一种用于便携式免散瞳眼底照相机的拍摄定位方法及系统与流程
1.本发明涉及眼科仪器技术领域,特别涉及一种用于便携式免散瞳眼底照相机的拍摄定位方法及系统。
背景技术:
2.目前,通过视网膜可以直接观察到毛细血管和神经,因此,通过观察视网膜不仅仅可以检测眼部的问题,还可以间接发现其他病症的情况,例如:糖尿病并发症和高血压等;
3.眼底相机是用来拍摄视网膜的专用设备,通过光学系统对人体视网膜进行成像,获取眼底图像;在相机拍摄时,拍摄人员往往根据经验进行拍摄,拍摄的图像的位置相对应的存在偏差,如何实现拍摄图像的定位是亟需解决的技术问题;
4.因此,本发明提供了一种用于便携式免散瞳眼底照相机的拍摄定位方法及系统。
技术实现要素:
5.本发明提供一种用于便携式免散瞳眼底照相机的拍摄定位方法及系统,用以通过根据瞳孔中心与成像中心的偏移量对眼底照相机进行第一位置调整,同时根据当前获取到的视盘位置和照明光源反光点位置与标准位置模板的位置关系对眼底照相机进行第二位置调整,为眼底照相机的拍摄定位提供了便利,保障了拍摄定位的准确率,确保眼底图像的标准程度。
6.本发明提供了一种用于便携式免散瞳眼底照相机的拍摄定位方法,包括:
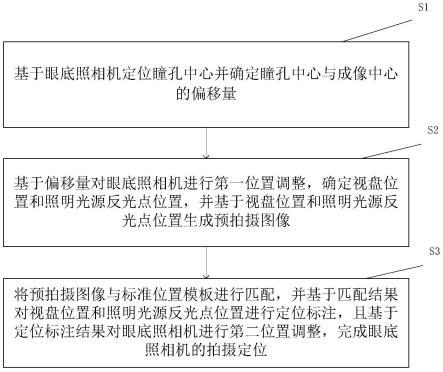
7.s1:基于眼底照相机定位瞳孔中心并确定瞳孔中心与成像中心的偏移量;
8.s2:基于偏移量对眼底照相机进行第一位置调整,确定视盘位置和照明光源反光点位置,并基于视盘位置和照明光源反光点位置生成预拍摄图像;
9.s3:将预拍摄图像与标准位置模板进行匹配,并基于匹配结果对视盘位置和照明光源反光点位置进行定位标注,且基于定位标注结果对眼底照相机进行第二位置调整,完成眼底照相机的拍摄定位。
10.优选的,一种用于便携式免散瞳眼底照相机的拍摄定位方法,s1中,基于眼底照相机定位瞳孔中心,包括:
11.基于眼底照相机推进过程实时采集包含眼部区域的人脸图像,并基于预设比例范围从人脸图像中框选出目标眼部区域;
12.将目标眼部区域在眼底照相机的显示屏幕上进行显示,并基于显示结果确定目标眼部区域的第一眼角点和第二眼角点,且基于第一眼角点和第二眼角点对目标眼部区域进行修正;
13.基于修正结果对目标眼部区域进行灰度化处理,并基于灰度化处理确定目标眼部区域内的图像特征,且基于图像特征得到瞳孔中心。
14.优选的,一种用于便携式免散瞳眼底照相机的拍摄定位方法,s1中,确定瞳孔中心与成像中心的偏移量,包括:
15.获取得到的瞳孔中心,并将瞳孔中心在眼底照相机的显示屏幕上进行显示,且基于显示结果基于眼底照相机的显示屏幕上的预设坐标系确定瞳孔中心在显示屏幕上的目标坐标值;
16.同时,确定显示屏幕上成像中心的理论坐标值,并将目标坐标值与理论坐标值进行比较,得到瞳孔中心与成像中心的相对方向;
17.基于目标坐标值以及理论坐标值得到瞳孔中心与成像中心的目标距离,并基于相对方向以及目标距离得到瞳孔中心与成像中心的偏移量。
18.优选的,一种用于便携式免散瞳眼底照相机的拍摄定位方法,s2中,基于偏移量对眼底照相机进行第一位置调整,包括:
19.获取瞳孔中心与成像中心的偏移量,并将偏移量在眼底照相机的显示屏幕上进行显示;
20.基于显示结果确定将瞳孔中心向成像中心靠近的修正方向以及修正距离,并基于预设标记符号在显示屏幕上进行显示;
21.基于显示结果向用户发送位置调整指示提醒,并基于位置调整指示提醒对眼底照相机的当前拍摄位置进行第一位置调整。
22.优选的,一种用于便携式免散瞳眼底照相机的拍摄定位方法,s2中,确定视盘位置和照明光源反光点位置,并基于视盘位置和照明光源反光点位置生成预拍摄图像,包括:
23.基于第一位置调整结果通过预设光源向预设反光点区域发射照明光源,并基于预设标尺确定预设反光点区域内照明光源的反光点位置,同时,基于照明光源获取初始眼底图像;
24.基于初始眼底图像确定眼底半径,并基于视盘与眼底半径的比例关系对初始眼底图像进行拆分,且基于拆分结果确定视盘候选区域;
25.提取视盘候选区域中的血管平均厚度以及分散程度,并基于血管平均厚度以及分散程度确定血管汇聚趋势,且基于血管汇聚趋势确定视盘位置方向;
26.基于视盘位置方向进行边缘检测,确定视盘边界信息,并基于视盘边界信息确定视盘中心位置;
27.基于视盘中心位置以及反光点位置得到视盘位置和照明光源反光点位置。
28.优选的,一种用于便携式免散瞳眼底照相机的拍摄定位方法,基于视盘边界信息确定视盘中心位置,包括:
29.获取得到的视盘位置,并基于视盘位置设定目标追踪点;
30.基于目标追踪点对眼底照相机进行聚焦,并在聚焦处理后预拍摄第一眼底图像,同时,接收眼底图像的拍摄指令,并基于拍摄指令拍摄眼部区域的第二眼底图像;
31.将第一眼底图像与第二眼底图像进行匹配,当第一眼底图像与第二眼底图像中的视盘位置一致时,将第二眼底图像判定为预拍摄图像;
32.否则,确定第二眼底图像中目标追踪点与第一眼底图像中目标追踪点的第一距离,同时,确定第二眼底图像中视盘位置与基准视盘位置的第二距离,并基于第一距离和第二距离控制眼底照相机对视盘位置进行追踪,且基于追踪结果生成预拍摄图像。
33.优选的,一种用于便携式免散瞳眼底照相机的拍摄定位方法,s3中,将预拍摄图像与标准位置模板进行匹配,并基于匹配结果对视盘位置和照明光源反光点位置进行定位标
注,包括:
34.获取得到的预拍摄图像,并基于预设拍摄要求在预拍摄图像中确定目标关键点集合,同时,将预拍摄图像与标准位置模板进行匹配,并基于匹配结果确定目标关键点集合中各目标关键点与标准位置模板中各标准关键点的位置关系;
35.基于标记业务从预设标记规则库中匹配目标标记符号,并基于位置关系在预设坐标系中确定目标关键点以及标准关键点的位置坐标,且基于目标标记符号根据位置坐标分别在预拍摄图像与标准位置模板对目标关键点以及标准关键点进行定位标注。
36.优选的,一种用于便携式免散瞳眼底照相机的拍摄定位方法,基于目标标记符号根据位置坐标分别在预拍摄图像与标准位置模板对目标关键点以及标准关键点进行定位标注,包括:
37.获取定位标注结果,并基于定位标注结果提取目标关键点的第一亮度阈值以及标准关键点的第二亮度阈值,且在第一亮度阈值小于第二亮度阈值时,确定第一亮度阈值与第二亮度阈值的亮度偏差,且基于亮度偏差确定对照明光源反光点位置的第一调整阈值;
38.同时,基于定位标注结果确定目标关键点与标准关键点的位置偏差,并基于位置偏差确定对眼底照相机位置的第二调整阈值;
39.基于第一调整阈值以及第二调整阈值对眼底照相机进行第二位置调整。
40.优选的,一种用于便携式免散瞳眼底照相机的拍摄定位方法,基于第一调整阈值以及第二调整阈值对眼底照相机进行第二位置调整,包括:
41.分别提取目标关键点与标准关键点对应的第一属性信息和第二属性信息,并基于第二位置调整过程实时监测目标关键点与标准关键点对应的第一属性信息和第二属性信息的匹配度,并在匹配度大于或等于预设阈值时,判定位置调整合格;
42.同时,基于判定结果触发最佳拍摄时机提示,并将最佳拍摄时机在眼底照相机的显示屏幕上进行显示提醒,完成对眼底照相机的拍摄定位。
43.优选的,一种用于便携式免散瞳眼底照相机的拍摄定位系统,包括:
44.偏移量确定模块,用于基于眼底照相机定位瞳孔中心并确定瞳孔中心与成像中心的偏移量;
45.位置调整模块,用于基于偏移量对眼底照相机进行第一位置调整,确定视盘位置和照明光源反光点位置,并基于视盘位置和照明光源反光点位置生成预拍摄图像;
46.定位模块,用于将预拍摄图像与标准位置模板进行匹配,并基于匹配结果对视盘位置和照明光源反光点位置进行定位标注,且基于定位标注结果对眼底照相机进行第二位置调整,完成眼底照相机的拍摄定位。
47.本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
48.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
49.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
50.图1为本发明实施例中一种用于便携式免散瞳眼底照相机的拍摄定位方法的流程图;
51.图2为本发明实施例中一种用于便携式免散瞳眼底照相机的拍摄定位方法中s1的流程图;
52.图3为本发明实施例中一种用于便携式免散瞳眼底照相机的拍摄定位系统的结构图。
具体实施方式
53.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
54.实施例1:
55.本实施例提供了一种用于便携式免散瞳眼底照相机的拍摄定位方法,如图1所示,包括:
56.s1:基于眼底照相机定位瞳孔中心并确定瞳孔中心与成像中心的偏移量;
57.s2:基于偏移量对眼底照相机进行第一位置调整,确定视盘位置和照明光源反光点位置,并基于视盘位置和照明光源反光点位置生成预拍摄图像;
58.s3:将预拍摄图像与标准位置模板进行匹配,并基于匹配结果对视盘位置和照明光源反光点位置进行定位标注,且基于定位标注结果对眼底照相机进行第二位置调整,完成眼底照相机的拍摄定位。
59.该实施例中,基于眼底照相机定位瞳孔中心指的是通过瞳孔识别算法,在眼底相机前推过程中,实时定位瞳孔中心。
60.该实施例中,成像中心是在眼底照相机上提前设定好的,用于为生成高质量的眼底图像提供位置参考。
61.该实施例中,瞳孔中心与成像中心的偏移量指的是获取到的瞳孔中心与成像中心之间的相对距离。
62.该实施例中,第一位置调整指的是将定位到的瞳孔中心与成像中心在眼底照相机的显示屏幕上进行显示,并根据显示结果确定需要对眼底照相机当前姿态调整的方向、调整的角度以及调整的距离等,且第一位置调整的目的是为了确保瞳孔中心与成像中心重合。
63.该实施例中,视盘位置指的是通过眼底照相机确定的眼睛的中的淡红色圆盘状结构在成像时的位置情况。
64.该实施例中,照明光源反光点位置指的是外界光源进行反射的点,通过确保照明光源反光点在最佳照明区域内,从而实现通过反光照亮眼睛,从而便于在拍摄眼底图像时,确保眼底图像的清洗可见度。
65.该实施例中,预拍摄图像指的是根据视盘位置以及照明光源反光点位置在眼底照相机的显示屏幕上显示的当前画面。
66.该实施例中,标准位置模板是提前设定好的,用于表征在拍摄眼底图像时,视盘以及照明光源反光点的最佳位置。
67.该实施例中,基于匹配结果对视盘位置和照明光源反光点位置进行定位标注指的
是将当前图像中的视盘位置和照明光源反光点位置与标准位置模板上的视盘位置和照明光源反光点位置分别采用不同的标注符号进行标注,从而便于根据标注结果调整眼底照相机的角度以及距离和方向。
68.该实施例中,第二位置调整指的是根据标准位置模板中视盘位置和照明光源反光点位置与预拍摄图像中的视盘位置和照明光源反光点位置对眼底照相机的位置进行调整,目的是为了确保标准位置模板中视盘位置和照明光源反光点位置与预拍摄图像中的视盘位置和照明光源反光点位置重合。
69.上述技术方案的有益效果是:通过根据瞳孔中心与成像中心的偏移量对眼底照相机进行第一位置调整,同时根据当前获取到的视盘位置和照明光源反光点位置与标准位置模板的位置关系对眼底照相机进行第二位置调整,为眼底照相机的拍摄定位提供了便利,保障了拍摄定位的准确率,确保眼底图像的标准程度。
70.实施例2:
71.在实施例1的基础上,本实施例提供了一种用于便携式免散瞳眼底照相机的拍摄定位方法,如图2所示,s1中,基于眼底照相机定位瞳孔中心,包括:
72.s11:基于眼底照相机推进过程实时采集包含眼部区域的人脸图像,并基于预设比例范围从人脸图像中框选出目标眼部区域;
73.s12:将目标眼部区域在眼底照相机的显示屏幕上进行显示,并基于显示结果确定目标眼部区域的第一眼角点和第二眼角点,且基于第一眼角点和第二眼角点对目标眼部区域进行修正;
74.s13:基于修正结果对目标眼部区域进行灰度化处理,并基于灰度化处理确定目标眼部区域内的图像特征,且基于图像特征得到瞳孔中心。
75.该实施例中,眼底照相机推进过程指的是当眼底照相机由远及近,向眼部区域靠近的过程。
76.该实施例中,预设比例范围是提前设定好的,用于在人脸图像初步框选眼部区域图像。
77.该实施例中,目标眼部区域指的是从人脸图像中框选出包含眼部区域的范围,具体可以是眉毛以下和鼻子以上的区域。
78.该实施例中,显示屏幕是提前设定好的,是眼底照相机的一部分,用于显示采集到的眼部区域的图像信息。
79.该实施例中,第一眼眼角点指的是内眼角点,其中,内眼角点指的是眼睛区域在水平方向上靠近鼻梁一侧的眼角点。
80.该实施例中,第二眼角点指的是外眼角点,其中,外眼角点指的是眼睛区域在水平方向上靠近耳朵一侧的眼角点。
81.该实施例中,基于第一眼角点和第二眼角点对目标眼部区域进行修正指的是对目标眼部区域的范围进一步缩小,从而便于准确定位瞳孔中心。
82.该实施例中,图像特征指的是眼部区域中各像素点的灰度值以及清晰度等,从而便于根据图像特征确定瞳孔中心。
83.上述技术方案的有益效果是:通过眼底照相机的推进过程实时人脸图像,并对人脸图像进行分析,实现从人脸图像中准确划分出包含眼睛的目标眼部区域,并根据眼角点
对得到目标眼部区域进行修正,实现根据修正结果对眼部区域内眼睛的特征进行准确分析,从而实现对瞳孔中心进行准确可靠的定位,为实现对眼底照相机的拍摄定位提供了便利,保障了定位的准确率。
84.实施例3:
85.在实施例1的基础上,本实施例提供了一种用于便携式免散瞳眼底照相机的拍摄定位方法,s1中,确定瞳孔中心与成像中心的偏移量,包括:
86.获取得到的瞳孔中心,并将瞳孔中心在眼底照相机的显示屏幕上进行显示,且基于显示结果基于眼底照相机的显示屏幕上的预设坐标系确定瞳孔中心在显示屏幕上的目标坐标值;
87.同时,确定显示屏幕上成像中心的理论坐标值,并将目标坐标值与理论坐标值进行比较,得到瞳孔中心与成像中心的相对方向;
88.基于目标坐标值以及理论坐标值得到瞳孔中心与成像中心的目标距离,并基于相对方向以及目标距离得到瞳孔中心与成像中心的偏移量。
89.该实施例中,预设坐标系是提前设定好的,用于通过眼底照相机确定当前眼部区域的瞳孔中心在显示屏幕上的位置,从而便于确保拍摄得到的眼底图像的准确可靠率。
90.该实施例中,目标坐标值指的是当前获取到的瞳孔中心在显示屏幕上的坐标值。
91.该实施例中,理论坐标值指的是成像中心在显示屏上的固定位置,当瞳孔中心与成像中心重合时,判定符合拍摄要求。
92.该实施例中,相对方向指的是显示屏幕上显示的瞳孔中心的位置在成像中心的距离方位,具体可以是瞳孔中心在成像中心的北侧或是南侧等。
93.该实施例中,目标距离指的是瞳孔中心与成像中心在显示屏幕上的直线距离。
94.上述技术方案的有益效果是:通过显示屏幕上的预设坐标系实现对瞳孔中心与成像中心之间的相对方向以及目标距离进行准确可靠的确定,从而实现对瞳孔中心与成像中心偏移量进行准确有效的分析,为实现对眼底照相机的拍摄定位提供了便利,保障了拍摄眼底图像的准确可靠性。
95.实施例4:
96.在实施例1的基础上,本实施例提供了一种用于便携式免散瞳眼底照相机的拍摄定位方法,s2中,基于偏移量对眼底照相机进行第一位置调整,包括:
97.获取瞳孔中心与成像中心的偏移量,并将偏移量在眼底照相机的显示屏幕上进行显示;
98.基于显示结果确定将瞳孔中心向成像中心靠近的修正方向以及修正距离,并基于预设标记符号在显示屏幕上进行显示;
99.基于显示结果向用户发送位置调整指示提醒,并基于位置调整指示提醒对眼底照相机的当前拍摄位置进行第一位置调整。
100.该实施例中,修正方向指的是将瞳孔中心向成像中心靠近时,需要将眼底照相机进行移动的方向。
101.该实施例中,修正距离指的是将瞳孔中心与成像中心重合时,需要对眼底照相机进行移动的距离。
102.该实施例中,预设标记符号是提前设定好的,用于在眼底照相机的显示屏幕上显
示需要移动的方向和距离。
103.该实施例中,位置调整指示提醒指的是向用户发送提醒,提醒用户根据预设标记符号对眼底照相机的位置进行调整。
104.上述技术方案的有益效果是:通过根据偏移量实现对瞳孔中心与成像中心融合时,需要移动的方向以及距离进行准确分析,并将分析结果在眼底照相机的显示屏幕上进行显示,从而便于根据显示结果对眼底照相机的位置进行调整,保障了对眼底照相机拍摄定位的准确率。
105.实施例5:
106.在实施例1的基础上,本实施例提供了一种用于便携式免散瞳眼底照相机的拍摄定位方法,s2中,确定视盘位置和照明光源反光点位置,并基于视盘位置和照明光源反光点位置生成预拍摄图像,包括:
107.基于第一位置调整结果通过预设光源向预设反光点区域发射照明光源,并基于预设标尺确定预设反光点区域内照明光源的反光点位置,同时,基于照明光源获取初始眼底图像;
108.基于初始眼底图像确定眼底半径,并基于视盘与眼底半径的比例关系对初始眼底图像进行拆分,且基于拆分结果确定视盘候选区域;
109.提取视盘候选区域中的血管平均厚度以及分散程度,并基于血管平均厚度以及分散程度确定血管汇聚趋势,且基于血管汇聚趋势确定视盘位置方向;
110.基于视盘位置方向进行边缘检测,确定视盘边界信息,并基于视盘边界信息确定视盘中心位置;
111.基于视盘中心位置以及反光点位置得到视盘位置和照明光源反光点位置。
112.该实施例中,预设光源是提前设定好的,用于在通过眼底照相机获取眼底图像时,向眼部区域提供反射光线,从而便于确保最终拍摄得到的眼底图像的图像质量。
113.该实施例中,预设反光点区域指的是对光线进行反射的位置,目的是将照明光源的光线反射至眼部区域。
114.该实施例中,预设标尺是提前在预设反光点区域设定好的,目的是为了确定对照明光源进行反射的具体位置。
115.该实施例中,反光点位置指的是照明光源发生反射的位置点。
116.该实施例中,初始眼底图像指的是在照明光源的反射光线反射至眼部区域后,通过眼底照相机获取到的眼部图像。
117.该实施例中,眼底半径指的是眼部区域的长度。
118.该实施例中,视盘与眼底半径的比例关系是提前已知的,是经过多次实验确定的一个平均水平。
119.该实施例中,视盘候选区域指的是对初始眼底图像进行拆分,去除其中与视盘无关的干扰图像区域后,得到的包含视盘的眼部图像,与初始眼底图像相比,干扰图像范围更小,目的是为了提高确定视盘位置的效率。
120.该实施例中,血管汇聚趋势指的是眼部区域中血管聚集的趋势。
121.该实施例中,基于血管汇聚趋势确定视盘位置方向折叠式血管汇聚密度越大的方向即为视盘所在的方向。
122.该实施例中,视盘边界信息指的是视盘与眼部其他区域之间的分界线。
123.该实施例中,基于视盘边界信息确定视盘中心位置指的是根据视盘边界信息向视盘内部进行逐步筛查,最终确定视盘中心的位置。
124.上述技术方案的有益效果是:通过预设光源在预设反光点区域进行反射,从而提高眼部区域的亮度,并在反射后获取眼部区域的初始眼底图像,对获取到的初始眼底图像进行分析,得到眼部区域的血管特征,最后根据血管特征实现对视盘位置的确定,通过确定视盘位置以及照明光源反光点位置,提高了对眼底照相机拍摄定位的准确率,同时也便于保障最终得到的眼底图像的质量。
125.实施例6:
126.在实施例5的基础上,本实施例提供了一种用于便携式免散瞳眼底照相机的拍摄定位方法,基于视盘边界信息确定视盘中心位置,包括:
127.获取得到的视盘位置,并基于视盘位置设定目标追踪点;
128.基于目标追踪点对眼底照相机进行聚焦,并在聚焦处理后预拍摄第一眼底图像,同时,接收眼底图像的拍摄指令,并基于拍摄指令拍摄眼部区域的第二眼底图像;
129.将第一眼底图像与第二眼底图像进行匹配,当第一眼底图像与第二眼底图像中的视盘位置一致时,将第二眼底图像判定为预拍摄图像;
130.否则,确定第二眼底图像中目标追踪点与第一眼底图像中目标追踪点的第一距离,同时,确定第二眼底图像中视盘位置与基准视盘位置的第二距离,并基于第一距离和第二距离控制眼底照相机对视盘位置进行追踪,且基于追踪结果生成预拍摄图像。
131.该实施例中,目标追踪点指的是根据视盘位置在视盘中设定的虚拟标记点,通过判断目标追踪点的位置从而实现对视盘位置进行实时追踪。
132.该实施例中,预拍摄第一眼底图像指的是在设定好目标追踪点后,获取到的当前眼底情况的实时图像,并在显示屏幕上进行显示。
133.该实施例中,第二眼底图像指的是在接收到拍摄指令后,对眼部区域进行拍摄后得到的图像,此时,由于眼睛会随时转动,并不能保证将视盘有效的记录在第二眼底图像中。
134.该实施例中,预拍摄图像指的是对眼部区域进行图像采集后得到的眼底图像。
135.该实施例中,第一距离指的是当眼睛转动后,视盘位置发生改变,导致视盘上的目标追踪点与第一眼底图像中的目标追踪点的位置发生的距离偏差。
136.该实施例中,基准视盘位置是提前设定好的,用于表征视盘需要在眼底照相机中展示的位置。
137.上述技术方案的有益效果是:通过根据视盘位置在视盘上模拟设定目标追踪点,并将聚焦后得到的第一眼底图像与在接收到拍摄指令后拍摄到的第二眼底图像进行匹配,实现在眼底图像拍摄过程中,对视盘位置进行实时追踪,从而保障了对眼底图像拍摄的准确率以及可靠率,同时也为眼底照相机的在拍摄过程中的定位提供了便利。
138.实施例7:
139.在实施例1的基础上,本实施例提供了一种用于便携式免散瞳眼底照相机的拍摄定位方法,s3中,将预拍摄图像与标准位置模板进行匹配,并基于匹配结果对视盘位置和照明光源反光点位置进行定位标注,包括:
140.获取得到的预拍摄图像,并基于预设拍摄要求在预拍摄图像中确定目标关键点集合,同时,将预拍摄图像与标准位置模板进行匹配,并基于匹配结果确定目标关键点集合中各目标关键点与标准位置模板中各标准关键点的位置关系;
141.基于标记业务从预设标记规则库中匹配目标标记符号,并基于位置关系在预设坐标系中确定目标关键点以及标准关键点的位置坐标,且基于目标标记符号根据位置坐标分别在预拍摄图像与标准位置模板对目标关键点以及标准关键点进行定位标注。
142.该实施例中,标准关键点与目标关键点在标准位置模板与预拍摄图像中的标记类型以及标记作用一致。
143.该实施例中,预拍摄要求是提前设定好的,用于衡量对眼底图像拍摄的亮度以及视盘显示位置的要求。
144.该实施例中,目标关键点集合指的是在预设拍摄图像中设定好的主要识别点,通过对识别点进行分析,可实现对预拍摄图像的标准度进行校验。
145.该实施例中,目标关键点是目标关键点集合中包含的元素,是预拍摄图像中的不同位置的标识点。
146.该实施例中,标准关键点是标准模板中的不同位置的标识点
147.该实施例中,标记业务指的是需要实现的标记目的,具体可以是用于标记关键点分别在预拍摄图像与标准位置模板上的具体位置。
148.该实施例中,预设标记规则库是提前设定好的,用于存储不同的标记符号。
149.该实施例中,目标标记符号指的是适用于对当前预拍摄图像以及标准模板中的关键点进行标记的符号,是预设标记规则库中的一种。
150.该实施例中,预设坐标系是提前设定好的,用于确定目标关键点以及标准关键点在不同图像中的具体位置。
151.上述技术方案的有益效果是:通过在预拍摄视频中设定目标关键点,并将目标关键点与标准位置模板中的标准关键点进行匹配,从而实现对当前获取到的预拍摄图像的拍摄情况进行准确有效的把握,并根据目标关键点与标准关键点的位置关系对目标关键点以及标准关键点进行定位标注,从而为眼底照相机的拍摄定位提供了便利,保障了眼底图像的拍摄的合格性。
152.实施例8:
153.在实施例7的基础上,本实施例提供了一种用于便携式免散瞳眼底照相机的拍摄定位方法,基于目标标记符号根据位置坐标分别在预拍摄图像与标准位置模板对目标关键点以及标准关键点进行定位标注,包括:
154.获取定位标注结果,并基于定位标注结果提取目标关键点的第一亮度阈值以及标准关键点的第二亮度阈值,且在第一亮度阈值小于第二亮度阈值时,确定第一亮度阈值与第二亮度阈值的亮度偏差,且基于亮度偏差确定对照明光源反光点位置的第一调整阈值;
155.同时,基于定位标注结果确定目标关键点与标准关键点的位置偏差,并基于位置偏差确定对眼底照相机位置的第二调整阈值;
156.基于第一调整阈值以及第二调整阈值对眼底照相机进行第二位置调整。
157.该实施例中,第一亮度阈值指的是预拍摄图像中各目标关键点的像素亮度。
158.该实施例中,第二亮度阈值指的是标准位置模板中标准关键点的像素亮度。
159.该实施例中,亮度偏差指的是第一亮度阈值与第二亮度阈值的差值大小。
160.该实施例中,第一调整阈值指的是需要对照明光源反光点位置调整的程度。
161.该实施例中,位置偏差指的是目标关键点与标准关键点相差的距离。
162.该实施例中,第二调整阈值指的是需要根据标准关键的位置对目标关键点的位置进行调整的距离。
163.上述技术方案的有益效果是:通过对预拍摄图像中目标关键点的亮度值预标准位置模板中标准关键点的亮度值进行比较,实现对照明光源反光点位置的第一调整阈值进行准确有效的确定,其次,通过定位标注结果,实现对预拍摄图像中目标关键点的第二调整阈值进行准确有效的分析,最后,通过第调整阈值以及第二调整阈值实现对眼底照相机的位置进行准确有效的纠正,保障了对眼底照相机定位的准确率,同时也确保了最终得到的眼底图像的标准程度。
164.实施例9:
165.在实施例8的基础上,本实施例提供了一种用于便携式免散瞳眼底照相机的拍摄定位方法,基于第一调整阈值以及第二调整阈值对眼底照相机进行第二位置调整,包括:
166.分别提取目标关键点与标准关键点对应的第一属性信息和第二属性信息,并基于第二位置调整过程实时监测目标关键点与标准关键点对应的第一属性信息和第二属性信息的匹配度,并在匹配度大于或等于预设阈值时,判定位置调整合格;
167.同时,基于判定结果触发最佳拍摄时机提示,并将最佳拍摄时机在眼底照相机的显示屏幕上进行显示提醒,完成对眼底照相机的拍摄定位。
168.该实施例中,第一属性信息指的是目标关键点的亮度以及分布位置等。
169.该实施例中,第二属性信息指的是标准关键点的亮度以及分布位置等。
170.该实施例中,预设阈值是提前设定好的,用于表征目标关键点与标准关键点之间的匹配程度是否满足预期要求。
171.该实施例中,最佳拍摄时机提示指的是当前时刻可以确保拍摄得到的眼底图像的效果最佳,并在眼底照相机的显示屏幕上进行显示。
172.上述技术方案的有益效果是:通过确定目标关键点的第一属性信息以及标准关键点的第二属性信息,实现在对眼底照相机进行第二位置调整的过程中,实时监测目标关键点与标准关键点的匹配度,从而便于在匹配度满足要求时,及时触发最佳拍摄时机提示,并在显示屏幕上进行显示,从而实现对眼底照相机进行准确有效的定位,保障了拍摄得到的眼底图像的可靠性以及标准性。
173.实施例10:
174.本实施例提供了一种用于便携式免散瞳眼底照相机的拍摄定位系统,如图3所示,包括:
175.偏移量确定模块,用于基于眼底照相机定位瞳孔中心并确定瞳孔中心与成像中心的偏移量;
176.位置调整模块,用于基于偏移量对眼底照相机进行第一位置调整,确定视盘位置和照明光源反光点位置,并基于视盘位置和照明光源反光点位置生成预拍摄图像;
177.定位模块,用于将预拍摄图像与标准位置模板进行匹配,并基于匹配结果对视盘位置和照明光源反光点位置进行定位标注,且基于定位标注结果对眼底照相机进行第二位
置调整,完成眼底照相机的拍摄定位。
178.上述技术方案的有益效果是:通过根据瞳孔中心与成像中心的偏移量对眼底照相机进行第一位置调整,同时根据当前获取到的视盘位置和照明光源反光点位置与标准位置模板的位置关系对眼底照相机进行第二位置调整,为眼底照相机的拍摄定位提供了便利,保障了拍摄定位的准确率,确保眼底图像的标准程度。
179.实施例11:
180.在实施例1的基础上,s2中,生成预拍摄图像之后,还包括:
181.读取预拍摄图像,确定预拍摄图像的像素点,并基于像素点对预拍摄图像进行归一化操作,生成目标拍摄图像,并获取目标拍摄图像的像素灰度分布,同时,根据目标拍摄图像的像素灰度分布计算目标拍摄图像中的视盘位置,具体包括:
182.对预拍摄图像进行读取,确定预拍摄图像的像素点,同时,基于像素点并根据如下公式对预拍摄图像进行归一化操作,获得目标拍摄图像;
[0183][0184]
其中,m
′
(x,y)表示对预拍摄图像进行归一化操作后确定的目标拍摄图像;x表示目标拍摄图像中的像素点的横坐标;y示目标拍摄图像中的像素点的纵坐标;i表示当前像素点;n表示像素点的总个数;m(xi,yi)表示预拍摄图像;xi表示预拍摄图像的第i个像素点的横坐标;yi表示预拍摄图像的第i个像素点的纵坐标;k
xi
表示预拍摄图像的第i个像素点的横坐标的第一飘移因子且取值范围为(0.03,0.05);k
yi
表示预拍摄图像的第i个像素点的纵坐标的第一飘移因子;c
xi
表示预拍摄图像的第i个像素点的横坐标的第二飘移因子;c
yi
表示预拍摄图像的第i个像素点的纵坐标的第二飘移因子且取值范围为(0.023,0.026);
[0185]
对目标拍摄图像进行像素灰度化处理,并基于如下公式确定像素灰度化处理的目标拍摄图像中视盘水平像素点的平均灰度方差以及目标拍摄图像中视盘的垂直像素点的平均灰度方差;
[0186][0187]
其中,w(y)表示目标拍摄图像中视盘水平像素点的平均灰度方差;w(y)表示目标拍摄图像中视盘的垂直像素点的平均灰度方差;y表示目标拍摄图像中视盘的垂直坐标值;r目标拍摄图像中视盘的平均半径;v(y)表示目标拍摄图像中视盘的垂直像素点的灰度方差;v(x)表示目标拍摄图像中视盘的水平像素点的灰度方差;
[0188]
根据目标拍摄图像中视盘水平像素点的平均灰度方差以及目标拍摄图像中视盘的垂直像素点的平均灰度方差,对目标拍摄图像中视盘的位置进行评估,确定目标拍摄图像中视盘的第一位置坐标;
[0189]
获取实际视盘的第二位置坐标,并将实际视盘的第二位置坐标与目标拍摄图像中视盘的第一位置坐标进行比较,判断预拍摄图像是否合格;
[0190]
其中,当第一位置坐标与第二位置坐标相同时,则判定预拍摄图像合格;
[0191]
否则,则判定预拍摄图像不合格,并重新基于视盘位置和照明光源反光点位置生
成预拍摄图像。
[0192]
该实施例中,目标拍摄图像指的是基于预拍摄图像进行归一化处理后确定的,有利于对预拍摄图像进行精准的分析。
[0193]
该实施例中,第一飘移因子指的是预拍摄图像中像素点的照度飘移因子。
[0194]
该实施例中,第二飘移因子指的是预拍摄图像中像素点的对比度飘移因子。
[0195]
该实施例中,获取实际视盘的第二位置坐标指的是s2中基于偏移量对眼底照相机进行第一位置调整从而确定的视盘位置。
[0196]
该实施例中,根据目标拍摄图像中视盘水平像素点的平均灰度方差以及目标拍摄图像中视盘的垂直像素点的平均灰度方差,对目标拍摄图像中视盘的位置进行评估,确定目标拍摄图像中视盘的第一位置坐标,指的是根据目标拍摄图像中视盘位置的垂直像素点的平均灰度方差以及视盘位置的水平像素点的平均灰度方差,确定视盘位置的像素特征,从而可以区别于目标拍摄图像中除视盘位置部分的其余部分的像素特征,进而达到对目标拍摄图像中视盘位置的确定。
[0197]
上述技术方案的有益效果是:通过读取预拍摄图像,确定预拍摄图像的像素点,并基于像素点对预拍摄图像进行归一化操作,获得目标拍摄图像有利于对预拍摄图像进行精准的分析,通过确定目标拍摄图像的像素灰度分布,同时,根据目标拍摄图像的像素灰度分布计算目标拍摄图像中的视盘位置,通过将实际视盘位置与目标拍摄图像中的视盘位置进行比较,从而可以实现对预拍摄图像的合格性的判定,进而提高了预拍摄图像的准确性。
[0198]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1