自动驾驶视觉感知模型的训练方法及其训练装置与流程
本发明涉及数据处理,尤其是涉及一种自动驾驶视觉感知模型的训练方法及其训练装置。
背景技术:
1、在自动驾驶领域中,视觉感知模型是不可或缺的重要一环。视觉感知模型的训练需要大量的标注数据,而如何精确地选择对模型效果有提升的数据送去标注并补充进训练集是非常重要的。
2、相关技术中,对模型效果有提升的数据的选择通常具有以下三种方式:一是对采集数据随机抽帧,但是该方法成本较高,且大量数据标注返还的等待时间也较长;二是对采集数据进行规则式采样或数据均衡,但是以该方法选择的数据在训练模型后,仍是对模型整体效果的提升,而无法针对性的解决模型的短板及不足;三是对评测集bad-case进行采样处理并检索相似的采集数据集后送去标注,但是该方法过度依赖于检索的准确度。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明的一个目的在于提出一种自动驾驶视觉感知模型的训练方法,采用该训练方法可以精确且有针对性地筛选出对模型训练有价值的待标注数据,有效提升模型效果,且可以节省时间成本和资金成本。
2、本发明的目的之二在于提出一种自动驾驶视觉感知模型的训练装置。
3、本发明的目的之三在于提出一种计算机存储介质。
4、本发明的目的之四在于提出一种电子设备。
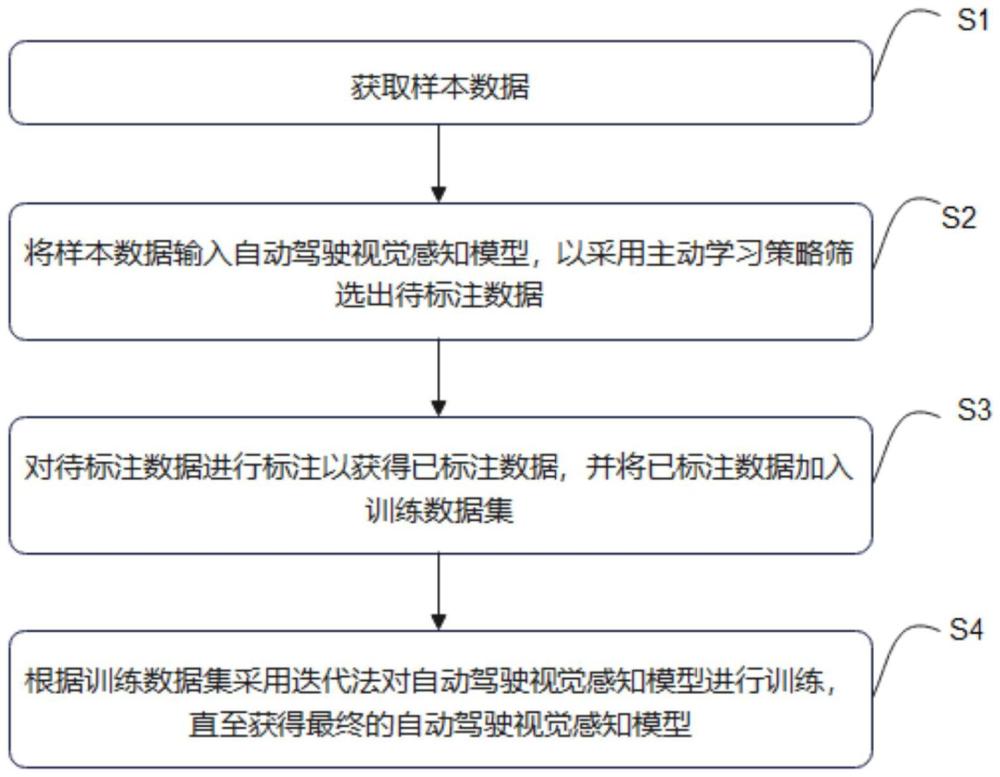
5、为了解决上述问题,本发明第一方面实施例提供一种自动驾驶视觉感知模型的训练方法,包括:获取样本数据;将所述样本数据输入自动驾驶视觉感知模型,以采用主动学习策略筛选出待标注数据;对所述待标注数据进行标注以获得已标注数据,并将所述已标注数据加入训练数据集;根据所述训练数据集采用迭代法对所述自动驾驶视觉感知模型进行训练,直至获得最终的自动驾驶视觉感知模型。
6、根据本发明实施例的自动驾驶视觉感知模型的训练方法,利用自动驾驶视觉感知模型采用主动学习策略从采集的样本数据中筛选出待标注数据,即将主动学习策略引入对自动驾驶视觉感知模型筛选训练数据的任务中,由自动驾驶视觉感知模型自行选择出对自身训练有价值的数据以作为待标注数据,实现精确且有针对性地筛选出对模型训练有价值的待标注数据的目的,且可以有效节省时间成本和资金成本,进而将该待标注数据完成标注后加入训练数据集中,以训练数据集重新训练并更新迭代自动驾驶视觉感知模型,由此利用自动驾驶视觉感知模型主动筛选的待标注数据来优化自身,可以避免训练的模型出现短板或不足的问题,有效提升模型效果。
7、在一些实施例中,将所述样本数据输入自动驾驶视觉感知模型,以采用主动学习策略筛选出待标注数据,包括:基于所述自动驾驶视觉感知模型对所述样本数据进行预测,以获得所述样本数据中每个目标对象的预测概率;根据每个目标对象的预测概率计算每个目标对象的评估得分;根据每个目标对象的评估得分从所述样本数据中筛选出所述待标注数据。
8、在一些实施例中,根据每个目标对象的评估得分从所述样本数据中筛选出所述待标注数据,包括:将所述样本数据分为多组视角图像数据,其中,每组视角图像数据包括针对同一自动驾驶场景下采集的多个单视角图像数据;根据每个单视角图像数据中所包含的目标对象的评估得分计算每个单视角图像数据的评估得分;根据每个单视角图像数据的评估得分计算每组视角图像数据的综合评估得分;根据每组视角图像数据的综合评估得分从所述样本数据中筛选出所述待标注数据。
9、在一些实施例中,根据每组视角图像数据的综合评估得分从所述样本数据中筛选出所述待标注数据,包括:根据每组视角图像数据的综合评估得分对所有视角图像数据按照由大到小进行排序,以获得分值排序;将所述分值排序中前预设组数的视角图像数据作为所述待标注数据。
10、在一些实施例中,根据每组视角图像数据的综合评估得分从所述样本数据中筛选出所述待标注数据,包括:从所述样本数据中筛选出所述综合评估得分大于预设评估得分阈值的视角图像数据,以作为所述待标注数据。
11、在一些实施例中,直至获得最终的自动驾驶视觉感知模型,包括:获取所述自动驾驶视觉感知模型的迭代次数;所述迭代次数达到预设迭代次数,则确定本次训练后的自动驾驶视觉感知模型为最终的自动驾驶视觉感知模型。
12、在一些实施例中,直至获得最终的自动驾驶视觉感知模型,包括:获取本次训练后的自动驾驶视觉感知模型的效果指标;所述效果指标达到预设效果指标,则确定所述本次训练后的自动驾驶视觉感知模型为最终的自动驾驶视觉感知模型。
13、本发明第二方面实施例提供一种自动驾驶视觉感知模型的训练装置,包括:获取模块,用于获取样本数据;筛选模块,用于将所述样本数据输入自动驾驶视觉感知模型,以采用主动学习策略筛选出待标注数据;训练数据集获取模块,用于对所述待标注数据进行标注以获得已标注数据,并将所述已标注数据加入训练数据集;模型训练模块,用于根据所述训练数据集采用迭代法对所述自动驾驶视觉感知模型进行训练,直至获得最终的自动驾驶视觉感知模型。
14、根据本发明实施例的自动驾驶视觉感知模型的训练装置,利用自动驾驶视觉感知模型采用主动学习策略从采集的样本数据中筛选出待标注数据,即将主动学习策略引入对自动驾驶视觉感知模型筛选训练数据的任务中,由自动驾驶视觉感知模型自行选择出对自身训练有价值的数据以作为待标注数据,实现精确且有针对性地筛选出对模型训练有价值的待标注数据的目的,且可以有效节省时间成本和资金成本,进而将该待标注数据完成标注后加入训练数据集中,以训练数据集重新训练并更新迭代自动驾驶视觉感知模型,由此利用自动驾驶视觉感知模型主动筛选的待标注数据来优化自身,可以避免训练的模型出现短板或不足的问题,有效提升模型效果。
15、本发明第三方面实施例提供一种计算机存储介质,其上存储有计算机程序,其中,所述计算机程序被处理器执行时实现上述实施例所述的自动驾驶视觉感知模型的训练方法。
16、本发明第四方面实施例提供一种电子设备,包括:至少一个处理器;与至少一个所述处理器通信连接的存储器;其中,所述存储器中存储有可被至少一个所述处理器执行的计算机程序,至少一个所述处理器执行所述计算机程序时实现上述实施例所述的自动驾驶视觉感知模型的训练方法。
17、根据本发明实施例的电子设备,通过处理器执行上述实施例提供的自动驾驶视觉感知模型的训练方法,可以精确且有针对性的筛选出对模型训练有价值的待标注数据,有效提升模型效果,且可以节省时间成本和资金成本。
18、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种自动驾驶视觉感知模型的训练方法,其特征在于,包括:
2.根据权利要求1所述的自动驾驶视觉感知模型的训练方法,其特征在于,将所述样本数据输入自动驾驶视觉感知模型,以采用主动学习策略筛选出待标注数据,包括:
3.根据权利要求2所述的自动驾驶视觉感知模型的训练方法,其特征在于,根据每个目标对象的评估得分从所述样本数据中筛选出所述待标注数据,包括:
4.根据权利要求3所述的自动驾驶视觉感知模型的训练方法,其特征在于,根据每组视角图像数据的综合评估得分从所述样本数据中筛选出所述待标注数据,包括:
5.根据权利要求3所述的自动驾驶视觉感知模型的训练方法,其特征在于,根据每组视角图像数据的综合评估得分从所述样本数据中筛选出所述待标注数据,包括:
6.根据权利要求1所述的自动驾驶视觉感知模型的训练方法,其特征在于,直至获得最终的自动驾驶视觉感知模型,包括:
7.根据权利要求1所述的自动驾驶视觉感知模型的训练方法,其特征在于,直至获得最终的自动驾驶视觉感知模型,包括:
8.一种自动驾驶视觉感知模型的训练装置,其特征在于,包括:
9.一种计算机存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1-7任一项所述的自动驾驶视觉感知模型的训练方法。
10.一种电子设备,其特征在于,包括:
技术总结
本发明公开了一种自动驾驶视觉感知模型的训练方法及其训练装置,所述自动驾驶视觉感知模型的训练方法,包括:获取样本数据;将所述样本数据输入自动驾驶视觉感知模型,以采用主动学习策略筛选出待标注数据;对所述待标注数据进行标注以获得已标注数据,并将所述已标注数据加入训练数据集;根据所述训练数据集采用迭代法对所述自动驾驶视觉感知模型进行训练,直至获得最终的自动驾驶视觉感知模型。采用该训练方法可以精确且有针对性地筛选出对模型训练有价值的待标注数据,有效提升模型效果,且可以节省时间成本和资金成本。
技术研发人员:艾锐,宋雨豪,陈明华,陈康亮,顾维灏
受保护的技术使用者:毫末智行科技有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!