空气质量格点化集合预报的方法及装置与流程
1.本技术涉及空气质量预报技术领域,尤其涉及一种空气质量格点化集合预报的方法及装置。
背景技术:
2.日益严峻的空气污染增加了健康风险。合理的空气质量预报能够帮助相关部门做出决策,以限制人为污染物的排放量,引导公众规避污染峰值期,减少暴露时间。空气质量的数值模式能模拟污染物的物理和化学反应过程,并能给出具有物理意义的四维污染物浓度时空特征,已经成为短时临近和中期空气质量预报的主要手段。但由于气象场的不确定性、模式本身物理过程和参数化方案的缺陷、以及排放源的不准确,这使得数值模式预报的污染物浓度仍存在偏差,从而极大地限制了单个数值模式输出结果在业务领域的应用。为减少数值模式偏差对预报准确率影响,常用方法之一是多模式集合预报。虽然多模式集合预报能够较好地模拟出主要污染物的日变化趋势,但多模式集合预报主要针对地面站点监测数据开展集合算法,只具有单站点预报属性,无法提供全空间预报结果,而预报员更希望获取水平空间甚至三维立体的优化预报结果,因此,格点化集合预报具有较大的市场需求和应用价值。
3.相关技术中,通过在建立站点集合预报的基础上,采用插值法得到格点预报场,从而实现格点化集合预报。
4.基于上述通过插值法得到的格点预报场存在偏差,从而使得格点化集合预报的准确率仍较低。
技术实现要素:
5.本技术提供一种空气质量格点化集合预报的方法及装置,用以提高格点化集合预报的准确率。
6.第一方面,本技术实施例提供一种空气质量格点化集合预报的方法,包括:获取预报区域内站点对应的多模式集合预报数据,该多模式集合预报数据包括多种污染物预报浓度;对多模式集合预报数据进行预处理,得到目标站点集合预报数据;采用大气污染物同化系统,对目标站点集合预报数据和第一数值模式数据进行融合处理,得到预报区域对应的格点化集合预报数据,该大气污染物同化系统中的同化参数是基于三维变分同化方法确定的,第一数值模式数据为预报区域内所有网格对应的单模式数据经预处理后得到的数据集合。
7.一种可能的实现方式中,对多模式集合预报数据进行预处理,得到目标站点集合预报数据,包括:获取预报区域内站点的站点数据,该站点数据包括站点号、站点经度和站点纬度;调整多模式集合预报数据和站点数据的格式,得到目标站点集合预报数据。
8.一种可能的实现方式中,获取预报区域内站点对应的多模式集合预报数据,包括:获取预报区域内站点对应的至少一个单模式预报结果,该单模式预报结果包括多种污染物
预报浓度;获取站点的监测数据,该监测数据包括多种污染物浓度;利用集合预报方法,根据站点的监测数据和单模式预报结果,得到预报区域内站点对应的多模式集合预报数据。
9.一种可能的实现方式中,采用大气污染物同化系统,对目标站点集合预报数据和第一数值模式数据进行融合处理,得到预报区域对应的格点化集合预报数据之前,还包括:获取预报区域内所有网格对应的单模式数据;调整单模式数据的格式,得到第一数值模式数据。
10.一种可能的实现方式中,大气污染物同化系统是根据以下方法获得的:利用三维变分同化法调试同化模式中的同化参数,得到不同的同化参数对应的污染物同化效果;根据污染物同化效果,选取优化后的同化参数;根据优化后的同化参数,得到基于三维变分同化方法的大气污染物同化系统。
11.一种可能的实现方式中,根据污染物同化效果,选取优化后的同化参数,包括:根据污染物同化效果和站点监测到的数据,得到污染物同化效果中的最优同化效果;确定最优同化效果对应的同化参数为优化后的同化参数。
12.一种可能的实现方式中,一种空气质量格点化集合预报的方法,还包括:根据格点化集合预报数据和第二数值模式数据,生成格点化融合分析预报数据,第二数值模式数据为预报区域内所有网格对应的气象数据和污染物数据。
13.第二方面,本技术提供一种空气质量格点化集合预报的装置,包括:获取模块,用于获取预报区域内站点对应的多模式集合预报数据,该多模式集合预报数据包括多种污染物预报浓度;预处理模块,用于对多模式集合预报数据进行预处理,得到目标站点集合预报数据;融合模块,用于采用大气污染物同化系统,对目标站点集合预报数据和第一数值模式数据进行融合处理,得到预报区域对应的格点化集合预报数据,该大气污染物同化系统中的同化参数是基于三维变分同化方法确定的,第一数值模式数据为预报区域内所有网格对应的单模式数据经预处理后得到的数据集合。
14.一种可能的实现方式中,预处理模块具体用于:获取预报区域内站点的站点数据,该站点数据包括站点号、站点经度和站点纬度;调整多模式集合预报数据和站点数据的格式,得到目标站点集合预报数据。
15.一种可能的实现方式中,获取模块具体用于:获取预报区域内站点对应的至少一个单模式预报结果,该单模式预报结果包括多种污染物预报浓度;获取站点的监测数据,该监测数据包括多种污染物浓度;利用集合预报方法,根据站点的监测数据和单模式预报结果,得到预报区域内站点对应的多模式集合预报数据。
16.一种可能的实现方式中,融合模块具体用于:获取预报区域内所有网格对应的单模式数据;调整单模式数据的格式,得到第一数值模式数据。
17.一种可能的实现方式中,还包括获得模块,该获得模块用于:利用三维变分同化法调试同化模式中的同化参数,得到不同的同化参数对应的污染物同化效果;根据污染物同化效果,选取优化后的同化参数;根据优化后的同化参数,得到基于三维变分同化方法的大气污染物同化系统。
18.一种可能的实现方式中,获得模块具体用于:根据污染物同化效果和站点监测到的数据,得到污染物同化效果中的最优同化效果;确定最优同化效果对应的同化参数为优化后的同化参数。
19.一种可能的实现方式中,还包括生成模块,该生成模块用于:根据格点化集合预报数据和第二数值模式数据,生成格点化融合分析预报数据,第二数值模式数据为预报区域内所有网格对应的气象数据和污染物数据。
20.第三方面,本技术提供一种电子设备,包括:至少一个处理器;以及与至少一个处理器连接的存储器;其中,存储器用于存储计算机执行指令,该计算机执行指令被至少一个处理器执行,以使至少一个处理器能够执行第一方面提供的空气质量格点化集合预报的方法。
21.第四方面,本技术提供一种计算机可读存储介质,该计算机可读存储介质中存储有计算机执行指令,计算机执行指令被执行时用于实现第一方面提供的空气质量格点化集合预报的方法。
22.第五方面,本技术提供一种程序产品,该程序产品包含计算机执行指令。当计算机执行指令被执行时,以实现第一方面提供的空气质量格点化集合预报的方法。
23.本技术提供的空气质量格点化集合预报的方法及装置,通过基于三维变分同化方法建立大气污染同化系统,并利用该大气污染同化系统将目标站点集合预报数据和第一数值模式数据进行融合,得到格点化集合预报数据。提高了格点化集合预报的准确率。
附图说明
24.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本技术的实施例,并与说明书一起用于解释本技术的原理。
25.图1为本技术实施例提供的预报区域的地形示意图;图2为本技术实施例一提供的空气质量格点化集合预报的方法的流程图;图3为本技术实施例二提供的空气质量格点化集合预报的方法的流程图;图4为本技术实施例三提供的空气质量格点化集合预报的方法的流程图;图5为本技术实施例四提供的大气污染物同化系统获得方法的流程图;图6为本技术实施例五提供的空气质量格点化集合预报的装置的结构示意图;图7为本技术实施例六提供的电子设备的结构示意图。
26.通过上述附图,已示出本技术明确的实施例,后文中将有更详细的描述。这些附图和文字描述并不是为了通过任何方式限制本技术构思的范围,而是通过参考特定实施例为本领域技术人员说明本技术的概念。
具体实施方式
27.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本技术相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本技术的一些方面相一致的装置和方法的例子。
28.虽然空气质量模式的准确率在近些年得到了较大的提高,但是模式对某个站点的预报仍然存在一定的误差,其主要来源是气象场的不确定性、模式本身物理过程和参数化方案的缺陷、以及排放源的不准确,这极大地限制了单个模式输出结果在业务领域的应用。多模式集合预报是减少数值模式偏差对预报准确率的影响的常用方法之一。多模式集合预
报方法在天气业务预报中已得到广泛应用,相关技术中,通过试验发现多模式集合预报的效果明显优于单模式的效果。同时还通过多个数值模型对上海市的空气质量进行多模式集合预报,发现多模式集合预报能够较好地模拟出主要污染物的日变化趋势。
29.由于多模式集合预报主要针对地面站点监测数据开展集合算法,只具有单站点预报属性,无法提供全空间预报结果。目前,仅有科研层面采用分区域站点空间相关法来实现格点化的集合预报,业务上仍然没有格点化的集合预报产品。而预报员更希望获取水平空间甚至三维立体的优化预报结果,因此格点化集合预报具有较大的市场需求和应用价值。目前,相关技术中对于格点化集合预报的获取有两种常用的方法。一种方式中,通过先建立站点集合预报,然后划定站点影响区域,在该区域内的格点均采用此站点集合预报。根据该方法划分得到的站点影响区域如果不够精细或合理,会使得站点代表的区域格点出现集合偏差,不同区域边界上存在不连续的现象。另一种方式,通过先建立站点集合预报,然后采用插值法得到格点预报场。根据该方法得到的格点预报场可能存在不连续的现象,需要做平滑处理,由于未考虑水陆差别、市区与郊区的差别,使得格点集合可能存在偏差。综上所述,相关技术的方法均会使得格点化集合预报的准确率仍较低。
30.基于上述问题,本技术实施例通过基于三维变分同化方法建立了大气污染同化系统,并通过该大气污染同化系统对站点集合预报数据和格点的单模式数据进行融合处理,得到了格点集合预报数据。该方法提高了格点集合预报的准确率。
31.为了便于理解,首先对本技术实施例的应用场景进行介绍。
32.图1为本技术实施例提供的预报区域的地形示意图。如图1所示,101为预报区域的地形图,其中,黑色圆点表示空气质量监测站。
33.目前,为了提高空气质量的预报准确率,在多模式站点集合预报的基础上提出了格点化集合预报,即将一个地区按一定的规则划分为无数个大小相同的网格,用于得到该网格内的空气质量的预报结果。同时,格点化集合预报也可以提高预报的频次,方便公众获取不同时间段内的预报结果。本技术中,将包含有空气质量监测站的网格称为站点。每个网格内至少包括一个数值模式,本技术实施例对每个网格内所包含的数值模式的个数不做限定。示例性的,数值模式可以为中国科学院大气物理研究所开发的嵌套网格空气质量预报模式系统(nested air quality prediction model system,简称naqpms)、美国环保署的空气质量预报模式系统(community multiscale air quality modeling system,简称cmaq)、美国environ公司的空气质量综合模拟系统(comprehensive air quality model,简称 camx)、美国大气海洋局(national oceanic and atmospheric administration,简称noaa)预报系统实验室(forecast systems laboratory,简称fsl)开发的区域空气质量模式(weather research forecast,简称wrf-chem)中的一种或多种。具体的,数值模式用于提供各嵌套区域各时效预报的大气污染物的质量浓度。示例性的,大气污染物的类型包括pm2.5、pm10、so2、no2、co和o3等。
34.本技术实施例通过利用基于三维变分同化方法建立的大气污染同化系统,对站点集合预报数据和格点的数值模式数据进行处理,得到格点集合预报数据,进一步得到目标预报区域内的预报结果,提高了格点化集合预报的准确率。
35.下面结合图1对本技术实施例提供的空气质量格点化集合预报的处理方法进行详细说明。其中,所涉及的格点和站点均为图1中所述的格点和站点。
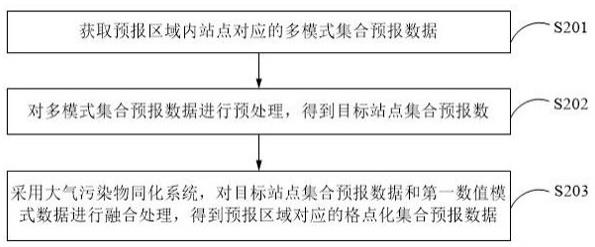
36.图2为本技术实施例一提供的空气质量格点化集合预报的方法的流程图。如图2所示,该空气质量格点化集合预报的方法具体包括以下步骤:s201,获取预报区域内站点对应的多模式集合预报数据。
37.多模式集合预报即多数值模式集合预报,是将多个数值模式的预报结果按一定的规则进行融合的一种气象预报技术。多模式集合预报数据包括预报区域内站点的各污染物的集合预报浓度。示例性的,污染物的类型可以包括pm2.5、pm10、so2、no2、co和o3,等等。
38.一个站点内包含至少一个数值模式,具体的,数值模式的类型可以为如上所述的任意一种或多种。可以理解的是,本技术实施例提供的数值模式可以包括上述数值模式中的一种或多种,但不限于上述提供的数值模式。
39.数值模式即通过数学程序表达大气中的状况,将大气的信息通过数学程序进行处理,得到数值模式的预报结果。示例性的,大气信息可以为气象场的信息和\或排放信息。具体的,气象场的信息可以为风速、空气湿度、空气温度、气压以及降水量等;排放信息可以为各个企业的污染物排放种类及排放量。可以理解的是,大气信息包括但不限于本技术实施例所提到的,基于上述提供的每一种数值模式的数据包括但不限于pm2.5、pm10、so2、no2、co和o3等各污染物的质量浓度。
40.s202,对多模式集合预报数据进行预处理,得到目标站点集合预报数据。
41.对多模式集合预报数据进行预处理,即对对模式集合预报数据的格式进行变更。
42.目标站点集合预报数据为预报区域内所有站点的集合预报数据的数据集合,具体的,包括每个站点对应的多模式集合预报数据和站点数据。其中,站点数据包括站点号、站点经度和站点纬度。
43.s203,采用大气污染物同化系统,对目标站点集合预报数据和第一数值模式数据进行融合处理,得到预报区域对应的格点化集合预报数据。
44.大气污染同化系统是基于三维变分同化方法确定的。具体的,大气污染同化系统的同化参数是基于三维变分同化方法确定的。该大气污染同化系统包括但不限于同化模式,数据处理模式以及运行模式等。
45.第一数值模式数据为预报区域内所有网格对应的单模式数据经预处理后得到的数据集合。示例性的,每个网格内包含的数值模式可以为单模式,也可以为多模式。一种可能的实现方式中,首先分别获取预报区域内每个网格的单模式数据,调整单模式数据的格式,得到第一数值模式数据,并将该第一数值模式数据作为大气污染同化系统中同化模式的输入数据。具体的,单模式数据的格式可以调整为netcdf格式。示例性的,单模式数据包括pm2.5、pm10、so2、no2、co和o3的质量浓度。其中,对于包含有多个数值模式的网格,一种可能的实现方式中,可以随机选取其中的一个单模式数据用于得到第一数值模式数据。另一种可能的实现方式中,也可以计算该网格内包含的多模式数据的平均值,并将该平均值数据用于得到第一数值模式数据。
46.单模式数据的获取方法,一种可能的实现方式中,通过将气象场信息和排放信息输入到数值模式中,数值模式通过多输入的气象信息和排放信息进行模拟污染物的物理和化学反应过程,得到上述预报区域内每一个网格对应的单模式数据中各污染物的质量浓度。具体的,该单模式包括但不限于上述提到的数值模式中的任意一种。可以理解的是,单模式即指一个数值模式。
47.将目标站点集合预报数据和第一数值模式数据输入到大气污染同化系统中,通过大气污染同化系统对目标站点集合预报数据和第一数值模式数据的融合处理,得到预报区域对应的格点化集合预报数据。示例性的,格点化集合预报数据包括pm2.5、pm10、so2、no2、co和o3各污染物的质量浓度。
48.一种可能的实现方式中,根据格点化集合预报数据和第二数值模式数据,生成格点化融合分析预报数据。具体的,将格点化集合预报数据和第二数值模式数据输入大气污染同化系统中进行融合处理,得到格点化大数据融合分析预报数据。示例性的,第二数值模式数据为预报区域内所有网格对应的气象数据和污染物数据。具体的,该污染物数据可以包括各种污染物浓度、颗粒物组分以及挥发性有机化合物组分。
49.可以理解的是,对于任意一个预报区域内的格点化集合预报数据均可以通过上述方法获取。
50.本实施例中,通过获取预报区域内站点对应的多模式集合预报数据;对多模式集合预报数据进行预处理,得到目标站点集合预报数据;采用大气污染物同化系统,对目标站点集合预报数据和第一数值模式数据进行融合处理,得到所预报区域对应的格点化集合预报数据。该方法利用基于三维变分同化方法获得的大气污染同化系统,通过目标站点集合预报数据和预报区域内所有网格对应的单模式数据得到预报区域内的格点化集合预报数据,提高了格点化集合预报的准确率。
51.图3为本技术实施例二提供的空气质量格点化集合预报的方法的流程图。本实施例是对实施例一中步骤s202的详细介绍。如图3所示,该空气质量格点化集合预报的方法中,对多模式集合预报数据进行预处理,得到目标站点集合预报数据,可以包括以下步骤:s301,获取预报区域内站点的站点数据。
52.站点数据包括站点号、站点经度和站点纬度。其中,站点号可以是人为标定的。
53.s302,调整多模式集合预报数据和站点数据的格式,得到目标站点集合预报数据。
54.多模式集合预报数据包括pm2.5、pm10、so2、no2、co和o3的质量浓度。将预报区域内所有站点对应的多模式集合预报数据和站点数据的格式调整为大气污染同化系统中同化模式的输入数据格式,即目标站点集合预报数据。示例性的,大气污染同化系统中同化模式的输入数据格式可以为bufr格式。
55.本实施例中,通过获取预报区域内站点的站点数据,调整多模式集合预报数据和站点数据的格式,得到目标站点集合预报数据。该方法对同化前站点集合预报数据和站点数据进行了处理,方便输入大气污染同化系统进行处理,进一步得到格点集合预报数据,提高格点集合预报的准确率。
56.图4为本技术实施例三提供的空气质量格点化集合预报的方法的流程图。本实施例是对实施例一中步骤s201的详细介绍。如图4所示,该空气质量格点化集合预报的方法中,获取预报区域内站点对应的多模式集合预报数据,可以包括以下步骤:s401,获取预报区域内站点对应的至少一个单模式预报结果,该单模式预报结果包括多种污染物预报浓度。
57.一个站点内可以包括多个数值模式,分别获取站点内每个数值模式的预报结果。示例性的,该单模式可以为上述提供的数值模式的一个或多个。
58.单模式预报结果包括各种污染物预报浓度,示例性的,污染物类型包括pm2.5、
pm10、so2、no2、co和o3。具体的,每个数值模式中污染物浓度的获取方法与步骤s203中所述的方法类似,这里不在赘述。
59.s402,获取站点的监测数据,该监测数据包括多种污染物浓度。
60.站点的监测数据为站点内空气质量监测站实时获取的,监测数据中污染物的类型包括pm2.5、pm10、so2、no2、co和o3,与数值模式中得到的污染物类型相同。
61.s403,利用集合预报方法,根据站点的监测数据和单模式预报结果,得到预报区域内站点对应的多模式集合预报数据。
62.一种可能的实现方式中,通过对比站点监测数据和单模式数据的近似度确定各单模式预报结果所占的权重。根据各单模式的权重计算站点内所有单模式的加权平均值,并将该加权平均值作为多模式的集合预报数据。
63.另一种可能的实现方式中,通过对比站点监测数据和单模式数据的近似度,确定各单模式预报结果所占的权重,将权重系数低于阈值的单模式数据去掉,将剩余部分的多个单模式数据进行加权平均值的计算,并将计算得到的加权平均值作为多模式集合预报的数据。示例性的,阈值可以为0.1、0.2以及0.3等。
64.可以理解的是,本实施例提供的对预报区域内一个站点多模式集合预报数据的获取方法,对于其他站点多模式集合预报数据的获取也是适用的。
65.本实施例中,通过获取预报区域内站点对应的至少一个单模式预报结果和站点的监测数据,利用利用集合预报方法,根据站点的监测数据和单模式预报结果,得到预报区域内站点对应的多模式集合预报数据。该方法确保了站点多模式集合预报数据结果的准确性。
66.图5为本技术实施例四提供的大气污染物同化系统获得方法的流程图。如图5所示,该大气污染物同化系统的获得方法具体包括以下步骤:s501,利用三维变分同化法调试同化模式中的同化参数,得到不同的同化参数对应的污染物同化效果。
67.三维变分是一种利用变分思想将数据同化问题转化为一个极值求解问题的方法。在满足动态约束的条件下,最小化状态预测值与观测值之间的距离,使这种“距离”最小的状态量即为最优状态估计量。
68.可选的,同化模式可以为gsi(gridpoint statistical interpolation,简称gsi)同化模式。
69.在三维变分的基础上,根据中国空气质量污染特征,本地化背景误差协方差矩阵和观测误差矩阵,调试gsi同化模式中的同化参数,并记录不同的同化参数对应的污染物同化效果。具体的,污染物同化效果即为不同的同化参数下得到的污染物的浓度数据。
70.s502,根据污染物同化效果,选取优化后的同化参数。
71.一种可能的实现方式中,根据污染物同化效果和站点监测到的数据,得到污染物同化效果中的最优同化效果,确定最优同化效果对应的同化参数为优化后的同化参数。具体的,将不同同化参数下对应的污染物同化效果与站点监测到的数据进行对比,选取与站点监测到的数据最接近的污染物同化效果对应的同化参数为优化后的同化参数。
72.s503,根据优化后的同化参数,得到基于三维变分同化方法的大气污染物同化系统。
73.将优化后的同化参数设置为gsi同化模式的同化参数,建立基于三维变分同化方法的大气污染物同化系统。
74.本实施例中,通过利用三维变分同化法调试同化模式中的同化参数,得到不同的同化参数对应的污染物同化效果,进一步根据污染物同化效果得到优化后的同化参数,并建立基于三维变分同化方法的大气污染物同化系统。该方法在三维变分同化方法的基础上建立了大气污染同化系统,使得污染物同化效果达到了最优。
75.图6本技术实施例五提供的空气质量格点化集合预报的装置的结构示意图。如图6所示,该空气质量格点化集合预报的装置60包括:获取模块610、预处理模块620和融合模块630。
76.其中,获取模块610,用于获取预报区域内站点对应的多模式集合预报数据,该多模式集合预报数据包括多种污染物预报浓度;预处理模块620,用于对多模式集合预报数据进行预处理,得到目标站点集合预报数据;融合模块630,用于采用大气污染物同化系统,对目标站点集合预报数据和第一数值模式数据进行融合处理,得到预报区域对应的格点化集合预报数据,该大气污染物同化系统中的同化参数是基于三维变分同化方法确定的,第一数值模式数据为预报区域内所有网格对应的单模式数据经预处理后得到的数据集合。
77.一种可能的实现方式中,预处理模块620具体用于:获取预报区域内站点的站点数据,该站点数据包括站点号、站点经度和站点纬度;调整多模式集合预报数据和站点数据的格式,得到目标站点集合预报数据。
78.一种可能的实现方式中,获取模块610具体用于:获取预报区域内站点对应的至少一个单模式预报结果,该单模式预报结果包括多种污染物预报浓度;获取站点的监测数据,该监测数据包括多种污染物浓度;利用集合预报方法,根据站点的监测数据和单模式预报结果,得到预报区域内站点对应的多模式集合预报数据。
79.一种可能的实现方式中,融合模块630具体用于:获取预报区域内所有网格对应的单模式数据;调整单模式数据的格式,得到第一数值模式数据。
80.一种可能的实现方式中,还包括获得模块(未图示),该获得模块用于:利用三维变分同化法调试同化模式中的同化参数,得到不同的同化参数对应的污染物同化效果;根据污染物同化效果,选取优化后的同化参数;根据优化后的同化参数,得到基于三维变分同化方法的大气污染物同化系统。
81.一种可能的实现方式中,获得模块具体用于:根据污染物同化效果和站点监测到的数据,得到污染物同化效果中的最优同化效果;确定最优同化效果对应的同化参数为优化后的同化参数。
82.一种可能的实现方式中,还包括生成模块(未图示),该生成模块用于:根据格点化集合预报数据和第二数值模式数据,生成格点化融合分析预报数据,第二数值模式数据为预报区域内所有网格对应的气象数据和污染物数据。
83.本实施例提供的空气质量格点化集合预报的装置可用于执行上述方法实施例的方法步骤,具体实现方式和技术效果类似,这里不再赘述。
84.图7为本技术实施例六提供的电子设备的结构示意图。如图7所示,该电子设备70,包括:至少一个处理器701;以及与至少一个处理器701通信连接的存储器702。
85.其中,存储器702用于存储计算机执行指令,该计算机执行指令被至少一个处理器
701执行,以使至少一个处理器701能够执行上述的方法实施例中的方法步骤。
86.处理器701的具体实现过程可参见上述方法实施例,具体实现方式和技术效果类似,这里不再赘述。
87.本技术实施例还提供一种计算机可读存储介质,计算机可读存储介质中存储有计算机执行指令,计算机执行指令被处理器执行时用于实现如上述方法实施例中的方法步骤,具体实现方式和技术效果类似,这里不再赘述。
88.本技术实施例还提供一种程序产品,该程序产品包含计算机执行指令。当计算机执行指令被执行时,以实现如上述方法实施例中的方法步骤,具体实现方式和技术效果类似,这里不再赘述。
89.本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到发明的其它实施方案。本技术旨在涵盖本技术的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本技术的一般性原理并包括本技术未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本技术的真正范围和精神由下面的权利要求书指出。
90.应当理解的是,本技术并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本技术的范围仅由所附的权利要求书来限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1