建筑物的单体化方法、装置、及相关设备与流程
本技术涉及三维建模,具体涉及一种建筑物的单体化方法、装置、及相关设备。
背景技术:
1、实景三维作为数字城市推进实施的一项重要新型空间信息数据资源,受到了广泛的关注。受益于遥感测绘、大数据、云计算、智能感知等新技术,实景三维技术也得到了飞速发展。然而,由于实景三维数据以三角面片为基本单元的特殊数据结构形成,难以将其与地理实体直接对应,导致对大部分实景三维数据的使用仍停留在浏览的层面,造成数据资源的浪费。
2、目前通过对实景三维数据中的建筑物进行单体化,可方便对于建筑物后续的属性挂接和数据管理,并提高实景三维模型的利用率。
3、在对建筑物进行单体化时,主要是基于正射影像来提取建筑物的轮廓,但基于正射影像单独提取出的轮廓往往不够准确,导致建筑物单体化的准确度也较低。因此,如何提高建筑物单体化的准确度,是三维建模技术领域亟需解决的技术问题。
技术实现思路
1、本技术提供一种建筑物的单体化方法、装置、及相关设备,旨在解决如何提高建筑物单体化的准确度的技术问题。
2、一方面,本技术提供一种建筑物的单体化方法,所述方法包括:
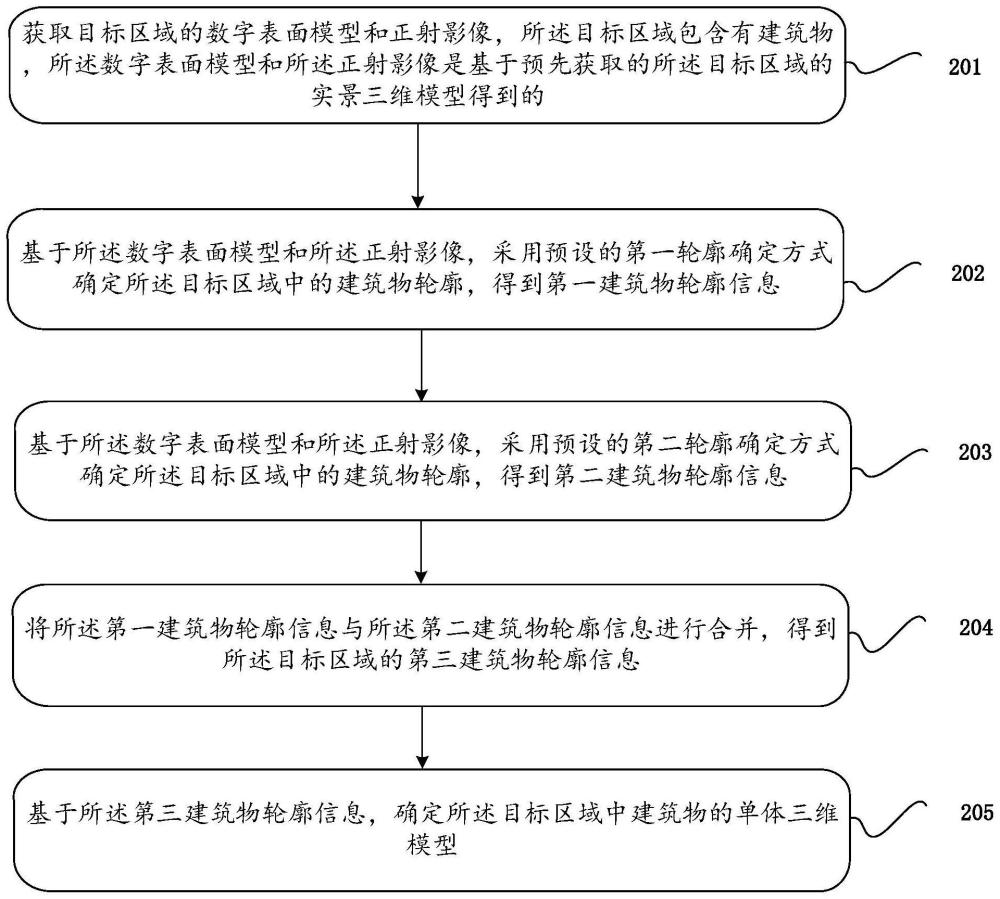
3、获取目标区域的数字表面模型和正射影像,所述目标区域包含有建筑物,所述数字表面模型和所述正射影像是基于预先获取的所述目标区域的实景三维模型得到的;
4、基于所述数字表面模型和所述正射影像,采用预设的第一轮廓确定方式确定所述目标区域中的建筑物轮廓,得到第一建筑物轮廓信息;
5、基于所述数字表面模型和所述正射影像,采用预设的第二轮廓确定方式确定所述目标区域中的建筑物轮廓,得到第二建筑物轮廓信息;
6、将所述第一建筑物轮廓信息与所述第二建筑物轮廓信息进行合并,得到所述目标区域的第三建筑物轮廓信息;
7、基于所述第三建筑物轮廓信息,确定所述目标区域中建筑物的单体三维模型。
8、在本技术一种可能的实现方式中,所述基于所述数字表面模型和所述正射影像,采用预设的第一轮廓确定方式确定所述目标区域中的建筑物轮廓,得到第一建筑物轮廓信息,包括:
9、基于所述数字表面模型,确定所述目标区域的数字高程模型;
10、获取所述数字表面模型中的高度参数和所述数字高程模型中的高度参数;
11、计算所述数字表面模型中的高度参数与所述数字高程模型中的高度参数之间的高度差值集合;
12、将所述高度差值集合与所述正射影像进行合并,得到所述目标区域的四波段合成影像,所述四波段合成影像中四个波段分别为所述正射影像中红、绿、蓝分量的强度值,以及所述高度差值集合中的高度差值;
13、基于所述四波段合成影像,确定所述第一建筑物轮廓信息。
14、在本技术一种可能的实现方式中,所述基于所述四波段合成影像,确定所述第一建筑物轮廓信息,包括:
15、将所述四波段合成影像划分为相互重叠的多个均匀格网;
16、基于预设的实例分割网络模型,提取多个均匀格网中所有格网中的建筑物轮廓,得到所有格网的建筑物轮廓集;
17、将所有格网的建筑物轮廓集进行合并,得到所述第一建筑物轮廓信息。
18、在本技术一种可能的实现方式中,所述基于所述数字表面模型和所述正射影像,采用预设的第二轮廓确定方式确定所述目标区域中的建筑物轮廓,得到第二建筑物轮廓信息,包括:
19、以预设的第一高度阈值对所述目标区域的数字表面模型与数字高程模型之间的高度差值集合进行二值化处理,得到第一二值化图,所述第一二值化图中的高度差值大于预设的第一高度阈值;
20、基于所述第一二值化图和所述正射影像,确定所述第二建筑物轮廓信息。
21、在本技术一种可能的实现方式中,所述基于所述第一二值化图和所述正射影像,确定所述第二建筑物轮廓信息,包括:
22、基于所述正射影像中像素点的红、绿、蓝分量的强度值,计算所述像素点的植被指数;
23、以预设的植被指数阈值对所述正射影像中的植被指数进行二值化处理,得到第二二值化图,将所述第二二值化图的区域作为所述正射影像中的非植被区域,所述非植被区域中的植被指数小于预设的植被指数阈值;
24、计算所述非植被区域与所述第一二值化图的并集,得到并集所在区域;
25、基于所述并集所在区域,确定所述第二建筑物轮廓信息。
26、在本技术一种可能的实现方式中,所述基于所述并集所在区域,确定所述第二建筑物轮廓信息,包括:
27、对所述正射影像进行超像素分割处理,得到所述正射影像中多个超像素区域,每一超像素区域包括多个像素;
28、计算各个超像素区域与所述并集所在区域的重合区域面积;
29、基于所述重合区域面积,确定所述多个超像素区域中的目标超像素区域;
30、将所述目标超像素区域的轮廓信息,作为所述第二建筑物轮廓信息。
31、在本技术一种可能的实现方式中,所述基于所述第三建筑物轮廓信息,确定所述目标区域中建筑物的单体三维模型,包括:
32、在所述第三建筑物轮廓信息中,确定所述第一建筑物轮廓信息与所述第二建筑物轮廓信息相交的轮廓部分,相交的轮廓部分包括属于所述第一建筑物轮廓信息的第一轮廓部分和属于所述第二建筑物轮廓信息的第二轮廓部分;
33、获取所述第一轮廓部分与所述第二轮廓部分之间的交并比;
34、若所述交并比大于预设的交并比阈值,计算相交的轮廓部分的平均高度参数;
35、若所述平均高度参数大于预设的第二高度阈值,以所述第二轮廓部分作为第四建筑物轮廓信息;
36、若所述平均高度参数小于或等于预设的第二高度阈值,以所述第一轮廓部分作为第四建筑物轮廓信息;
37、基于所述第四建筑物轮廓信息,确定所述目标区域中建筑物的单体三维模型;
38、若所述交并比小于预设的交并比阈值,不修改所述第三建筑物轮廓信息,以基于所述第三建筑物轮廓信息,确定所述目标区域中建筑物的单体三维模型。
39、另一方面,本技术提供一种建筑物的单体化装置,所述装置包括:
40、获取单元,用于获取目标区域的数字表面模型和正射影像,所述目标区域包含有建筑物,所述数字表面模型和所述正射影像是基于预先获取的所述目标区域的实景三维模型得到的;
41、第一确定单元,用于基于所述数字表面模型和所述正射影像,采用预设的第一轮廓确定方式确定所述目标区域中的建筑物轮廓,得到第一建筑物轮廓信息;
42、第二确定单元,用于基于所述数字表面模型和所述正射影像,采用预设的第二轮廓确定方式确定所述目标区域中的建筑物轮廓,得到第二建筑物轮廓信息;
43、合并单元,用于将所述第一建筑物轮廓信息与所述第二建筑物轮廓信息进行合并,得到所述目标区域的第三建筑物轮廓信息;
44、第三确定单元,用于基于所述第三建筑物轮廓信息,确定所述目标区域中建筑物的单体三维模型。
45、在本技术一种可能的实现方式中,所述第一确定单元,用于:
46、基于所述数字表面模型,确定所述目标区域的数字高程模型;
47、获取所述数字表面模型中的高度参数和所述数字高程模型中的高度参数;
48、计算所述数字表面模型中的高度参数与所述数字高程模型中的高度参数之间的高度差值集合;
49、将所述高度差值集合与所述正射影像进行合并,得到所述目标区域的四波段合成影像,所述四波段合成影像中四个波段分别为所述正射影像中红、绿、蓝分量的强度值,以及所述高度差值集合中的高度差值;
50、基于所述四波段合成影像,确定所述第一建筑物轮廓信息。
51、在本技术一种可能的实现方式中,所述第一确定单元,用于:
52、将所述四波段合成影像划分为相互重叠的多个均匀格网;
53、基于预设的实例分割网络模型,提取多个均匀格网中所有格网中的建筑物轮廓,得到所有格网的建筑物轮廓集;
54、将所有格网的建筑物轮廓集进行合并,得到所述第一建筑物轮廓信息。
55、在本技术一种可能的实现方式中,所述第二确定单元,用于:
56、以预设的第一高度阈值对所述目标区域的数字表面模型与数字高程模型之间的高度差值集合进行二值化处理,得到第一二值化图,所述第一二值化图中的高度差值大于预设的第一高度阈值;
57、基于所述第一二值化图和所述正射影像,确定所述第二建筑物轮廓信息。
58、在本技术一种可能的实现方式中,所述第二确定单元,用于:
59、基于所述正射影像中像素点的红、绿、蓝分量的强度值,计算所述像素点的植被指数;
60、以预设的植被指数阈值对所述正射影像中的植被指数进行二值化处理,得到第二二值化图,将所述第二二值化图的区域作为所述正射影像中的非植被区域,所述非植被区域中的植被指数小于预设的植被指数阈值;
61、计算所述非植被区域与所述第一二值化图的并集,得到并集所在区域;
62、基于所述并集所在区域,确定所述第二建筑物轮廓信息。
63、在本技术一种可能的实现方式中,所述第二确定单元,用于:
64、对所述正射影像进行超像素分割处理,得到所述正射影像中多个超像素区域,每一超像素区域包括多个像素;
65、计算各个超像素区域与所述并集所在区域的重合区域面积;
66、基于所述重合区域面积,确定所述多个超像素区域中的目标超像素区域;
67、将所述目标超像素区域的轮廓信息,作为所述第二建筑物轮廓信息。
68、在本技术一种可能的实现方式中,所述第二确定模块,具体用于:
69、在所述第三建筑物轮廓信息中,确定所述第一建筑物轮廓信息与所述第二建筑物轮廓信息相交的轮廓部分,相交的轮廓部分包括属于所述第一建筑物轮廓信息的第一轮廓部分和属于所述第二建筑物轮廓信息的第二轮廓部分;
70、获取所述第一轮廓部分与所述第二轮廓部分之间的交并比;
71、若所述交并比大于预设的交并比阈值,计算相交的轮廓部分的平均高度参数;
72、若所述平均高度参数大于预设的第二高度阈值,以所述第二轮廓部分作为第四建筑物轮廓信息;
73、若所述平均高度参数小于或等于预设的第二高度阈值,以所述第一轮廓部分作为第四建筑物轮廓信息;
74、基于所述第四建筑物轮廓信息,确定所述目标区域中建筑物的单体三维模型;
75、若所述交并比小于预设的交并比阈值,不修改所述第三建筑物轮廓信息,以基于所述第三建筑物轮廓信息,确定所述目标区域中建筑物的单体三维模型。
76、另一方面,本技术还提供一种计算机设备,所述计算机设备包括:
77、一个或多个处理器;
78、存储器;以及
79、一个或多个应用程序,其中所述一个或多个应用程序被存储于所述存储器中,并配置为由所述处理器执行以实现所述的建筑物的单体化方法。
80、另一方面,本技术还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器进行加载,以执行所述的建筑物的单体化方法中的步骤。
81、本技术实施例提供的建筑物的单体化方法,通过获取目标区域的数字表面模型和正射影像,目标区域包含有建筑物,数字表面模型和正射影像是基于预先获取的目标区域的实景三维模型得到的;基于数字表面模型和正射影像,采用预设的第一轮廓确定方式确定目标区域中的建筑物轮廓,得到第一建筑物轮廓信息;基于数字表面模型和正射影像,采用预设的第二轮廓确定方式确定目标区域中的建筑物轮廓,得到第二建筑物轮廓信息;将第一建筑物轮廓信息与第二建筑物轮廓信息进行合并,得到目标区域的第三建筑物轮廓信息;基于第三建筑物轮廓信息,确定目标区域中建筑物的单体三维模型。相较于传统方法,本技术实施例通过目标区域的数字表面模型和正射影像,分别以两种不同的轮廓确定方式获取第一建筑物轮廓信息和第二建筑物轮廓信息,然后对第一建筑物轮廓信息与第二建筑物轮廓信息进行合并,得到更加准确的第三建筑物轮廓信息,去确定目标区域中建筑物的单体三维模型,避免了基于正射影像单独提取轮廓,使得本技术得到单体三维模型更加准确。
- 还没有人留言评论。精彩留言会获得点赞!