同时定位与地图构建方法、装置和计算设备与流程
本技术涉及计算机,尤其涉及一种同时定位与地图构建方法、装置和计算设备。
背景技术:
1、同时定位与地图构建(simultaneous localization and mapping,slam)技术是包含机器人在内的智能设备所需使用的关键技术之一。根据所使用的传感器的不同,slam技术主要可分为基于相机的视觉slam以及基于激光雷达(light detection and ranging,ldar)的激光slam,其中视觉slam可细分为单目slam、双目slam以及rgbd-slam,激光slam又可分为基于单线激光雷达的2d激光slam以及基于多线激光雷达的3d激光slam。
2、通常可以采用视觉slam与激光slam相融合的方式,实现预测智能设备的位姿并构建智能设备所处环境的环境地图。然而,视觉slam与激光slam的融合主要基于视觉图像和激光点云中的点特征进行,点特征在视觉图像和激光点云中的存在过于普遍,而且对点特征的融合大都限于后端图位姿优化阶段,实质上难以高效且准确的完成构建环境地图。
技术实现思路
1、本技术提供了一种同时定位与地图构建方法、装置、计算设备、计算设备集群、计算机存储介质、计算机产品及芯片,能够更加高效且准确实现对智能设备进行定位并构建其所处环境的环境地图,此外所构建环境地图规模较小,有利于环境地图的复用。
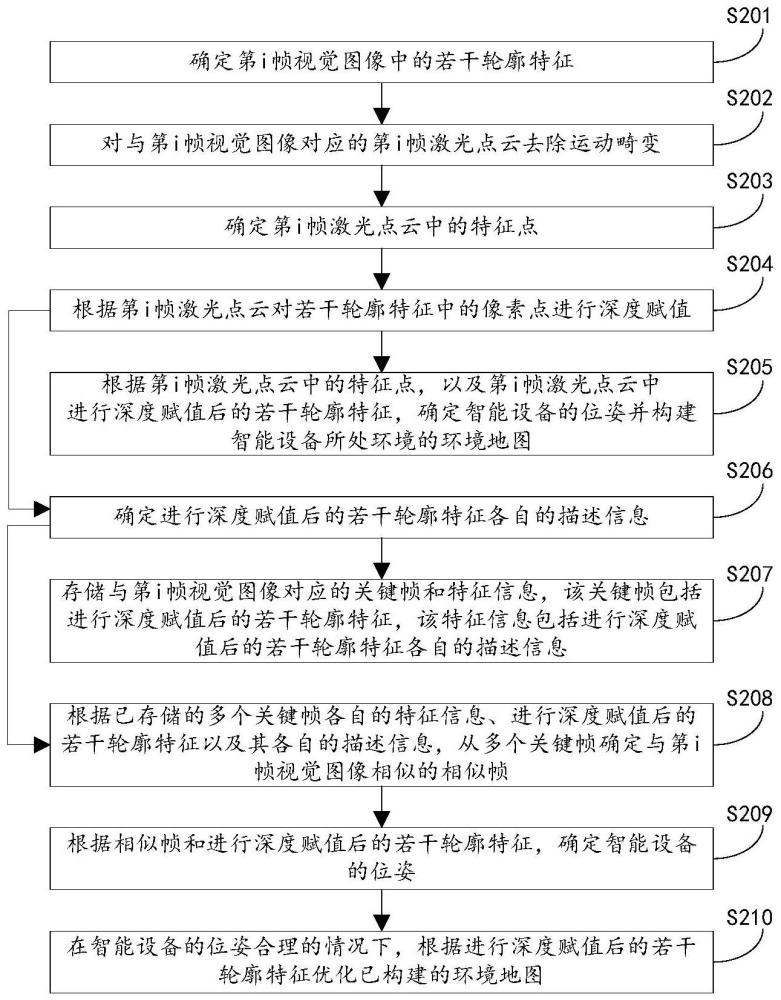
2、第一方面,本技术提供一种同时定位与地图构建方法,该方法包括:确定通过智能设备的相机获取的视觉图像中的若干轮廓特征,以及确定通过智能设备的激光雷达获取的并且与该视觉图像对应的激光点云中的特征点;此外还可以根据激光点云对若干轮廓特征中的像素点进行深度赋值;进而可以根据激光点云中的特征点和视觉图像中进行深度赋值后的若干轮廓特征,确定该智能设备的第一位姿,并构建该智能设备所处环境的环境地图。
3、如此,通过将从视觉图像中确定的若干轮廓特征,作为用于对智能设备进行定位并构建环境地图的依据,并不需要通过各种特征点法完全提取视觉图像中可能存在冗余信息的特征点,对轮廓特征和激光点云中的特征点进行融合以实现对智能设备进行定位并构建环境地图的过程中,所需处理的数据量较小,此外因去除了视觉图像中可能存在冗余信息的特征点,可以使环境地图的规模较小,而且有利于更加准确的实现对智能设备进行定位并构建更加准确的环境地图。总而言之,通过本技术实施例中提供的技术方案,可以更加高效且准确实现对智能设备进行定位并构建其所处环境的环境地图,而且所构建环境地图的规模较小而有利于环境地图的复用。
4、在一种可能的实施方式中,特征点属于轮廓点。激光点云中可能包括线点、面点和轮廓点等各种类型的特征点,可以仅提取轮廓点而并提取线点、面点等其它类型的特征点,如此则在对智能设备进行定位并构建环境地图的过程中,所需处理的数据量更小,有利于更加高效的完成对智能设备进行定位并构建环境地图。
5、在一种可能的实施方式中,该方法还包括:确定进行深度赋值后的若干轮廓特征各自的描述信息;存储与视觉图像对应的关键帧和特征信息,关键帧包括若干轮廓特征,特征信息包括进行深度赋值后的若干轮廓特征各自的描述信息。如此,通过不断新增关键帧,使得后续过程中可以基于更多的关键帧,实现更好的优化已构建的环境地图。
6、在一种可能的实施方式中,该方法还包括:根据已存储的多个关键帧各自的特征信息、进行深度赋值后的若干轮廓特征以及其各自的描述信息,从多个关键帧确定与视觉图像相似的相似帧;根据相似帧以及进行深度赋值后的若干轮廓特征,确定智能设备的第二位姿;在智能设备的第二位姿合理的情况下,根据进行深度赋值后的若干轮廓特征优化已建立的环境地图。如此,基于已存储的关键帧进行回环检测和重定位,可以对已构建的环境地图进行优化以实现对已构建的环境地图进行漂移纠正,从而提高环境地图的准确性。
7、在一种可能的实施方式中,轮廓特征的描述信息包括如下各项信息中的至少一项:轮廓类型、轮廓主轴方向以及轮廓面积。
8、在一种可能的实施方式中,根据特征点和进行深度赋值后的若干轮廓特征,确定智能设备的第一位姿,并构建智能设备所处环境的环境地图,包括:根据特征点、进行深度赋值后的若干轮廓特征以及预先配置的距离约束,构建智能合约所处环境的环境地图,其中距离约束指示属于轮廓特征的像素点与对应的目标轮廓特征间的距离需满足的条件,目标轮廓特征位于环境地图中。
9、第二方面,提供了一种同时定位与地图构建装置,该装置包括:第一确定模块,用于确定视觉图像中的若干轮廓特征,所述视觉图像通过智能设备的相机获取;第二确定模块,用于确定与所述视觉图像对应的激光点云中的特征点,所述激光点云通过所述智能设备的激光雷达获取;深度赋值模块,用于根据所述激光点云对所述若干轮廓特征中的像素点进行深度赋值;定位构图模块,用于根据所述特征点和进行深度赋值后的所述若干轮廓特征,确定所述智能设备的第一位姿,并构建所述智能设备所处环境的环境地图。
10、在一种可能的实施方式中,特征点属于轮廓点。
11、在一种可能的实施方式中,该装置还包括:特征处理模块,用于确定进行深度赋值后的若干轮廓特征各自的描述信息;存储处理模块,用于存储与视觉图像对应的关键帧和特征信息,关键帧包括进行深度赋值后的若干轮廓特征,特征信息包括进行深度赋值后的若干轮廓特征各自的描述信息。
12、在一种可能的实施方式中,该装置还包括:查询处理模块,用于根据已存储的多个关键帧各自的特征信息、进行深度赋值后的若干轮廓特征以及其各自的描述信息,从多个关键帧确定与视觉图像相似的相似帧;位姿确定模块,用于根据相似帧和进行深度赋值后的若干轮廓特征,确定智能设备的第二位姿;地图优化模块,用于在智能设备的第二位姿合理的情况下,根据进行深度赋值后的若干轮廓特征优化已建立的环境地图。
13、在一种可能的实施方式中,轮廓特征的描述信息包括如下各项信息中的至少一项:轮廓类型、轮廓主轴方向以及轮廓面积。
14、在一种可能的实施方式中,定位构图模块,具体用于根据特征点、进行深度赋值后的若干轮廓特征以及预先配置的距离约束,构建智能合约所处环境的环境地图,其中距离约束指示属于轮廓特征的像素点与对应的目标轮廓特征间的距离需满足的条件,目标轮廓特征位于环境地图中。
15、第三方面,本技术提供一种计算设备,包括:至少一个存储器,用于存储程序;至少一个处理器,用于执行存储器存储的程序;其中,当存储器存储的程序被执行时,处理器用于执行第一方面或第一方面的任一种可能的实施方式所描述的方法。
16、第四方面,本技术提供一种计算设备集群,包括至少一个计算设备,每个计算设备均包括处理器和存储器;所述至少一个计算设备的处理器用于执行所述至少一个计算设备的存储器中存储的指令,以使得所述计算设备集群执行第一方面或第一方面的任一种可能的实施方式所描述的方法。
17、第五方面,本技术提供一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,当计算机程序在处理器上运行时,使得处理器执行第一方面或第一方面的任一种可能的实施方式所描述的方法。
18、第六方面,本技术提供一种计算机程序产品,当计算机程序产品在处理器上运行时,使得处理器执行第一方面或第一方面的任一种可能的实施方式所描述的方法。
19、可以理解的是,前述第二方面至第六方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!