基于多尺度图像的瞳孔定位方法及装置与流程
本发明涉及图像处理领域,特别是涉及一种基于多尺度图像的瞳孔定位方法及装置。
背景技术:
1、随着近视人群数量的提升,根据统计数据显示,我国近视人数已经超过6亿,青少年近视率已经高居世界第一。因此相应的,视光测量仪器变得越来越重要,测量屈光度与眼轴长度对近视的预防以及眼视力屈光问题的及早发现有着重要意义,也为后续的激光屈光手术做检查辅助。
2、瞳孔是虹膜围成的孔隙,是人眼光学系统的重要组成部分,其主要功能是通过改变大小,维持不同照明环境下进入眼底光线的稳定,此外,瞳孔大小对眼睛成像的焦深以及全眼像差也有很大的影响。进行屈光度测量的过程中,需要医生或者操作人员通过手动方式或者自动方式将仪器对准瞳孔区域。自动方式需要进行瞳孔定位来告知移动平台如何将仪器进行移动对准瞳孔,实时定位瞳孔的位置,检测是否发生背向。手动方式也需要进行瞳孔定位来辅助操作人员移动仪器对准瞳孔,如果瞳孔发生背向,可以提醒操作人员。对于婴幼儿和配合度不好人群,就更需要对瞳孔进行实时定位,针对各种情况进行操作,避免影响测量结果。除此之外,在激光屈光手术中,角膜切削中心的定位和保持是至关重要的,激光屈光手术中,为了便于操作,需要实时跟踪眼球,跟踪过程中就需要能够对瞳孔进行准确快速的定位。
3、考虑到实际场景中成像环境是复杂多样的,比如会出现眼睫毛遮挡眼睛或者眼睛半闭,人头部的移动或者眼球的眼动反应,也会导致成像变得模糊。因此,提供一种能够在各种复杂条件下应用,能够定位出瞳孔的方法,就具有非常重要的意义。
技术实现思路
1、本发明的目的是提供一种基于多尺度图像的瞳孔定位方法及装置,能够定位到瞳孔,能够在各种复杂条件下应用。
2、为实现上述目的,本发明提供如下技术方案:
3、一种基于多尺度图像的瞳孔定位方法,包括:
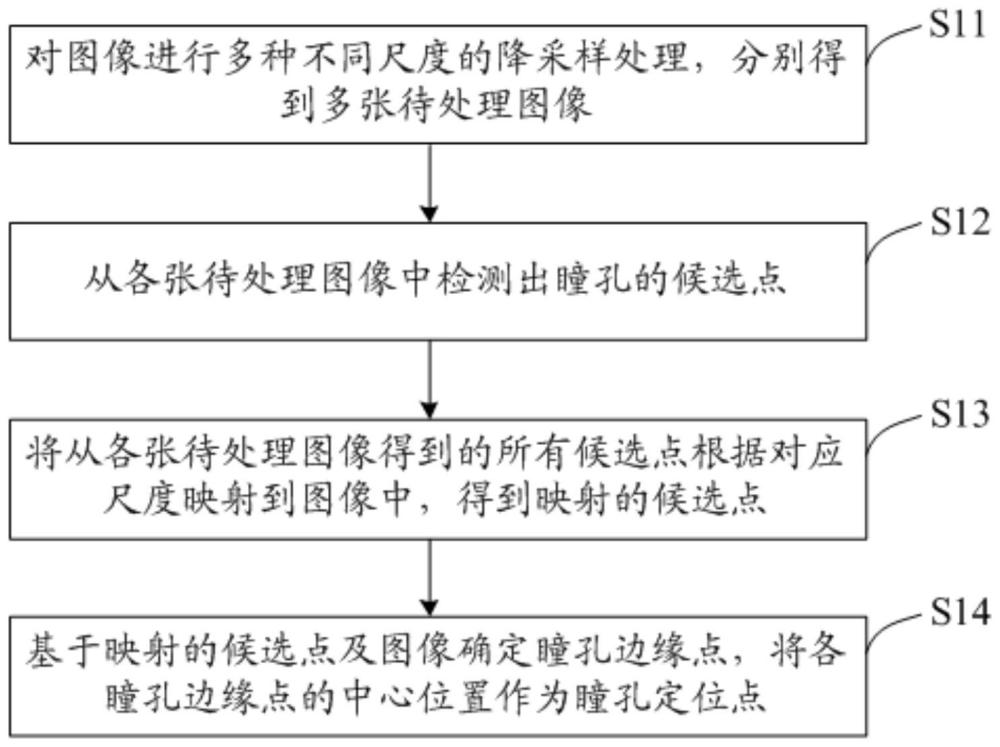
4、对图像进行多种不同尺度的降采样处理,分别得到多张待处理图像;
5、从各张所述待处理图像中检测出瞳孔的候选点;
6、将从各张所述待处理图像得到的所有候选点根据对应尺度映射到所述图像中,得到映射的候选点;
7、基于所述映射的候选点及所述图像确定瞳孔边缘点,将各瞳孔边缘点的中心位置作为瞳孔定位点。
8、可选地,基于所述映射的候选点及所述图像确定瞳孔边缘点,包括:
9、对于任一映射的候选点,向该候选点圆周范围内的多个方向搜索边缘点:对于其中任一方向,若该方向上以第一半径和预设弧长所确定的弧上各点的像素值均值,与以第二半径和预设弧长所确定的弧上各点的像素值均值的差大于第一阈值,则以该方向上第一半径或第二半径处的点作为该方向的边缘点,所述第一半径比所述第二半径的长度多第一预设数量个像素。
10、可选地,对于任一映射的候选点,向该候选点圆周范围内的多个方向搜索边缘点后,还包括:
11、若任一所述候选点所对应的边缘点数量小于对应阈值,或/和,该候选点所对应的各边缘点位置的离散程度大于对应阈值,则删除该候选点;
12、确定删除后剩余的候选点所对应的各边缘点位置的离散程度最优的候选点,将该候选点所对应的各边缘点作为瞳孔边缘点。
13、可选地,将各瞳孔边缘点的中心位置作为瞳孔定位点,包括:
14、对各瞳孔边缘点进行椭圆拟合,以得到的椭圆的中心坐标,作为瞳孔定位点。
15、可选地,从各张所述待处理图像中检测出瞳孔的候选点,包括:
16、对所述待处理图像的每一点建立m个向量,所述m个向量分别对应不同的角度,所述向量表征在本点的本向量对应角度上的l个点与本点的像素值差异情况,m、l均为大于等于2的正整数,所述向量的模长表征在本点的本向量对应角度上的l个点与本点的像素值差异总和大小,所述向量的方向根据本向量对应角度以及像素值差异总和的正负确定;
17、获取所述待处理图像的每一点的m个向量的累加向量,并确定所述累加向量对应的方向区间值,得到所述待处理图像的方向区间值分布图,所述方向区间值分布图的任一点的像素值为所述待处理图像的相应点的所述累加向量对应的方向区间值,所述累加向量对应的方向区间值表示所述累加向量所属的方向区间,所述方向区间为圆周范围内平均划分出的n个区间,n为大于等于2的正整数;
18、根据所述方向区间值分布图的像素值分布情况确定瞳孔的候选点。
19、可选地,根据所述方向区间值分布图的像素值分布情况确定瞳孔的候选点,包括:
20、获取方向区间值分布图或n′值分布图的梯度分布图,所述梯度分布图的任一点的像素值反映所述方向区间值分布图或n′值分布图中该点与相邻点之间的像素值差异情况,所述n′值分布图由所述方向区间值分布图根据预设对应关系获得,所述n′值分布图的像素值为1至n′中的任一数值,n′为大于2且小于n的正整数,所述预设对应关系为所述累加向量对应的方向区间值与1至n′中各个数值的对应关系;
21、对于所述梯度分布图的任一点,若该点的像素值与其预设邻域内各点的像素值之和大于对应阈值,则确定该点为所述候选点。
22、可选地,确定所述累加向量对应的方向区间值后,还包括:
23、从所述待处理图像中裁剪出以所述候选点为中心的图像块;
24、分别获取所述图像块中所述累加向量属于各个方向区间的点的数量;
25、根据所述各个方向区间的点的数量计算占比,若所述图像块中至少一个方向区间的占比小于等于第三阈值,则删除所述图像块对应的所述候选点。
26、可选地,确定所述累加向量对应的方向区间值后,还包括:
27、从所述待处理图像中裁剪出以所述候选点为中心的图像块,获取所述图像块中所述累加向量属于同一方向区间的像素的平均位置,并以所述图像块中的预设位置和所述平均位置为端点,建立该方向区间的映射向量;
28、计算所述图像块的任意相邻两个所述方向区间的所述映射向量的角度差,所述角度差为该相邻两个所述方向区间中沿顺/逆时针方向的后一所述方向区间的所述映射向量与前一所述方向区间的所述映射向量的角度差,若计算得到的角度差中有至少一个角度差的正负性与其它角度差的正负性不同,则删除所述图像块对应的所述候选点。
29、可选地,检测出瞳孔的候选点后,和/或,得到映射的候选点后,进行候选点合并:
30、对于每一候选点,在其余候选点中筛选出与本候选点的距离小于第四阈值的候选点,与本候选点组成集合;
31、循环进行以下过程:对于所述集合中的每一所述候选点,以本候选点为圆心、以所述第四阈值为半径划出圆形区域,将处于所述圆形区域内的候选点归入所述集合;直到所述集合包括的候选点的数量不变,停止循环;
32、将得到的所述集合中的各候选点的平均位置对应的坐标点作为合并后的候选点。
33、一种基于多尺度图像的瞳孔定位装置,包括:
34、存储器,用于存储计算机程序;
35、处理器,用于执行所述计算机程序时实现如上所述的基于多尺度图像的瞳孔定位方法。
36、由上述技术方案可知,本发明所提供的基于多尺度图像的瞳孔定位方法及装置,首先对图像进行多种不同尺度的降采样处理,分别得到多张待处理图像,从各张待处理图像中检测出瞳孔的候选点,将从各张待处理图像得到的所有候选点根据对应尺度映射到图像中,得到映射的候选点,进一步基于映射的候选点及所述图像确定瞳孔边缘点,将各瞳孔边缘点的中心位置作为瞳孔定位点。
37、由于实际场景中环境复杂多样的影响以及人头部的移动或者眼球的眼动反应的影响,在获得的图像中瞳孔的大小是不固定的,本发明中获得图像的多种不同尺度下的图像,从各种尺度下的图像中检测对应瞳孔的候选点,有助于较准确地定位出瞳孔。另外,本发明中在图像中基于映射的候选点确定瞳孔边缘点,根据瞳孔边缘点确定出瞳孔位置,对于瞳孔完整或者瞳孔部分被遮挡的情况都能适用,且能够适应实际场景中复杂多样的环境,降低人头部的移动或者眼球的眼动反应的影响,能够在各种不理想的条件下快速、准确的定位到瞳孔。
- 还没有人留言评论。精彩留言会获得点赞!