动作捕捉数据获取方法及装置、存储介质、计算机设备与流程
本技术涉及计算机,尤其是涉及到一种动作捕捉数据获取方法及装置、存储介质、计算机设备。
背景技术:
1、现在市面上有越来越多的三维重建算法出现,但是所有算法的一个最大的痛点是缺少三维数据样本集。以获取宠物三维数据样本集为例,传统方式是在宠物身上部署传感器贴片,在宠物携带贴片运动的过程中拍摄宠物图片并同时获取传感器贴片采集的三维数据,利用三维数据构建三维数据样本集,从而利用二维宠物图片和三维数据进行三维重建模型训练。然而,现在市场上存在的动作捕捉设备,一般都比较昂贵,而且需要架设多台摄像机,并且需要配套给宠物相应部位部署传感器贴片,由于宠物有毛发,贴片经常会掉落,并且宠物一般也不会配合,导致大量数据不够准确。
技术实现思路
1、有鉴于此,本技术提供了一种动作捕捉数据获取方法及装置、存储介质、计算机设备,有助于降低数据获取成本以及提高数据准确性。
2、根据本技术的一个方面,提供了一种动作捕捉数据获取方法,所述方法包括:
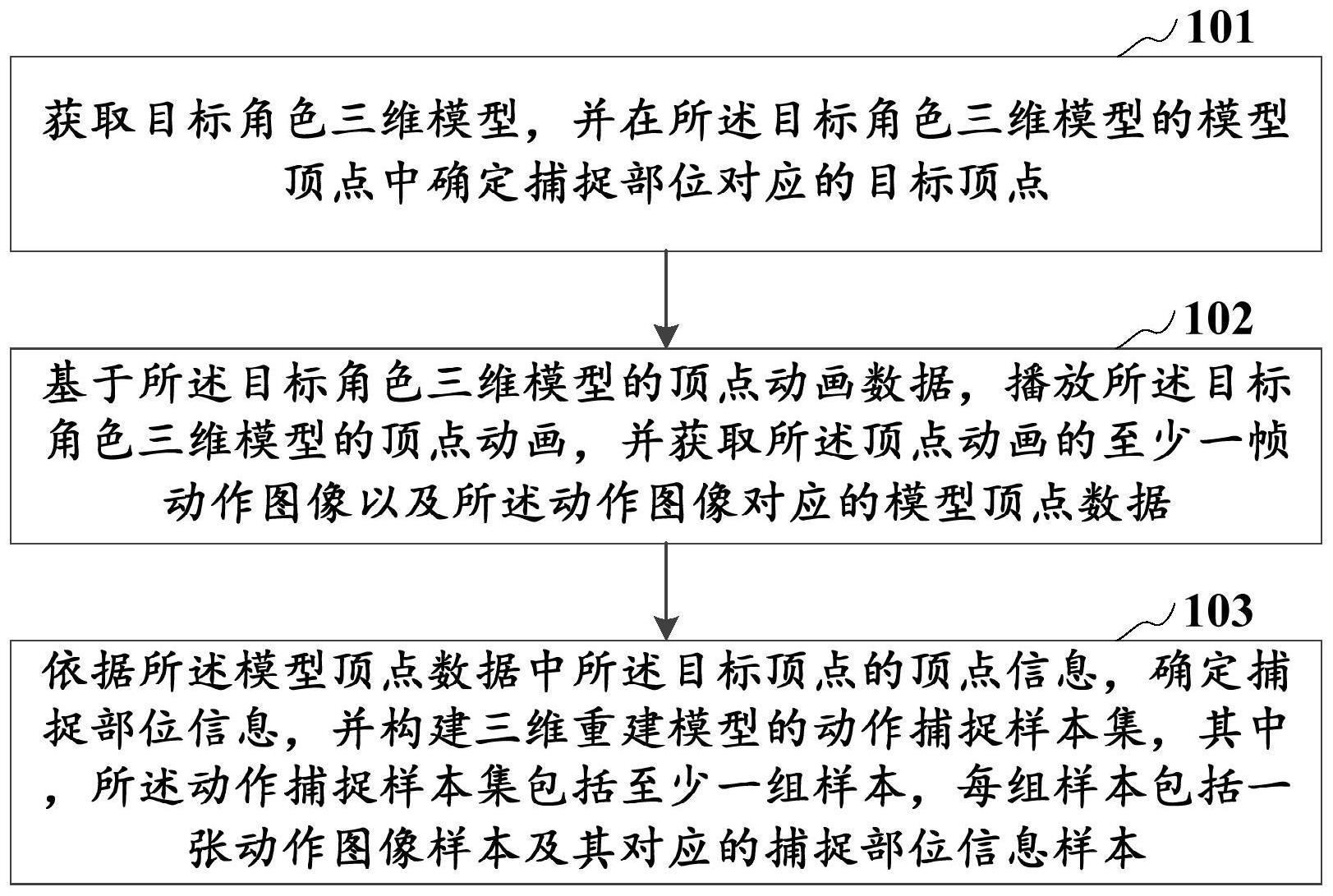
3、获取目标角色三维模型,并在所述目标角色三维模型的模型顶点中确定捕捉部位对应的目标顶点;
4、基于所述目标角色三维模型的顶点动画数据,播放所述目标角色三维模型的顶点动画,并获取所述顶点动画的至少一帧动作图像以及所述动作图像对应的模型顶点数据;
5、依据所述模型顶点数据中所述目标顶点的顶点信息,确定捕捉部位信息,并构建三维重建模型的动作捕捉样本集,其中,所述动作捕捉样本集包括至少一组样本,每组样本包括一张动作图像样本及其对应的捕捉部位信息样本。
6、可选地,所述基于所述目标角色三维模型的顶点动画数据,播放所述目标角色三维模型的顶点动画,并获取所述顶点动画的至少一帧动作图像以及所述动作图像对应的模型顶点数据,包括:
7、在三维编程软件中设置虚拟摄像头;
8、依据所述目标角色三维模型的顶点动画数据,在所述三维编程软件中控制所述目标角色三维模型动作以产生所述目标角色三维模型的顶点动画,并通过所述虚拟摄像头逐帧拍摄所述目标角色三维模型的动作,获得所述动作图像;
9、通过所述三维编程软件获取每张所述动作图像对应的模型顶点数据。
10、可选地,所述在所述目标角色三维模型的模型顶点中确定捕捉部位对应的目标顶点,包括:
11、在所述目标角色三维模型上选择至少一个第一捕捉部位;
12、针对任意第一捕捉部位,获取所述目标角色三维模型中与所述第一捕捉部位距离最近的模型顶点,作为所述第一捕捉部位对应的第一目标顶点;
13、相应地,所述依据所述模型顶点数据中所述目标顶点的顶点信息,确定捕捉部位信息,包括:
14、依据所述模型顶点数据中所述第一目标顶点的模型顶点数据,确定捕捉部位信息。
15、可选地,所述在所述目标角色三维模型的模型顶点中确定捕捉部位对应的目标顶点,包括:
16、在所述目标角色三维模型上选择至少一个第二捕捉部位;
17、针对任意第二捕捉部位,获取所述目标角色三维模型中与所述第二捕捉部位之间距离符合预设距离规则的多个模型顶点,作为所述第二捕捉部位对应的第二目标顶点,并基于所述第二捕捉部位与对应的多个第二目标顶点之间的距离,确定每个所述第二目标顶点的权重;
18、相应地,所述依据所述模型顶点数据中所述目标顶点的顶点信息,确定捕捉部位信息,包括:
19、获取所述模型顶点数据中每个所述第二捕捉部位对应的第二目标顶点的顶点信息,基于所述第二目标顶点的权重对所述第二目标顶点的顶点信息进行加权求和,并依据所述捕捉部位对应的加权求和结果,确定捕捉部位信息。
20、可选地,所述构建三维重建模型的动作捕捉样本集,包括:
21、依据所述目标角色三维模型的角色类型,获取相同角色类型的其他角色三维模型对应的捕捉部位信息,构建所述角色类型对应的三维重建模型的动作捕捉样本集;
22、所述构建三维重建模型的动作捕捉样本集之后,所述方法还包括:
23、提取所述动作捕捉样本集中所述动作图像样本对应的二维图像特征样本,并基于所述二维图像特征样本以及所述捕捉部位信息样本,训练所述角色类型对应的三维重建模型。
24、可选地,依据所述动作捕捉样本集,训练所述角色类型对应的三维重建模型之后,所述方法还包括:
25、确定待建模角色以及待建模角色类型,拍摄所述待建模角色的多帧待建模动作图像,并分别提取每帧所述待建模动作图像的待建模二维图像特征;
26、获取所述待建模角色类型对应的目标三维重建模型,将所述待建模二维图像特征输入至所述目标三维重建模型中得到所述待建模角色的捕捉部位信息,并依据所述待建模角色的捕捉部位信息构建所述待建模角色的三维模型。
27、可选地,所述目标角色三维模型包括人体三维模型和/或至少一种动物三维模型。
28、根据本技术的另一方面,提供了一种动作捕捉数据获取装置,所述装置包括:
29、顶点确定模块,用于获取目标角色三维模型,并在所述目标角色三维模型的模型顶点中确定捕捉部位对应的目标顶点;
30、信息获取模块,用于基于所述目标角色三维模型的顶点动画数据,播放所述目标角色三维模型的顶点动画,并获取所述顶点动画的至少一帧动作图像以及所述动作图像对应的模型顶点数据;
31、样本构建模块,用于依据所述模型顶点数据中所述目标顶点的顶点信息,确定捕捉部位信息,并构建三维重建模型的动作捕捉样本集,其中,所述动作捕捉样本集包括至少一组样本,每组样本包括一张动作图像样本及其对应的捕捉部位信息样本。
32、可选地,所述信息获取模块,还用于:
33、在三维编程软件中设置虚拟摄像头;
34、依据所述目标角色三维模型的顶点动画数据,在所述三维编程软件中控制所述目标角色三维模型动作以产生所述目标角色三维模型的顶点动画,并通过所述虚拟摄像头逐帧拍摄所述目标角色三维模型的动作,获得所述动作图像;
35、通过所述三维编程软件获取每张所述动作图像对应的模型顶点数据。
36、可选地,所述顶点确定模块,还用于:
37、在所述目标角色三维模型上选择至少一个第一捕捉部位;
38、针对任意第一捕捉部位,获取所述目标角色三维模型中与所述第一捕捉部位距离最近的模型顶点,作为所述第一捕捉部位对应的第一目标顶点;
39、相应地,所述样本构建模块,还用于:
40、依据所述模型顶点数据中所述第一目标顶点的模型顶点数据,确定捕捉部位信息。
41、可选地,所述顶点确定模块,还用于:
42、在所述目标角色三维模型上选择至少一个第二捕捉部位;
43、针对任意第二捕捉部位,获取所述目标角色三维模型中与所述第二捕捉部位之间距离符合预设距离规则的多个模型顶点,作为所述第二捕捉部位对应的第二目标顶点,并基于所述第二捕捉部位与对应的多个第二目标顶点之间的距离,确定每个所述第二目标顶点的权重;
44、相应地,所述样本构建模块,还用于:
45、获取所述模型顶点数据中每个所述第二捕捉部位对应的第二目标顶点的顶点信息,基于所述第二目标顶点的权重对所述第二目标顶点的顶点信息进行加权求和,并依据所述捕捉部位对应的加权求和结果,确定捕捉部位信息。
46、可选地,所述样本构建模块,还用于:依据所述目标角色三维模型的角色类型,获取相同角色类型的其他角色三维模型对应的捕捉部位信息,构建所述角色类型对应的三维重建模型的动作捕捉样本集;
47、所述装置还包括:
48、模型训练模块,用于提取所述动作捕捉样本集中所述动作图像样本对应的二维图像特征样本,并基于所述二维图像特征样本以及所述捕捉部位信息样本,训练所述角色类型对应的三维重建模型。
49、可选地,所述装置还包括:模型重建模块,用于:
50、确定待建模角色以及待建模角色类型,拍摄所述待建模角色的多帧待建模动作图像,并分别提取每帧所述待建模动作图像的待建模二维图像特征;
51、获取所述待建模角色类型对应的目标三维重建模型,将所述待建模二维图像特征输入至所述目标三维重建模型中得到所述待建模角色的捕捉部位信息,并依据所述待建模角色的捕捉部位信息构建所述待建模角色的三维模型。
52、可选地,所述目标角色三维模型包括人体三维模型和/或至少一种动物三维模型。
53、依据本技术又一个方面,提供了一种存储介质,其上存储有计算机程序,所述程序被处理器执行时实现上述动作捕捉数据获取方法。
54、依据本技术再一个方面,提供了一种计算机设备,包括存储介质、处理器及存储在存储介质上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述动作捕捉数据获取方法。
55、借由上述技术方案,本技术提供的一种动作捕捉数据获取方法及装置、存储介质、计算机设备,获取预先构建的目标角色三维模型以及针对目标角色三维模型制作的顶点动画数据,在目标角色三维模型包含的模型顶点中确定捕捉部位对应的目标顶点,依据顶点动画数据播放目标角色三维模型的顶点动画,在动画播放过程中拍摄目标角色三维模型的动作图像,并获取动作图像对应的模型顶点数据,利用模型顶点数据确定捕捉部位信息,从而基于动作图像和对应的捕捉部位信息构建用于进行三维重新模型训练的动作捕捉样本集。本技术实施例相比于传统获取样本集的方式无需进行传感器贴片部署,降低了数据获取成本,并且基于顶点动画数据控制三维模型产生动作,而非引导真实角色进行动作,提升了角色动作行为的可控性,避免贴片位置偏移导致传感器数据中会掺杂一些无效数据,提升了数据获取的准确性。
56、上述说明仅是本技术技术方案的概述,为了能够更清楚了解本技术的技术手段,而可依照说明书的内容予以实施,并且为了让本技术的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!