一种基于实时网格的三维点云质量判断的方法与流程
1.本发明涉及三维点云质量判断技术领域,尤其涉及一种基于实时网格的三维点云质量判断的方法。
背景技术:
2.在三维扫描设备领域中,扫描设备的工作流程如下:通过获取2d图像信息重建出3d点云,并将3d点云按照其特征拼接起来形成完整的统一坐标系下点云,最后由3d点云生成3d网格,完成现实物体的数字化。三维实时扫描应用中,所见即所得的实时渲染是一个重要环节。
3.实时扫描中用户交互有点云渲染和网格渲染两种方式,点云渲染比网格渲染网格速度快,能满足实时渲染的要求,但在很多场景中,3d网格是三维扫描设备领域实时渲染和最终输出,其主要原因如下:
4.(1)3d网格是3d打印的基础
5.(2)3d网格通过渲染,能有效的反应实物的特征
6.(3)3d网格有几何拓扑特性,能有效表达连通性。
7.(4)3d网格能够有效进行纹理贴图,真实反应物体表面
8.3d网格的实时渲染能提高扫描质量,增强用户体验。
9.三维扫描中实时渲染3d网格,即时呈现已扫描数据的特点,能够有效提高扫描导航;其几何拓扑特性能够帮助算法及时有效的的去除噪点,避免噪点数据的累积。
10.因此实现扫描中网格实时化,不仅能够提高扫描的精确度,而且能够极大地增强用户体验,是很多三维扫描设备产品必备的功能。
11.实际扫描过程中,由于光线,口水泡,相机校准,操作不当原因产生噪声,导致部分三维重建的点云质量(精度)不佳,严重时会影响整个扫描的准确度。但点云质量的判断一般需要借助该点的邻域关系,且判断难度较大。
12.三维实时网格是由三维点云产生,其生成的过程已经涉及到点云的邻域关系,通过在网格的生成过程中识别网格的质量,然后映射到对应空间位置的点云,可以进行点云质量的判断。这种情况一般通过复扫可以解决,较为严重的情况通过将已扫描的部分数据裁剪后重新扫描来解决。
技术实现要素:
13.(一)解决的技术问题
14.针对现有技术的不足,本发明提供了一种基于实时网格的三维点云质量判断的方法,具备及时清除了糟糕点云,避免了误差积累,提高了扫描的整体精度,用于解决现有技术中由于网格的生成采用的点云以及其邻域的关系,因此对于局部质量较差的点云,会由于其邻域点的关系,产生相对光滑的网格,给出错误的导航效果的问题。
15.(二)技术方案
16.本发明提供如下技术方案:一种基于实时网格的三维点云质量判断的方法,包括以下步骤:
17.s1、基于volume的隐函数值计算空间的所有voxels;
18.s2、遍历扫描所述空间的所有voxels,抽取所述voxels内可产生三角面的voxels_select;
19.s3、对于抽取出来的每一个voxels_select,判断其有几个三角面片,该判断方法是算法marchingcubes,所述算法marchingcubes包括根据voxle的八个顶点tsdf值检索查找每一个voxels_select的三角面片数量;
20.s4、遍历所有的voxels_select,采用marchingcubes方法生成所有voxels_select的三角面;
21.s5、遍历所有的三角面片;
22.s6、利用ui对所述三角面片进行渲染标记,并将渲染标记的三角面以醒目的方式进行展示;
23.s7、根据实时网格渲染提示,进行复扫,直至三角面提示消失;
24.s8、如果反复复扫,三角面提示不消失,提示用户进行裁剪后复扫该区域,或者裁剪后改善扫描环境。
25.通过本发明所提供的一种基于实时网格的三维点云质量判断的方法,能够用于对三维点云质量进行判断,本发明所提供的判断方法具备及时清除了糟糕点云,避免了误差积累,提高了扫描的整体精度,用于解决现有技术中由于网格的生成采用的点云以及其邻域的关系,因此对于局部质量较差的点云,会由于其邻域点的关系,产生相对光滑的网格,给出错误的导航效果的问题。
26.在一种可能的实施方式中,在s1中,具体步骤如下:
27.s1.1、volume方法是将扫描空间划分为一个个细小立方体称为voxel;一个扫描空间有很多个voxel组成;
28.s1.2、每个voxel有八个顶点,根据点云的坐标和法向,计算点云邻域的voxel八个顶点的tsdf值(标量值);
29.s1.3、实时网格的三角面有所有voxels产生,三角面的顶点均在voxel的12条边上。
30.在一种可能的实施方式中,在s1.2中计算点云邻域的voxel步骤如下:
31.s1.21、对于voxel的每一个顶点,取其坐标为q(x1,y1,z1);点云p的坐标为p(x2,y2,z2),p的法线为pn(xn,yn,zn);
32.s1.22、计算sdf=(p-q)*q=xn(x1-x2)+yn(y1-y2)+zn(z1-z2);
33.s1.23、将sdf截断后得到tsdf,截断的规则是fmin《=sdf且sdf《=fmax,其中fmin和fmax根据实际情况设置。
34.在一种可能的实施方式中,在s3中marchingcubes算法用来根据voxel的八个顶点的正负号,判断是否有三角面片。
35.在一种可能的实施方式中,在s3中,具体操作步骤如下:
36.s3.1、遍历每一个三角面,计算该三角面的每个顶点所在边e(p1,p2)的梯度(边e的两个顶点p1,p2的tsdf之差/e边长);
37.s3.2、e的梯度小于设定阈值threshold,则标记该顶点。
38.在一种可能的实施方式中,在s5中如果一个三角面的有一个顶点被标记,则将该三角面片标记。
39.与现有技术相比,本发明提供了一种基于实时网格的三维点云质量判断的方法,具备以下有益效果:
40.本发明通过在实时网格的基础上,进行局部网格质量的判断,并在网格渲染界面,给出提示(例如将质量差的三角面以一种警告颜色显示),用户会根据提示进行复扫,直到该提示网格消失。这在一定程度上及时清除了糟糕点云,避免了误差积累,提高了扫描的整体精度;也大大提高了扫描的流畅度,减少了用户的判断时间,提高了用户体验。
41.应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本发明。
附图说明
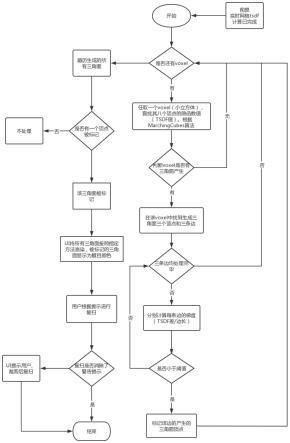
42.图1为本发明所提供的一种基于实时网格的三维点云质量判断的点云质量检测流程图。
具体实施方式
43.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
44.实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
45.如图1所示,本发明提供了一种基于实时网格的三维点云质量判断的方法,包括以下步骤:
46.s1、基于volume的隐函数值计算空间的所有voxels;
47.s1.1、volume方法是将扫描空间划分为一个个细小立方体称为voxel;一个扫描空间有很多个voxel组成。
48.s1.2、每个voxel有八个顶点,根据点云的坐标和法向,计算点云邻域的voxel八个顶点的tsdf值(标量值)。
49.计算点云邻域的voxel步骤如下:
50.s1.21、对于voxel的每一个顶点,取其坐标为q(x1,y1,z1);点云p的坐标为p(x2,y2,z2),p的法线为pn(xn,yn,zn);
51.s1.22、计算sdf=(p-q)*q=xn(x1-x2)+yn(y1-y2)+zn(z1-z2);
52.s1.23、将sdf截断后得到tsdf,截断的规则是fmin《=sdf且sdf《=fmax,其中fmin和fmax根据实际情况设置。
53.s1.3、实时网格的三角面有所有voxels产生,有些voxel没有三角面生成,有些voxel可能会有多个三角面生成,三角面的顶点均在voxel的12条边上。
54.s2、遍历扫描所述空间的所有voxels,抽取所述voxels内可产生三角面的voxels_select;
55.s3、对于抽取出来的每一个voxels_select,判断其有几个三角面片,该判断方法是算法marchingcubes,所述算法marchingcubes包括根据voxle的八个顶点tsdf值检索查找每一个voxels_select的三角面片数量;
56.s3.1、遍历每一个三角面,计算该三角面的每个顶点所在边e(p1,p2)的梯度(边e的两个顶点p1,p2的tsdf之差/e边长);
57.s3.2、e的梯度小于设定阈值threshold,则标记该顶点。
58.s4、遍历所有的voxels_select,采用marchingcubes方法生成所有voxels_select的三角面;
59.s5、遍历所有的三角面片;
60.如果一个三角面的有一个顶点被标记,则将该三角面片标记。
61.s6、利用ui对所述三角面片进行渲染标记,并将渲染标记的三角面以醒目的方式进行展示;
62.s7、根据实时网格渲染提示,进行复扫,直至三角面提示消失;
63.s8、如果反复复扫,三角面提示不消失,提示用户进行裁剪后复扫该区域,或者裁剪后改善扫描环境。
64.通过本发明所提供的一种基于实时网格的三维点云质量判断的方法,能够用于对三维点云质量进行判断,本发明所提供的判断方法具备及时清除了糟糕点云,避免了误差积累,提高了扫描的整体精度,用于解决现有技术中由于网格的生成采用的点云以及其邻域的关系,因此对于局部质量较差的点云,会由于其邻域点的关系,产生相对光滑的网格,给出错误的导航效果的问题。
65.尽管已经示出和描述了本发明实施的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其同物限定。
66.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
67.下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1