一种基于Yolov5算法分割极片待检测区域的方法与流程
本发明涉及电芯检测,具体为一种基于yolov5算法分割极片待检测区域的方法。
背景技术:
1、随着国家政策的支持,消费水平的提高,以及人们环保意识的提升,以锂离子电池作为动力的电动汽车已开始被广泛使用,电动汽车的动力电池组由单个电池组成,单个电池又由若干电芯极组组成,每个电池的电芯极组在生产过程时,需要检测电芯极组中各极片的状态是否符合工艺标准,在进行对齐度数值计算时,真实有效区域集中在阴阳极固定区域,为避免其他区域干扰,以及提升算法运算效率,需要对待检测区域准确分割出来。
技术实现思路
1、本发明提供的发明目的在于提供一种基于yolov5算法分割极片待检测区域的方法。通过本发明一种基于yolov5算法分割极片待检测区域的方法,为了解决电池生产过程中,常规算法无法精准定位分割出待检测区域,使用传统算法制作数据集,减少人工标注工作,通过ai算法精准识别出不规则、多形态的待检测区域,保证后续极片对齐度计算的准确性,最快速度检测电芯极组中各极片的状态是否符合工艺标准,以及对齐度数值计算,真实有效区域集中在阴阳极固定区域,避免其他区域干扰,以及提升算法运算效率。
2、为了实现上述效果,本发明提供如下技术方案:一种基于yolov5算法分割极片待检测区域的方法,包括以下步骤:
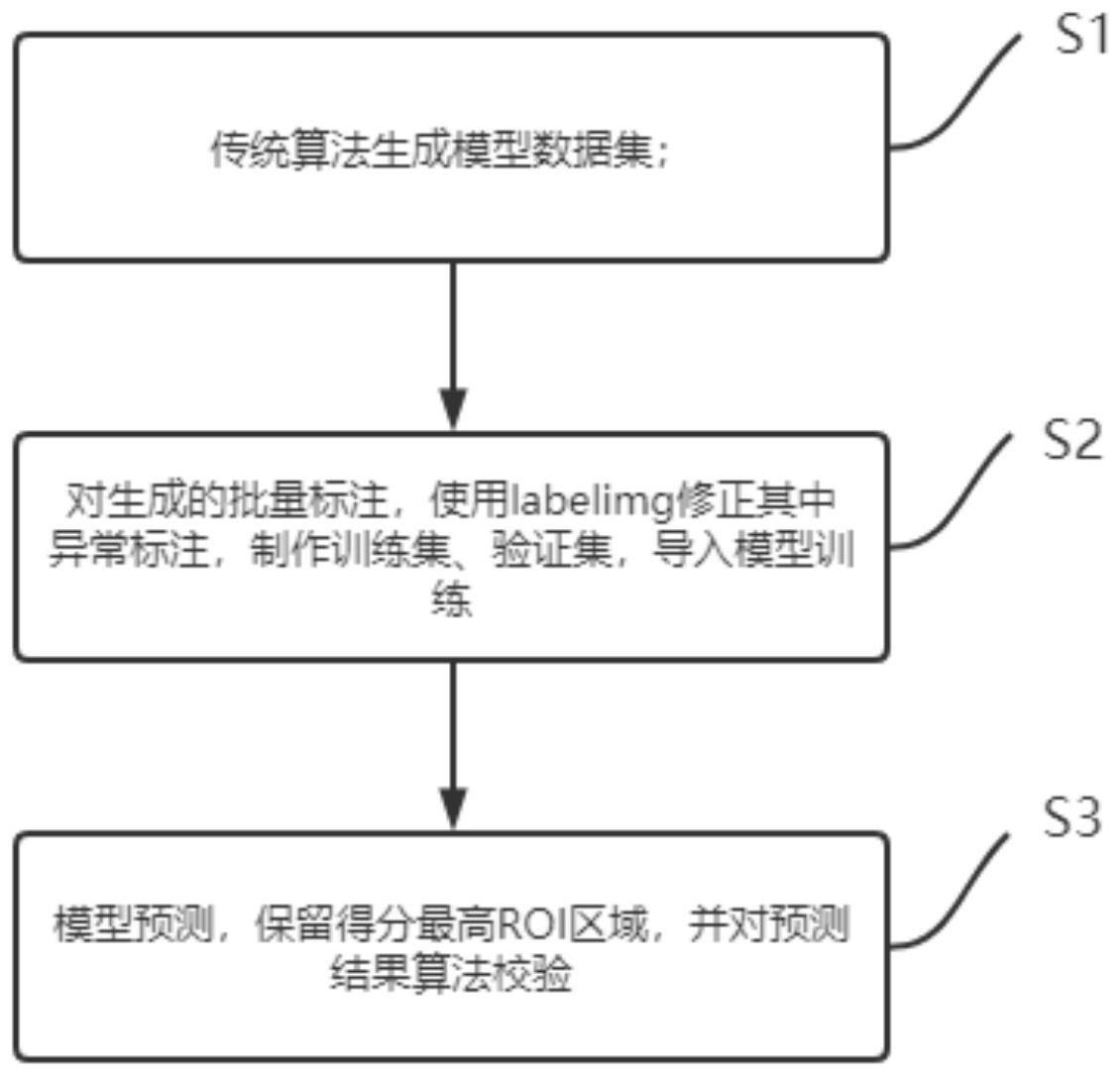
3、s1、传统算法生成模型数据集。
4、s2、对生成的批量标注,使用labelimg修正其中异常标注,制作训练集、验证集,导入模型训练。
5、s3、模型预测,保留得分最高roi区域,并对预测结果算法校验。
6、进一步的,包括以下步骤:根据s1中的操作步骤,
7、s101、明确待检测区域与样本集的收集。
8、s102、图像收集:使用x-ray光+tdi线扫相机的方案对电芯极组四个角进行成像。
9、s103、传统算法制作标注文件,选择成像效果达标的图像作为模板图像,对图像切割获得目标区域的模板,导入批量图像(10000+)使用cv2.matchtemplate进行模板匹配,获得结果矩阵,使用cv2.minmaxloc来查找结果矩阵的最大元素所在位置,根据所得min_loc/maxloc数值获得起点坐((startx,starty),加入所要切割区域宽w:600、高h:300,计算出矩形的左上角(xmin,ymin)、右下角坐((ymin,ymax),并且结合所要做的分类类别battery与当前图像位置信息,将区域信息写入xml格式文件,循环制作出大批量图像对应的xml文件,通用算法形成批量数据集。
10、进一步的,包括以下步骤:根据s2中的操作步骤,
11、s201、数据集校正。
12、s202、制作训练集、验证集。
13、s203、模型训练。
14、s204、训练过程得分展示。
15、进一步的,包括以下步骤:根据s203中的操作步骤,
16、s2031、分类定为一个类型:battery。
17、s2032、设置图片训练尺寸:640*640(原图尺寸1600*1600,统一对图像resize为640*640),加载权重文件:yolov5s.pt。
18、s2033、载入分类类别:battery,先验框参数:[10,13,16,30,33,23][30,61,62,45,59,119][116,90,156,198,373,326],此处的先验框参数,可根据具体场景,使用k-means算法在训练集中所有样本的ground truth box中聚类得出。
19、s2034、训练模型核心参数设置。
20、进一步的,包括以下步骤:根据s3中的操作步骤,
21、s301、加载模型,使用torch.load加载已训练完成的模型文件best.pt。
22、s302、载图像,使用cv2.imread读取指定目录下的图像。此处注意,当前检测产品为极组,一个极组对应四张图片,四张图片成像的朝向不一样,因此增加读图后旋转cv2.getrotationmatrix2d,统一方向。
23、s303、将要检测的图像传入训练完成的模型。
24、s304、获得模型的预测结果后进行解码操作。
25、s305、解码后将预测框堆叠,进行非极大抑制(non-maximum suppression,nms),刷选出一定区域内得分最大的方框。
26、s306、在本场景中,一张图像待检测只有一个,因此对结果的阈值得分进行对比,保留得分最高区域为待检测区域。
27、s307、输出调整后的预测框,包括预测框矩形的xy坐标,宽高,置信值,以及分类类别(battery)。
28、s308、使用draw.rectangle绘制出边界框(待检测区域框出显示),使用。
29、s309、预测结果校验:对算法模型生成的区域进行验证。
30、s310、将图像处理结果与待检测区域图像分类保存至本地。
31、s311、模型核心参数设置。
32、s312、算法评价。
33、进一步的,包括以下步骤:根据s309中的操作步骤,所述算法模型生成的区域进行验证,待检测区域上方、左侧、右侧三处生成矩形边框。
34、进一步的,包括以下步骤:根据s309中的操作步骤,所述传统算法提取三个矩形边框内灰度值,待检测区域旁边空间无极片,成像呈白色(灰度值〉230),即内部出现像素点灰度值≤230且像素数量大于15,即判定待检测区域提取异常。
35、进一步的,包括以下步骤:根据s311中的操作步骤,所述模型核心参数设置:
36、model(weights='weights/best.pt'
37、img-size=[640,640]
38、conf-thres=0.8
39、iou-thres=0.45
40、device=0,1,2。
41、进一步的,包括以下步骤:根据s312中的操作步骤,所述算法评价根据准确率、目标与实际提取准确度进行检测。
42、进一步的,包括以下步骤:根据s311中的操作步骤,所述weights:训练的权重,batch_size:每个batch包含的样本数量,epoch:一个epoch就是将所有训练样本训练一次的过程,device:设置设备,根据选择调用cpu/gpu,img-size:网络输入图片大小,confidence:置信度,框出的box内确实有物体的自信程度和框出的box将整个物体的所有特征都包括进来的自信程度,iou:交并比(intersection over union),iou计算的是“预测的边框”和“真实的边框”的交集和并集的比值。
43、本发明提供了一种基于yolov5算法分割极片待检测区域的方法,具备以下有益效果:该基于yolov5算法分割极片待检测区域的方法,为了解决电池生产过程中,常规算法无法精准定位分割出待检测区域,使用传统算法制作数据集,减少人工标注工作,通过ai算法精准识别出不规则、多形态的待检测区域,保证后续极片对齐度计算的准确性,最快速度检测电芯极组中各极片的状态是否符合工艺标准,以及对齐度数值计算,真实有效区域集中在阴阳极固定区域,避免其他区域干扰,以及提升算法运算效率。
- 还没有人留言评论。精彩留言会获得点赞!