一种静态推靠式旋转导向钻井系统动力学分析方法与流程
本发明涉及石油钻井工具和管柱力学,具体地说,涉及一种静态推靠式旋转导向钻井系统动力学分析方法。
背景技术:
1、旋转导向系统是高效开发复杂油气藏的杀手锏技术,代表着当今钻井技术最高水平。旋转导向系统不同于传统滑动导向方式,其可以在钻柱始终旋转的状态下连续、闭环进行轨迹控制,极大提高了机械钻速和轨迹控制精度。
2、由于旋转导向系统工作中始终处于旋转状态,使得钻柱始终伴随着横向、纵向、扭转等耦合振动及拉、压、弯、扭等复杂载荷,并存在井壁碰撞及钻压、扭矩等动态干扰,使得工具在井下的受力与振动情况异常复杂。此类高精密测控装置对井下振动较为敏感,现场中因振动引起的系统失效、测量数据失准等问题常有发生。因此,搞清钻柱尤其是高精密测控装置所在底部钻具的力学特性,对于预测和控制静态推靠式旋转导向井下振动具有重大意义。
3、现有研究中存在两个难点:(1)钻柱是具有大细长比的柔性体,在充满流体的狭长井眼中高速旋转,承受着耦合振动、复杂载荷和随机碰撞,由于动态因素及非线性条件过于复杂,静力学已无法满足研究需求,需要建立考虑动态特性的钻柱动力学模型;(2)由于静态推靠式旋转导向系统特殊的工具结构及工作原理,其导向头上存在驱动轴、非旋转外套、翼肋等机械结构,驱动轴跟随钻柱本体结构始终高速旋转,非旋转外套通过上、下两个滑动轴承与驱动轴连接进而基本保持静止,翼肋在非旋转外套外部用于支撑井壁给钻头提供所需的导向力,其边界条件较为复杂,需要深入研究工具结构,给出针对性的边界条件处理方法。
4、现有方法中,均未能全部解决上述两个问题。针对现有技术存在的问题,本发明提供了一种静态推靠式旋转导向钻井系统动力学分析方法。
技术实现思路
1、为解决现有技术中的问题,本发明提供了一种静态推靠式旋转导向钻井系统动力学分析方法,所述方法包含:
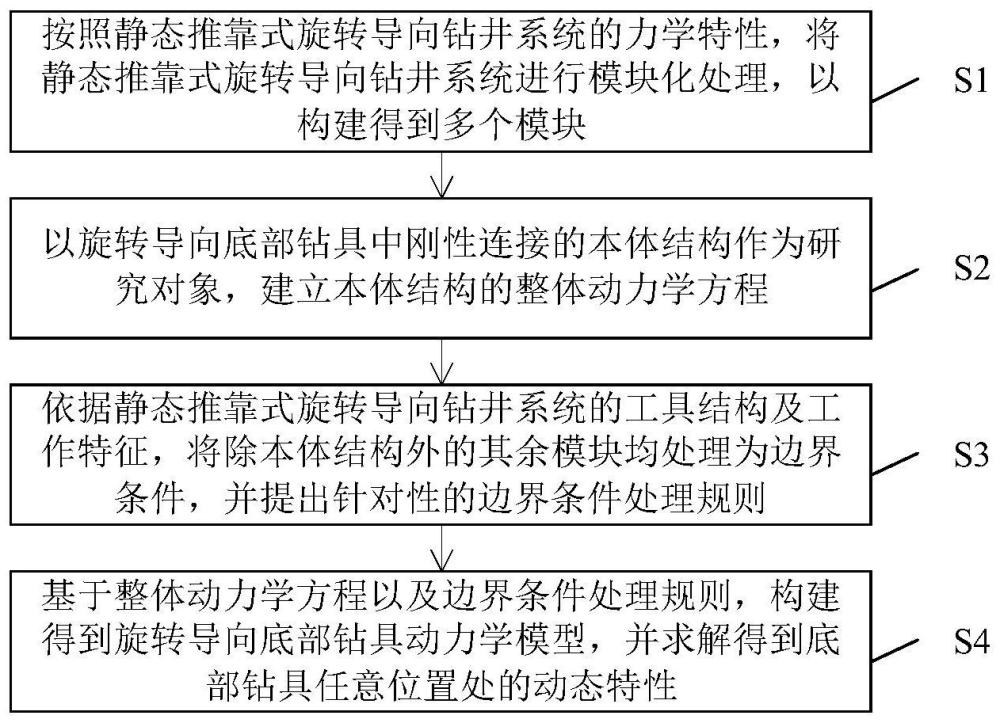
2、按照静态推靠式旋转导向钻井系统的力学特性,将所述静态推靠式旋转导向钻井系统进行模块化处理,以构建得到多个模块;
3、以旋转导向底部钻具中刚性连接的本体结构作为研究对象,建立所述本体结构的整体动力学方程;
4、依据所述静态推靠式旋转导向钻井系统的工具结构及工作特征,将除所述本体结构外的其余模块均处理为边界条件,并提出针对性的边界条件处理规则;
5、基于所述整体动力学方程以及所述边界条件处理规则,构建得到旋转导向底部钻具动力学模型,并求解得到底部钻具任意位置处的动态特性。
6、根据本发明的一个实施例,所述模块包含但不限于:顶驱模块、钻杆模块、底部钻具模块、钻头模块、井筒模块,其中,所述底部钻具模块包含所述静态推靠式旋转导向钻井系统中的各类仪器及上部钻铤、加重钻杆,所述井筒模块为所述静态推靠式旋转导向钻井系统钻进形成的井眼轨迹。
7、根据本发明的一个实施例,通过以下步骤建立所述本体结构的整体动力学方程:
8、建立井口坐标系、井眼坐标系以及单元局部坐标系共三套笛卡尔坐标系;
9、根据所述静态推靠式旋转导向钻井系统的典型钻具结构,将所述本体结构处理为可变截面的三维弹性梁,并根据有限元方法将所述三维弹性梁在关键位置离散,划分为多个节点及自由度的可考虑剪切变形的铁木辛柯梁单元;
10、推导所述梁单元的动能、势能、广义力表达式,将各表达式带入拉格朗日方程中,推导得到所述梁单元的有限元动力学方程,并组合所有梁单元对应的有限元动力学方程,得到所述本体结构的整体动力学方程。
11、根据本发明的一个实施例,所述井口坐标系以井口位置为原点,以正北、正东、垂深为坐标轴方向,用于描述井眼轨迹,所述井眼坐标系以井眼轴线任意节点为原点,以轴线切线、井眼高边、扭方位方向为坐标轴方向,用于描述底部钻具的位置与变形,所述局部坐标系以钻具轴线任意节点为原点,以钻具轴线、钻具横截面为三个坐标轴方向,用于描述底部钻具轴线的扭转情况。
12、根据本发明的一个实施例,所述关键位置包含但不限于:仪器端面、变截面位置、推靠力作用位置。
13、根据本发明的一个实施例,根据有限元方法将所述三维弹性梁在所述关键位置离散,划分为多个2节点12自由度的可考虑剪切变形的铁木辛柯梁单元,其中,梁单元节点位移矢量表示为:
14、{qe}=[uzi,uxi,uyi,θzi,θxi,θyi,uzj,uxj,uyj,θzj,θxj,θyj]t
15、其中,qe为梁单元节点位移矢量;uz、ux、uy为井眼坐标系z、x、y轴的梁单元节点位移,m;θz、θx、θy为局部坐标系中z、x、y轴相对于井眼坐标系z、x、y轴的梁单元节点转角,rad;i和j为梁单元的节点编号。
16、根据本发明的一个实施例,所述本体结构的整体动力学方程表示为:
17、
18、其中,q为广义变量;[m]为全局质量矩阵;[k]为全局刚度矩阵;[c]为全局阻尼矩阵;{f}为全局外力向量。
19、根据本发明的一个实施例,所述边界条件处理规则包含钻柱-井筒接触边界,使用转子动力学中圆盘转子与外约束的处理方法,在预设接触点位置处添加无质量的圆盘转子,采用恒定接触刚度来描述钻柱与井筒间的接触力,具体为:
20、
21、其中,fn为接触力,n;χ为钻柱与井壁之间的间隙,m;kc为接触刚度,n/m,为钻柱与井壁岩石之间的等效刚度系数。
22、根据本发明的一个实施例,所述边界条件处理规则包含顶驱边界,顶驱将钻柱上端铰支在井口中心位置,以固定转速带动钻柱顺时针方向旋转,则顶驱边界为3个位移自由度被约束,周向为顺时针方向固定转速,具体为:
23、
24、其中,uz、ux、uy分别为井眼坐标系中的梁单元节点位移,m;θz为梁单元节点周向转角,rad;ω0为顶驱转速,r/min。
25、根据本发明的一个实施例,所述边界条件处理规则包含钻杆等效边界,将所述钻杆模块等效为扭转弹簧来连接顶驱与底部钻具,起到传递转速与扭矩的作用,具体为:
26、
27、其中,kt为钻杆等效扭转刚度,n·m;lp为钻杆长度,m;g为剪切模量,pa;iz为梁单元极惯性矩,m4。
28、根据本发明的一个实施例,所述边界条件处理规则包含底部钻具上端边界,底部钻具上端点铰支在井眼中心处,即约束3个位移自由度,具体为:
29、uz(0)=ux(0)=uy(0)=0
30、其中,uz、ux、uy分别为井眼坐标系中的梁单元节点位移,m。
31、根据本发明的一个实施例,所述边界条件处理规则包含钻头等效边界,底部钻具下端通过钻头与地层接触,会受到井筒约束、地层反向作用的钻压与扭矩作用,将钻头视为满眼,即钻头节点两个横向位移自由度受到约束,具体为:
32、ux(lb)=uy(lb)=0
33、其中,ux、uy分别为井眼坐标系中的梁单元节点位移,m;lb为底部钻具长度,m;
34、破岩过程中钻压是随钻头扭转波动的,将钻压处理为随钻头转角呈正弦变化的函数,具体为:
35、wb=w0+ζw0sin(nθzb)
36、其中,wb为钻头处实际钻压,n;w0为钻压的稳态幅值,n;ζ为钻压波动幅度,与钻头纵向振动程度有关;n为激励因子;θzb为钻头转角,rad;
37、钻头反扭矩的大小可根据钻头的运动状态及钻柱施加的主动扭矩分为三种情况,包括粘滞相、粘滞向滑脱过渡、滑脱相,具体为:
38、
39、其中,tb为钻头处实际扭矩,n·m;g为剪切模量,pa;iz为梁单元极惯性矩,m4;le为最下端梁单元长度,m;θz1为钻头节点周向转角,rad;θz2为钻头上一个节点周向转角,rad;ωb为钻头转速,r/min;δ为粘滞相临界转速,r/min;rb为钻头外径,m;μs为静摩擦系数;μk为动摩擦系数;dc为衰减系数;γeq为滑移率。
40、根据本发明的一个实施例,所述边界条件处理规则包含非旋转外套等效边界,非旋转外套通过上、下两个滑动轴承支撑在驱动轴上,与驱动轴为非刚性连接,属于独立于旋转导向底部钻具的非旋转结构,将非旋转外套处理为等效质量块附加在上、下滑动轴承所在的驱动轴位置,具体为:
41、
42、其中,mn为非旋转滑套质量,kg;mu为上滑动轴承等效质量,kg;au为上滑动轴承横截面积,m2;lu为上滑动轴承长度,m;md为下滑动轴承等效质量,kg;ad为下滑动轴承横截面积,m2;ld为下滑动轴承长度,m;ρ为导向头钢材密度,kg/m3。
43、根据本发明的一个实施例,所述边界条件处理规则包含翼肋推靠力边界,翼肋推靠力是指在钻进过程中通过可伸缩翼肋推靠井壁,来给钻头一个侧向切削力,从而实现在旋转钻进过程中的实时导向,导向力可等效为大小与方向不变的两个集中力作用在上、下滑动轴承处,具体为:
44、
45、其中,fsteer为翼肋推靠力,n;fu为上滑动轴承处导向力,n;fd为下滑动轴承处导向力,n;ln为非旋转外套长度,m;ls1为翼肋作用点距上滑动轴承距离,m;ls2为翼肋作用点距下滑动轴承距离,m;lu为上滑动轴承长度,m;ld为下滑动轴承长度,m;
46、导向力作用在上、下滑动轴承处时,会产生附加扭矩,具体为:
47、
48、其中,mu为上滑动轴承处扭矩,n·m;ru为上滑动轴承公轴半径,m;md为下滑动轴承处扭矩,n·m;rd为下滑动轴承公轴半径,m。
49、根据本发明的一个实施例,所述边界条件处理规则包含弯曲井筒中钻柱初始变形处理,由于弯曲井筒的约束作用,旋转导向底部钻具会产生初始变形,即钻具从直线状态到与井眼轴线重合的弯曲状态,对于以梁单元离散的底部钻具而言,在弯曲井眼约束下底部钻具的初始变形可通过在梁单元节点处施加初始位移表示,即可将笔直的钻柱处理成与井眼轴线重合的形状,任意梁单元节点处的初始位移具体为:
50、
51、其中,n为井眼轨迹的南北坐标,m;e为井眼轨迹的东西坐标,m;d为井眼轨迹的垂深,m;s为井眼轨迹的井深,m;α为井斜角,°;为方位角,°;i为梁单元的节点编号;le为最下端梁单元长度,m。
52、根据本发明的一个实施例,采用2阶精度的hht-α隐式法求解所述旋转导向底部钻具动力学模型,在任意时间,根据hht-α递推公式将所述本体结构的整体动力学方程改写为:
53、
54、其中,[m]为全局质量矩阵;[k]为全局刚度矩阵;[c]为全局阻尼矩阵;{f}为全局外力向量;t为时间,s;△t为极小时间间隔,s;{qt+δt}为t+△t时刻位移;为t+△t时刻速度;为t+△t时刻加速度;{qt}为t时刻位移;为t时刻速度;αh为阻尼控制参数。
55、根据本发明的一个实施例,所述动态特性包含但不限于动态载荷谱、应力谱、应变谱、位移谱、加速度谱。
56、根据本发明的另一个方面,还提供了一种存储介质,其包含用于执行如上任一项所述的方法步骤的一系列指令。
57、本发明提供了一种静态推靠式旋转导向钻井系统动力学分析方法,既考虑了旋转导向真实的动态工况,提高了计算精度;又做了针对性的等效处理,提高了计算效率。本发明提供了考虑静态推靠式旋转导向真实工作状态与结构特征的底部钻具动力学建模方法和边界条件处理方法,并采用2阶精度的hht-α隐式法进行求解,可准确、高效、低成本地实现对旋转导向底部钻具安全性的钻前预测与钻后分析,为形成一种基于数据驱动的静态推靠式旋转导向动态特性虚拟仿真系统打下理论基础。
58、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分内容从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!