点的阈值由以下公式给出:其中是第障碍物的起始坐标为是第障碍物在时刻位置坐
标是第障碍物在时刻的运动速度和是第障碍物在坐标中的运动分量。
35.其次,输入层到中间层的权值和顶层结点的阈值由以下方法得出:描述移动障碍物区域的不等式、的系数作为神经网络模型输入层到中间层的权值,不等式的个数减去0.5后的相反数作为顶层结点的阈值。
36.最后,由该模型可知电动车任意行驶路径点的坐标相对于模型输出只有0和1,当时表示电动车经过的路径点坐标在障碍物区域内表示不在障碍物区域内。
37.步骤三、随机生成初始种群,并设置初始交叉概率,变异概率。
38.步骤四、计算初始种群适应度,得到可行解的集合和非可行解集合,具体为:首先,利用环境信息神经网络模型,计算电动车行驶的路径点不在移动障碍物区域内的目标函数,由以下公式给出:其中是神经网络模型的输出值,电动车所经过路径上任意一点的坐标,电动车在障碍物区域以外的约束条件为:。
39.其次,计算路径点之间的连线不在障碍物区域的目标函数,由以下公式给出:其中表示障碍物,表示当前路径与下一路径点的连线表示移动障碍物的数量,路径点之间的连线不在障碍物区域的约束条件为:当前路径与下一路径点的连线与移动障碍物没有交集。
40.最后,计算电动车可及时躲避移动障碍物的最短路径目标函数,由以下公式给出:电动车可及时躲避移动障碍物的最短路径目标函数约束条件为其中,计算电动车在时刻遇到突然出现得障碍物时,需要保持充足的刹车距离的临界安全距离,由以下公式给出:其中,是临界安全距离是时刻前方障碍物移动的速度是时刻电动车与前方移动障碍物的相对速度,临界安全距离约束条件为:已设定的临界安全距离为5m计算电动车行驶路径最短距离,由以下公式给出:其中是时刻电动车行驶的路径最短距离,是电动车当前位置的坐标是电动车下一点位置坐标。
41.用各项目标函数相乘作为所有个体的适应度评价函数,具体由以下公式给出:
;式中,双变异遗传算法的适应度函数,是电动车行驶的路径点不在移动障碍物区域内的目标函数,是路径点之间的连线不在障碍物区域的目标函数,是电动车可及时躲避移动障碍物的最短路径目标函数,约束条件为:。
42.步骤五、统计种群中可行解的数量,计算第t代种群精英变异比率和随机生成比率,由以下公式给出:其中,是第代种群精英变异比率是第代种群随机变异比率,是种群的总数量是第代种群中所有可行解的数量。
43.步骤六、对可行解的集合进行精英保留操作,由以下公式给出:其中是第代中能保留到下代种群可行解的数量,在当代种群中可行解的数量小于当代种群精英变异数量时,则保留到下一代种群可行解数量取当代可行解的数量,在当代种群中可行解的数量大于或等于当代种群精英变异数量时,则保留到下一代种群的可行解数量取当代种群精英变异数量。
44.步骤七、对非可行解进行交叉、变异操作,具体操作如下:首先,对可行解进行交叉操作表示对种群中非可行解交叉操作,如图4所示:采用左半部分交叉或右半部分交叉方式。在事先设定的交叉概率大于50%采用左半部分交叉法,在在事先设定的交叉概率大于50%采用右半部分交叉法;左半部分匹配交叉选点,在种群中随机选择两个个体,在染色体左半部分随机选择两个交叉点,将两条父代染色体交叉点之间的匹配区域进行交换基因位,交叉后形成两条新染色体,若染色体上匹配区域内、外出现重复编码,则匹配区域外编码不变,匹配区域内的重复编码处根据两个父代的重复编码进行相互替换,从而得到两条子代。
45.其次,对可行解进行变异操作表示对种群中非可行解变异操作,如图5和图6所示:采用两点交换突变法或翻转突变法,在事先设定的突变概率小于50%采用两点交换突变法,在事先设定的突变概率大于50%采用翻转突变法;若采用两点翻转法,在种群中随机选择一个个体,并选两个变异位,两个个体在变异点之间基因位进行翻转,得到一个新个体。若采用两点交换突变法,在种群中随机选择一个个体,并选两个变异位,两个个体在变异点之间直接进行基因位交换,得到一个新个体。
46.步骤八、经过以上操作后,得到的可行解和非可行解组成过渡种群,并计算过
渡种群的适应度。
47.步骤九、对过渡种群进行择优保留、替换,最终形成适应度最强的新种群。
48.步骤十、设置终止条件,判断是否(是进化代数,设或者种群已收敛);如果是,运行结束,此时种群中最优个体就是规划出来的距离最短不发生碰撞路径;如果不是,令种群修改交叉概率和变异概率并转到第四步。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1