高清超广角镜头、车载激光雷达与视觉的融合方法及系统与流程
本发明涉及光学元件,特别涉及一种高清超广角镜头、车载激光雷达与视觉的融合方法及系统。
背景技术:
1、智能交通系统是一种在大范围内、全方位发挥作用的准时、准确、高效的交通运输管理体系,它在交通运输管理体系中把先进的计算机处理技术、信息处理技术、数据通讯传输技术及电子控制技术等有效地进行了综合运用。
2、智能交通系统对镜头的要求越来越高,目前市场上的智能交通镜头在满足大光圈、大靶面的同时,很难兼顾光学系统的像质,导致镜头的使用环境受到很大限制。
3、智能交通系统中,基于单目视觉的感知系统可以低成本实现令人满意的性能,但却无法提供可靠的3d信息,且基于视觉的感知系统在光照条件复杂的情况下鲁棒性较低。
4、激光雷达不受光照条件影响,能提供高精度的3d信息,但是在智能交通系统领域,单纯的激光雷达并不足以满足对复杂路况的感知要求,例如激光雷达无法获得颜色信息,能“看到”红绿灯但是不能判断具体什么信号,且雷达成本高昂,分辨率和刷新率低下,在实际驾驶中需要更多的信息综合判断。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种兼顾像质高与低总长的优点的高清超广角镜头,采用的技术方案为:
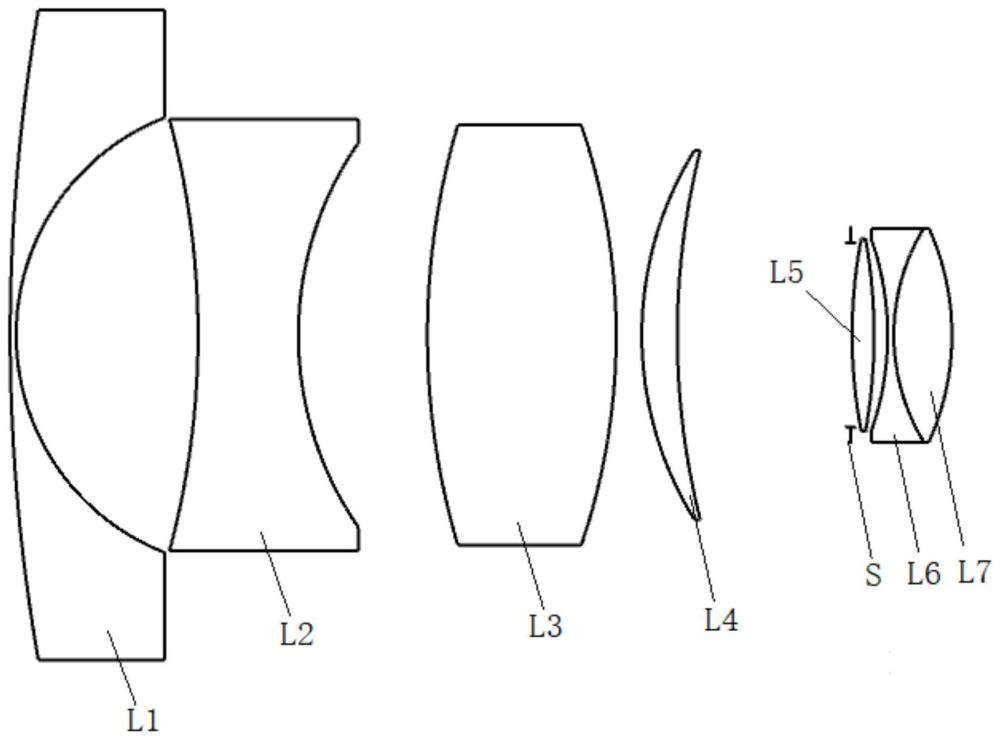
2、一种高清超广角镜头,包括沿着光轴从物面到像面依次分布的第一透镜、第二透镜、第三透镜、第四透镜、第五透镜、光阑、第六透镜和第七透镜,
3、所述第一透镜为负弯月透镜;
4、所述第二透镜为双凹透镜,其光焦度为负;
5、所述第三透镜为双凸透镜,其光焦度为正;
6、所述第四透镜为正弯月透镜;
7、所述第五透镜为双凸透镜,其光焦度为正;
8、所述第六透镜为双凹透镜,其光焦度为负;
9、所述第七透镜为双凸透镜,其光焦度为正。
10、本发明的一种实施例解决其技术问题所采用的技术方案是,所述第六透镜和第七透镜形成一胶合透镜。
11、本发明的一种实施例解决其技术问题所采用的技术方案是,所述高清超广角镜头的总长小于16mm。
12、本发明的一种实施例解决其技术问题所采用的技术方案是,高清超广角镜头的焦距和该镜头的各透镜满足以下条件:
13、-2.9<f1/f<-2.3,
14、-2.7<f2/f<-2.1,
15、3<f3/f<3.6,
16、3.4<f4/f<4,
17、1.5<f5/f<2.1,
18、-3.8<f6/f<-3.2,
19、-1<f6/f7<0。
20、其中,f为高清超广角镜头的焦距,f1为第一透镜的焦距,f2为第二透镜的焦距,f3为第三透镜的焦距,f4为第四透镜的焦距,f5为第五透镜的焦距,f6为第六透镜的焦距。
21、本发明的一种实施例解决其技术问题所采用的技术方案是,第一透镜、第二透镜,第三透镜,第四透镜,第五透镜,第六透镜和第七透镜的材料折射率和材料阿贝常数分别满足:
22、第一透镜:nd1≦1.6,vd4≧40;
23、第二透镜:nd1≦1.6,vd4≧45;
24、第三透镜:nd1≧1.6,vd4≧60;
25、第四透镜:nd1≦2,vd4≦40;
26、第五透镜:nd1≧1.8,vd4≧40;
27、第六透镜:nd1≧1.8,vd4≦40;
28、第七透镜:nd1≦1.6,vd4≧40;
29、其中nd为材料折射率,vd为阿贝常数。
30、本发明的一种实施例解决其技术问题所采用的技术方案是,所述第一透镜、第二透镜,第三透镜,第四透镜,第五透镜,第六透镜和第七透镜的材质均为玻璃。
31、本技术还提出一种车载激光雷达与视觉的融合方法,包括:
32、步骤1、单目视觉系统采集预设场景的图像数据,单目视觉系统包括上述的高清超广角镜头,利用预设场景的图像数据对深度学习模型进行预设场景中物体的图像分割训练,获得图像分割模型及每种物体的权重;
33、步骤2、预设三种分类类型为交通标识、常见物体和未知物体,对三种分类类型的物体分别赋予阈值s1、s2、s3,将预设场景的图像数据输入完成训练的图像分割模型中,获得的预设场景图像分割区域并输入深度学习模型中进行物体的识别分类训练,获得图像识别分类模型;
34、步骤3、激光雷达发射激光并接收物体的反射信号,激光雷达信号处理器基于反射信号获取点云数据,将阈值s1、s2、s3作为对应分类类型的物体的点云数据的过滤阈值,综合信号处理器分别进行对三种分类类型的物体的点云数据滤波去除噪声的迭代训练,获得阈值s1’、s2’、s3’;
35、步骤4、采集外部环境的实时图像数据和实时点云数据,将实时图像数据输入图像分割模型进行图像分割,并对实时图像分割区域分别赋予权重;将实时图像分割区域输入图像识别分类模型进行识别分类;
36、步骤5、根据实时图像分割区域的权重分别分配算力资源,且算力资源与权重正相关,提取分类类型为三种分类类型的实时图像分割区域的实时点云数据,将阈值s1’、s2’、s3’分别作为三种分类类型物体的实时点云数据的过滤阈值,利用分配的算力资源和对应分类类型的过滤阈值对实时图像分割区域的实时点云数据进行滤波,再去除噪声后建立模型并发送至外部设备。
37、作为优选,还包括步骤7,将分类结果发送至综合信号处理器,综合信号处理器对实时图像数据中分类结果为交通标识的图像分割区域进行标记并发送至外部设备。
38、本技术还提出一种车载激光雷达与视觉的融合系统,包括信息处理器以及可分别与所述信息处理器进行通信的激光雷达和单目视觉系统,所述单目视觉系统采用上述的高清超广角镜头,所述信息处理器包括单目视觉信号处理器、激光雷达信号处理器和综合信号处理器;
39、所述单目视觉系统用于采集实时图像数据并发送至所述单目视觉信号处理器,
40、所述单目视觉信号处理器搭载有图像分割模型和图像识别分类模型,所述图像分割模型用于对实时图像数据进行图像分割以及对实时图像分割区域分别赋予权重并发送至所述综合信号处理器,所述图像识别分类模型用于对实时图像分割区域进行识别分类并将识别结果发送至所述综合信号处理器;
41、所述激光雷达用于发射激光及接收物体的反射信号并发送至所述激光雷达信号处理器,所述激光雷达信号处理器用于基于反射信号获取点云数据并将点云数据发送至所述综合信号处理器;
42、所述综合信号处理器用于根据实时图像分割区域的权重分别分配算力资源,且算力资源与权重正相关,提取分类类型为交通标识、常见物体和未知物体的实时图像分割区域对应的实时点云数据,利用分配的算力资源和对应分类类型的过滤阈值对实时图像分割区域的实时点云数据进行滤波,再去除噪声后建立模型并发送至外部设备;还用于将实时图像数据中分类结果为交通标识的图像分割区域进行标记并发送至外部设备。
43、本发明的有益效果:
44、本发明所涉及镜头具有结构紧凑,设计合理,总长较短,体积小的优点,有高低温补偿功能,tv畸变较小,大孔径保障通光量的优点,兼顾像质高与低总长的优点,具有较高市场价值;
45、本发明涉及的车载激光雷达视觉融合方案方便实用,性价比高,综合了视觉镜头快速成像的优点以及激光雷达精准测距测速的优点。
- 还没有人留言评论。精彩留言会获得点赞!