道路病害检测系统及其检测方法与流程
1.本发明涉及道路维护领域,特指一种道路病害检测系统及其检测方法。
背景技术:
2.传统的路面自动化巡检系统采用单一的视频分析的方法,水渍、油污、路面异物等干扰目标对于路面病害的特征会产生影响;在开放式环境下采集路面图像时,光照的分布不均是无法避免的,这一干扰因素也容易影响模型的特征提取;受道路旁的建筑物、树木、灯杆等干扰物影响,路面图像中最为常见的阴影容易导致图像整体的灰度分布出现偏差,对后续检测精度产生一定的影响;除了上述影响因素,天气环境的变化也会使得路面图像呈现多样性,影响模型的特征提取。
3.由于路面环境的复杂性和多样性,采集的路面图像会不可避免的受到光照强度、阴影、路面异物、天气环境等干扰因素的影响,使得路面图像的质量降低,最终影响到深度神经网络模型的训练及测试,从而导致传统路面病害检测的精度较低。
技术实现要素:
4.本发明的目的在于克服现有技术的缺陷,提供一种道路病害检测系统及其检测方法,解决了传统路面病害检测的精度较低的问题,通过对图像进行预处理,以减少外界因素的影响,提高采样的精准度,能够及时发现细小病害,以及时进行修护保养,从而延长路面整体使用寿命,降低养护成本。
5.实现上述目的的技术方案是:
6.本发明提供了一种道路病害检测系统,包括:
7.车体;
8.转动安装于车体的转盘,转盘沿径向设置有激光扫描器,通过转动转盘,使得激光扫描器以设定频率对路面进行扫描以测得车体至路面的距离;
9.与激光扫描器连接且安装于车体的边缘计算模块,以计算相邻两次激光扫描器测得的距离的差值;
10.与边缘计算模块控制连接且安装于车体的摄像机;以及
11.与边缘计算模块控制连接且安装于车体的定位模块,当边缘计算模块计算的差值大于设定阈值时,触发定位模块记录路面的位置以发送给云主机,并触发摄像机对路面拍照以形成图片,边缘计算模块对图片进行预处理后发送给云主机。
12.本发明道路病害检测系统,通过利用激光扫描器扫描路面,以测得路面与车体的距离,计算模块计算得出相邻两侧测得的距离的差值,若差值超过设定阈值,则触发定位模块记录路面的位置以发送给云主机,并触发摄像机对路面拍照以形成图片,边缘计算模块对图片进行预处理后发送给云主机,从而后台人员能够根据位置和图片进行进一步的分析和维护,解决了传统路面病害检测的精度较低的问题,通过对图像进行预处理,以减少外界因素的影响,提高采样的精准度,能够及时发现细小病害,以及时进行修护保养,从而延长
路面整体使用寿命,降低养护成本。
13.本发明道路病害检测系统的进一步改进在于,激光扫描器对称设置有两个,且两个激光扫描器沿转盘的直径设置,两个激光扫描器向相互远离的方向发射激光。
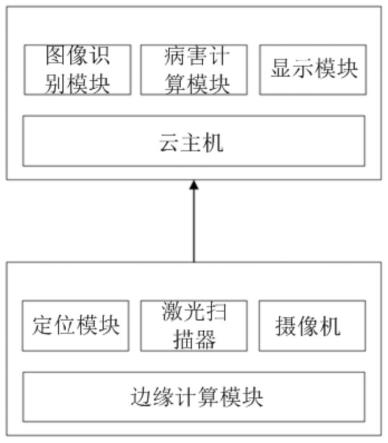
14.本发明道路病害检测系统的进一步改进在于,还包括安装于云主机且与边缘计算模块连接的图像识别模块,以识别边缘计算模块预处理后的图片中的病害区域和病害种类。
15.本发明道路病害检测系统的进一步改进在于,还包括安装于云主机且与图像识别模块连接的病害计算模块,以根据病害区域和病害种类计算得出路面的pci、rqi和pqi。
16.本发明道路病害检测系统的进一步改进在于,还包括安装于云主机且与病害计算模块和定位模块连接的显示模块,以显示地图,并根据定位模块发送的位置在地图中标注形成标注点,且于靠近标注点的位置显示对应的病害种类、pci、rqi和pqi。
17.本发明提供了一种道路病害检测系统的检测方法,包括如下步骤:
18.提供道路病害检测系统,利用车体沿待测的路面形成,并转动转盘,使得激光扫描器以设定频率对路面进行扫描以测得车体至路面的距离;
19.利用边缘计算模块计算相邻两次激光扫描器测得的距离的差值;
20.当差值大于设定阈值时,触发定位模块记录路面的位置以发送给云主机,并触发摄像机对路面拍照以形成图片,利用边缘计算模块对图片进行预处理后发送给云主机。
21.本发明道路病害检测系统的检测方法的进一步改进在于,激光扫描器沿转盘的直径设置有两个,且两个激光扫描器向相互远离的方向发射激光。
22.本发明道路病害检测系统的检测方法的进一步改进在于,还包括安装于云主机且与边缘计算模块连接的图像识别模块;
23.利用图像识别模块识别边缘计算模块预处理后的图片中的病害区域和病害种类。
24.本发明道路病害检测系统的检测方法的进一步改进在于,还包括安装于云主机且与图像识别模块连接的病害计算模块;
25.利用病害计算模块根据病害区域和病害种类计算得出路面的pci、rqi和pqi。
26.本发明道路病害检测系统的检测方法的进一步改进在于,还包括安装于云主机且与病害计算模块和定位模块连接的显示模块;
27.利用显示模块显示地图,并根据定位模块发送的位置在地图中标注形成标注点,且于靠近标注点的位置显示对应的病害种类、pci、rqi和pqi。
附图说明
28.图1为本发明道路病害检测系统的结构示意图。
29.图2为本发明道路病害检测系统中激光扫描器部分的结构示意图。
具体实施方式
30.下面结合附图和具体实施例对本发明作进一步说明。
31.参阅图1,本发明提供了一种道路病害检测系统及其检测方法,通过利用激光扫描器扫描路面,以测得路面与车体的距离,计算模块计算得出相邻两侧测得的距离的差值,若差值超过设定阈值,则触发定位模块记录路面的位置以发送给云主机,并触发摄像机对路
面拍照以形成图片,边缘计算模块对图片进行预处理后发送给云主机,从而后台人员能够根据位置和图片进行进一步的分析和维护,解决了传统路面病害检测的精度较低的问题,通过对图像进行预处理,以减少外界因素的影响,提高采样的精准度,能够及时发现细小病害,以及时进行修护保养,从而延长路面整体使用寿命,降低养护成本。下面结合附图对本发明道路病害检测系统进行说明。
32.参阅图1,图1为本发明道路病害检测系统的结构示意图。下面结合图1,对本发明道路病害检测系统进行说明。
33.如图1~2所示,本发明的道路病害检测系统,包括:
34.车体;
35.转动安装于车体的转盘,转盘沿径向设置有激光扫描器,通过转动转盘,使得激光扫描器以设定频率对路面进行扫描以测得车体至路面的距离;
36.与激光扫描器连接且安装于车体的边缘计算模块,以计算相邻两次激光扫描器测得的距离的差值;
37.与边缘计算模块控制连接且安装于车体的摄像机;以及
38.与边缘计算模块控制连接且安装于车体的定位模块,当边缘计算模块计算的差值大于设定阈值时,触发定位模块记录路面的位置以发送给云主机,并触发摄像机对路面拍照以形成图片,边缘计算模块对图片进行预处理后发送给云主机。
39.具体的,激光扫描器111对称设置有两个,且两个激光扫描器111沿转盘11的直径设置,两个激光扫描器111向相互远离的方向发射激光(沿图2中直线箭头的方向发射),在一个时间周期t内,两个激光扫描器均扫描路面,并测得路面与车体的距离为la和lb,若la和lb的差值趋于0,则说明路面没有病害,若la和lb的差值大于设定阈值,则就有病害的可能,架设车体的行驶速度为v,la和lb的扫描间隔距离k=v/2f,此时k可以用于表征路面病害扫描的精度,当车体行驶速度保持在60~80公里/小时,转盘的旋转频率保持在800~1000hz时,检测精度可达到厘米级。
40.作为本发明的一较佳实施方式,还包括安装于云主机且与边缘计算模块连接的图像识别模块,以识别边缘计算模块预处理后的图片中的病害区域和病害种类。
41.进一步的,还包括安装于云主机且与图像识别模块连接的病害计算模块,以根据病害区域和病害种类计算得出路面的pci、rqi和pqi。
42.具体的,还包括安装于云主机且与图像识别模块连接的病害计算模块,以根据病害区域和病害种类计算得出路面的pci、rqi和pqi。
43.本发明的具体实施方法如下:
44.车体沿待测的路面行驶,并按设定频率转动转盘,使得激光扫描器以设定频率对路面进行扫描,以测得车体至路面的距离;
45.利用边缘计算模块计算相邻两次激光扫描器测得的距离的差值,当差值大于设定阈值时,触发定位模块记录路面的位置以发送给云主机,并触发摄像机对路面拍照以形成图片;
46.边缘计算模块对图片进行预处理,以除去因油污、水渍和路面异物等干扰而误采样,剔除误采样和重复采样的图片,进而将处理后的图片发送给云主机;
47.云主机接收位置信息和图片后,利用图像识别模块进一步对图片进行识别,以识
别病害的种类,如坑洼、裂缝等,并识别出病害区域,将识别结果输出给病害计算模块,以计算出路面的pci、rqi和pqi等各参数值;
48.显示模块根据位置信息在地图上标注以形成标注点,并将对应的病害种类和计算出的pci、rqi、pqi等参数值显示在标注点附近,以进行可视化展示,可以利用预测模块根据历史数据进行病害发展趋势的预测,从而给道路维护提供可靠依据。
49.本发明还提供了一种道路病害检测系统的检测方法,该方法包括如下步骤:
50.提供道路病害检测系统,利用车体沿待测的路面形成,并转动转盘,使得激光扫描器以设定频率对路面进行扫描以测得车体至路面的距离;
51.利用边缘计算模块计算相邻两次激光扫描器测得的距离的差值;
52.当差值大于设定阈值时,触发定位模块记录路面的位置以发送给云主机,并触发摄像机对路面拍照以形成图片,利用边缘计算模块对图片进行预处理后发送给云主机。
53.具体的,激光扫描器沿转盘的直径设置有两个,且两个激光扫描器向相互远离的方向发射激光。
54.进一步的,还包括安装于云主机且与边缘计算模块连接的图像识别模块;
55.利用图像识别模块识别边缘计算模块预处理后的图片中的病害区域和病害种类。
56.具体的,还包括安装于云主机且与图像识别模块连接的病害计算模块;
57.利用病害计算模块根据病害区域和病害种类计算得出路面的pci、rqi和pqi。
58.具体的,还包括安装于云主机且与病害计算模块和定位模块连接的显示模块;
59.利用显示模块显示地图,并根据定位模块发送的位置在地图中标注形成标注点,且于靠近标注点的位置显示对应的病害种类、pci、rqi和pqi。
60.本发明提供的检测方法实际实施的操作方式如下:
61.车体沿待测的路面行驶,并按设定频率转动转盘,使得激光扫描器以设定频率对路面进行扫描,以测得车体至路面的距离;
62.利用边缘计算模块计算相邻两次激光扫描器测得的距离的差值,当差值大于设定阈值时,触发定位模块记录路面的位置以发送给云主机,并触发摄像机对路面拍照以形成图片;
63.边缘计算模块对图片进行预处理,以除去因油污、水渍和路面异物等干扰而误采样,剔除误采样和重复采样的图片,进而将处理后的图片发送给云主机;
64.云主机接收位置信息和图片后,利用图像识别模块进一步对图片进行识别,以识别病害的种类,如坑洼、裂缝等,并识别出病害区域,将识别结果输出给病害计算模块,以计算出路面的pci、rqi和pqi等各参数值;
65.显示模块根据位置信息在地图上标注以形成标注点,并将对应的病害种类和计算出的pci、rqi、pqi等参数值显示在标注点附近,以进行可视化展示,可以利用预测模块根据历史数据进行病害发展趋势的预测,从而给道路维护提供可靠依据。
66.以上结合附图实施例对本发明进行了详细说明,本领域中普通技术人员可根据上述说明对本发明做出种种变化例。因而,实施例中的某些细节不应构成对本发明的限定,本发明将以所附权利要求书界定的范围作为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1