基于CNN-BLS网络的雷达辐射源信号识别方法
基于cnn-bls网络的雷达辐射源信号识别方法
技术领域
1.本发明涉及电子对抗技术领域,尤其涉及基于cnn-bls网络的雷达辐射源信号识别方法。用于在雷达辐射源识别中对雷达辐射源信号进行识别分类,确保雷达辐射源信号识别分类的精确性和实时性。
背景技术:
2.雷达辐射源识别作为电子对抗侦察的重要环节,在雷达目标判型和威胁等级告警等方面有着重要作用。雷达信号脉内调制类型识别是雷达侦察系统重要组成部分,对信号类型的精准识别有助于判断敌方雷达类型、威胁等级和功用。在现代日益密集复杂的电磁环境下,新体制雷达层出不穷,信号样式复杂多变,雷达辐射源信号识别面临严峻的挑战。传统的基于五大脉冲描述字等特征参数的雷达辐射源信号识别方法,已经不能满足战场上快速、准确区分雷达辐射源信号的需求,人为设计提取特征的方法需要依靠专业知识和经验,存在针对性强,低信噪比下失效等缺陷,如何自动地从数据中获取有利于信号分类的深层本质特征成为雷达信号识别的研究热点。
3.深度学习通过训练海量数据和构建学习模型来自动获取更具分类能力的特征,近年来,国内外学者将深度学习技术应用于雷达辐射源信号识别,在低信噪比条件下,此类方法较人工规则构造特征的识别方法更具鲁棒性。ali等人使用无监督特征学习和全连接神经网络进行脉内调制识别,其在-5~15db信噪比下能达到94.5%的识别率,(详见:ali a,fany.unsupervised feature learning and automatic modulation classificationusing deep learning model[j].physical communication,2017,25(pt.1):75-84.)。虽然该方法相对于传统雷达辐射源信号识别方法来说识别率具有很大提升,能够自动提取信号分类所需要的特征,但由于其神经网络层数较少,无法充分提取数据特征,容易造成特征学习过拟合或者欠拟合。并且由于是无监督学习,容易受到数据样本干扰,对训练数据的微小波动反应过度,从而造成网络的预测性能下降。zhou等人设计了基于受限玻尔兹曼机的自动雷达信号识别方法,用于提取雷达的特征参数并对雷达信号进行识别(详见:zhou d,wang x,tian y,et al.a novel radar signal recognition method based on a deep restricted boltzmann machine[j].engineering review,2017,37 (2):165-171)。随后,井博军提出获取信号的时频图像,通过卷积神经网络(convolutional neural networks,cnn)自动学习信号时频图像的特征来进行分类识别(详见:基于深度学习的雷达辐射源识别技术研究[d].西安电子科技大学,2017)。meng等人构造了一种“end to end”的卷积神经网络调制信号识别方法,并且运用了两阶段训练法和迁移学习的思想来提高训练的效率。最终得到了较高的正确率和鲁棒性,计算开销也比传统方法小了很多(详见:meng f,chen p,wu l,et al.automatic modulation classification:a deep learning enabled approach[j].ieee transactions on vehicular technology,2018,67(11):10760-10772)。实验证明,卷积神经网络具有更强的特征提取能力,能够获得更高的信号识别准确率和较强的抗干扰能力。此后,许多人提出了基于改进的卷积神经网络的雷达辐射源信号
识别方法,如秦鑫等人使用时频分析将信号转换为时频特征图像,然后使用扩张残差网络对这些二维时频特征图进行识别,得到了非常有效的识别结果。
[0004]
尽管基于深度卷积网络的雷达辐射源信号识别方法在识别性能上取得了一定的突破,但是由于深度学习模型具有较深的网络深度,需要较多的时间训练网络模型,导致了高昂的计算代价,增加了硬件的开销成本。此外,在战场中,高昂的计算代价和高成本的硬件开销,也会影响电子对抗快速机动响应能力和高精度的实时对抗能力。
[0005]
宽度学习系统(broadlearning system,bls)是由中国澳门大学教授陈俊龙和他的学生在2018年首次提出,旨在解决大多数深度学习网络存在的结构复杂、参数量巨大、计算时间长的问题(详见:chen c,liu z.broad learning system:an effective andefficient incremental learning system without the need for deep architecture[j].ieeetransactions on neural networks&learning systems,2018,29(99):10-24.)。bls方法被应用于许多领域,如图像分类、序列预测等领域。然而,虽然bls方法在图像识别中具有较快的计算速度,可以在非常短的计算时间内得到分类结果,可有效缓解深度学习网络中训练模型的时间消耗问题,但其在高维数据中的表现却不尽人意,不能从图像像素中有效提取位置相关信息等细节特征,在雷达辐射源信号识别分类中的准确率有待提高。
[0006]
综上所述,尽管现有的基于深度卷积网络的雷达辐射源信号识别方法在识别性能上取得了一定的突破,但是这些网络模型的复杂度高、所需参数量巨大、硬件开销成本大,存在模型训练时间过长、参数量过多的问题。如何有效地平衡神经网络模型的计算代价和识别精度成为了雷达辐射源信号识别方法能否在工程中应用的关键。现有 bls方法可以有效缓解深度神经网络中模型训练时间较长的问题,但其在高维数据中的特征学习能力表现却不尽人意,识别分类的准确率不高。
技术实现要素:
[0007]
本发明的目的是提出一种基于cnn-bls网络的雷达辐射源信号识别方法。针对雷达辐射源信号识别分类,首次提出了一种基于cnn-bls网络的雷达辐射源信号识别方法,该方法通过将卷积神经网络(cnn)和宽度学习网络(bls)有效融合,实现了雷达辐射源信号识别的同时,有效平衡了神经网络模型的计算代价和识别精度,提高了雷达辐射源信号识别分类的准确率,降低了网络模型的训练时间,确保了雷达辐射源信号识别分类的实时性和精确性。
[0008]
本发明是通过以下技术方案实现的。
[0009]
本发明所述的一种基于cnn-bls网络的雷达辐射源信号识别方法,包括以下步骤:
[0010]
步骤1、构建数据集,将侦收设备接收到的雷达辐射源信号进行choi-williams时频分析,使雷达信号转化为二维时频图像。
[0011]
步骤2、对时频图像进行预处理,首先对雷达信号时频图进行灰度化处理降低图像冗余信息,然后使用图像开运算方法对图像进行降噪处理,最后进行归一化处理调整时频图大小。得到预处理后的时频图像集,将预处理后的时频图像集按照预设比例划分为训练集、验证集和测试集。
[0012]
步骤3、构建改进的cnn-bls网络。cnn-bls网络由两部分构成,分为特征提取模块
和分类识别模块,使用设计的cnn网络来提取尽可能多的细节特征信息,然后将提取的特征送入宽度学习网络(broad learning system,bls),依靠宽度学习网络快速得到识别分类结果。
[0013]
步骤4、用步骤2中的训练集样本训练cnn-bls网络。
[0014]
步骤5、对雷达辐射源信号进行识别。使用步骤2中的测试集数据输入步骤4训练完的cnn-bls网络中,完成对雷达辐射源信号的分类识别,获得识别分类结果并计算识别准确率。
[0015]
本发明步骤3所述的构建改进的cnn-bls网络,包括特征特征提取模块和分类识别模块。
[0016]
特征提取模块网络由多层卷积层组成,卷积层使用深度可分离卷积(depthwiseseparable convolution,depsconv),每一层间使用stride(卷积操作步长)进行下采样以减少数据的维度。为避免在训练过程中各层激活输入值分布发生内部协变量位移,导致反向传播时神经网络底层梯度消失,在每层做非线性变化前,先将激活输入值输入 bn层,对激活输入值进行批标准化操作。在网络模型的中后层,使用了大卷积核替代小卷积核,在下采样时,使用大卷积核,获取更大的感受野的同时,使网络提取到更多更丰富的细节特征。卷积核大小为n
×
n,n可取值为正整数3、5、7、
……
;卷积层层数可取值为正整数5、6、7、8、9、
……
。
[0017]
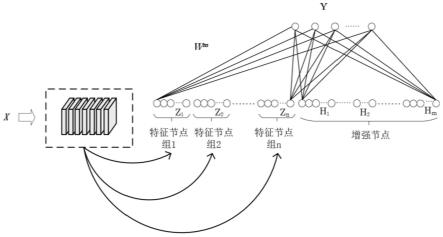
在使用特征提取模块充分提取图像中的细节特征后,将提取到的特征送入分类识别模块。分类识别模块由宽度学习网络组成,将特征提取模块中提取到的特征送入宽度学习网络中作为输入矩阵,输入数据通过线性映射变为特征节点,然后将特征节点通过非线性映射变为增强节点,最后通过宽度学习网络输出权重获得分类结果。分类识别具体流程如下:
[0018]
(a)特征节点生成。特征节点线性映射如式(1)所示:
[0019][0020]
其中,x是输入矩阵,输入矩阵经过线性函数映射产生第i组映射特征zi(i=1,2,3
…
n),是随机权重系数,特征节点组全部n组特征节点可表示为zn= [z1,z2…zn
]。
[0021]
(b)增强节点生成。特征节点经过非线性函数映射得到增强节点,记为h
j (j=1,2,...,m)如式(2)所示:
[0022][0023]
其中j表示生成增强节点的组数,增强节点组全部m组增强节点可表示为hm= [h1,h2,
……
,hm]。
[0024]
(c)获得宽度学习网络的权重。将特征节点和增强节点的输出相连接,设其为输出层的总输入,表示为a,如式(3)所示:
[0025]
y=[zn,hm]wm=aw
ꢀꢀꢀ
(3)
[0026]
y是输出层,wm是权重连接输出层和特征节点及增强节点。将求取宽度学习网络权重问题转化为一个线性方程组问题,通过求取伪逆的方法计算获得权重w。考虑到网络的输
入矩阵并非一定可逆,bls网络权重w通过岭回归求伪逆的方法求得,则 a的伪逆可由公式(4)求得:
[0027][0028]
于是通过公式(5)可以求出网络的输出连接权重w,进而获得输出结果:
[0029]
w=a
+yꢀꢀꢀ
(5)
[0030]
本发明步骤4所述的训练cnn-bls网络。包括:
[0031]
将步骤2中预处理后时频图的训练集样本输入到cnn-bls网络中训练网络。采用优化算法更新网络权值,例如adam优化算法、sgd优化算法,采用交叉熵损失函数,设置最大训练轮数q为大于等于60的正整数;加入学习率衰减策略,学习率衰减周期l为最大训练轮数范围内的任意正整数,每经过l轮训练学习率下降为当前学习率的一半。以验证集识别准确率为标准,保存识别准确率最高的网络模型。通过不断迭代更新网络超参数,当迭代次数达到设置的迭代次数时,完成神经网络的训练过程。
[0032]
本发明提供的基于cnn-bls网络的雷达辐射源信号识别方法有效的平衡了神经网络模型的计算代价和识别精度,具有训练速度快,识别精度高等特点。基于cnn-bls 算法的雷达辐射源信号识别方法在减少模型训练时间、提高实时性的同时,确保了雷达辐射源信号识别分类的精确性,实现了雷达辐射源信号识别分类的实时和精确。
附图说明
[0033]
图1为提出的cnn-bls网络模型结构图,x为雷达辐射源信号时频图,虚线框内为特征提取模块,y为输出结果。
[0034]
图2为深度可分离卷积原理图。
[0035]
图3为特征提取模块结构图。其中,input image size为输入图像大小,depsconv 为深度可分离卷积,stride为卷积操作步长,conv_n(n=1-7)为第n层卷积层。
具体实施方式
[0036]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例;基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0037]
作为本发明的一种可行实施例,在-10db到8db信噪比下每隔2db产生数量相等的不同脉内调制方式的雷达样本信号,所述不同脉内调制方式的雷达样本信号包括常规脉冲信号,线性调频信号,频率编码信号、相位编码信号以及混合调制信号等。
[0038]
本发明以10种雷达脉内调制信号为实施例作进一步说明,包括单频矩形脉冲信号 cw、线性调频信号lfm、非线性调频信号nlfm、二相编码信号bpsk、多相编码信号frank、p1、p2、p3、p4、以及频率编码信号costas信号。在-10db~8db范围内,间隔2db共10个信噪比,每个信噪比下分别对10类雷达脉内调制信号采集100个调制信号作为原始信号,得到共10000个随机雷达脉内调制信号,对于每一类信号的调制方式,均采用范围随机化参数,对所述随机雷达脉内调制信号进行choi-williams 时频分析得到时频图像,对时频图像进行归一化
和灰度处理得到对应的时频域灰度图像,将得到的10000张灰度时频图像作为训练和测试cnn-bls网络模型的雷达脉内调制信号数据集。
[0039]
步骤1、构建数据集,将侦收设备接收到的雷达辐射源信号进行choi-williams时频分析,使雷达信号转化为二维时频图像。
[0040]
步骤2、对时频图像进行预处理,首先对雷达信号时频图进行灰度化处理降低图像冗余信息,然后使用图像开运算方法对图像进行降噪处理,最后进行归一化处理调整时频图大小。得到预处理后的时频图像集,将预处理后的时频图像集按照预设比例划分为训练集、验证集和测试集。
[0041]
步骤3、构建改进的cnn-bls网络。cnn-bls网络由两部分构成,分为特征提取模块和分类识别模块,使用设计的cnn网络来提取尽可能多的细节特征信息,然后将提取的特征送入宽度学习网络bls,依靠宽度学习网络快速得到识别分类结果。
[0042]
步骤4、用步骤2中的训练集样本训练cnn-bls网络。
[0043]
步骤5、对雷达辐射源信号进行识别。使用步骤2中的测试集数据输入步骤4训练完的cnn-bls网络中,完成对雷达辐射源信号的分类识别,获得识别分类结果并计算识别准确率。
[0044]
所述的步骤3构建改进的cnn-bls网络,包括特征特征提取模块和分类识别模块。
[0045]
特征提取模块网络由7个卷积层组成,卷积层使用深度可分离卷积(depthwiseseparable convolution,depsconv),每一层间使用stride(卷积操作步长)进行下采样以减少数据的维度。为避免在训练过程中各层激活输入值分布发生内部协变量位移,导致反向传播时神经网络底层梯度消失,在每层做非线性变化前,先将激活输入值输入 bn层,对激活输入值进行批标准化操作。在网络的中后层使用了大卷积核替代小卷积核,在下采样时使用大卷积核,获取更大的感受野的同时使网络提取到更多更丰富的细节特征。第一、四、五层卷积层使用卷积核大小均为3
×
3,stride为1,第二、三、六、七层卷积层使用的卷积核大小均为5
×
5,stride为2。特征提取模型的输入图像大小128
×
128,每个卷积层的通道数分别为[16,32,64,64,64,128,256]。
[0046]
在使用特征提取模块充分提取图像中的细节特征后,将提取到的特征送入分类识别模块。分类识别模块由宽度学习网络组成,将特征提取模块中提取到的特征送入宽度学习网络中作为输入矩阵,输入数据通过线性映射变为特征节点,然后将特征节点通过非线性映射变为增强节点,最后通过宽度学习网络输出权重获得分类结果。在本实施例中设置特征节点组数n为9,每组18个特征节点数,增强节点总数为2000。分类识别具体流程如下:
[0047]
(a)特征节点生成。特征层线性映射如式(1)所示:
[0048][0049]
其中,x是输入矩阵,输入矩阵经过线性函数映射产生第i组映射特征zi(i=1,2,3
…
n),是随机权重系数,特征节点组全部n组特征节点可表示为zn= [z1,z2…zn
]。
[0050]
(b)增强节点生成。特征节点经过非线性函数映射得到增强节点,记为h
j (j=1,2,...,m)如式(2)所示:
[0051][0052]
其中j表示生成增强节点的组数,于是增强节点组全部m组增强节点可表示为 hm=[h1,h2,
……
,hm].
[0053]
(c)获得宽度学习网络的权重。将特征映射层和增强层的输出连接起来后,我们可以把它看成是输出层的总输入,表示为a。如式(3)所示:
[0054]
y=[zn,hm]wm=aw
ꢀꢀꢀ
(3)
[0055]
y是输出层,wm是权重连接输出层和特征映射节点及增强节点。将求取宽度学习网络权重问题转化为一个线性方程组问题,通过求取伪逆的方法计算获得权重w。考虑到网络的输入矩阵并非一定可逆,bls网络权重通过岭回归求伪逆的方法求得,则a的伪逆可由公式(4)求得:
[0056][0057]
于是通过公式(5)可以求出网络的输出连接权重w,进而获得输出结果。
[0058]
w=a
+yꢀꢀꢀ
(5)
[0059]
所述的步骤4训练雷达辐射源信号识别网络。包括:
[0060]
将步骤2中预处理后时频图的训练集样本输入到雷达辐射源识别网络中训练网络。采用adam优化算法更新网络权值,采用交叉熵损失函数,设置最大训练轮数为100 轮。加入学习率衰减策略,学习率衰减周期为40,每经过40轮训练学习率下降为当前学习率的一半。以验证集识别准确率为标准,保存识别准确率最高的网络模型。通过不断迭代更新网络超参数,当迭代次数达到设置的迭代次数时,完成神经网络的训练过程。
[0061]
最终本实施例获得的雷达辐射源信号识别分类准确率和模型训练时间结果如下,为了更进一步体现本发明的优势,将本发明方法与vgg16、resnet18、drn等传统基于深度卷积神经网络算法进行了比较。分别比较了模型在相同实验条件下的整体分类识别准确率和模型训练所需的时间消耗。表1、表2结果显示,基于cnn-bls算法的雷达辐射源信号识别提供了最高的分类识别准确率和最少的模型训练时间消耗。
[0062]
表1不同算法下雷达辐射源信号识别准确率
[0063][0064]
表2不同算法下模型训练时间消耗(100epoch)
[0065][0066]
以上所述仅表达了本发明的优选实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形、改进及替代,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1