一种电力作业用机器人管理系统及其管理方法与流程
1.本发明属于电力作业机器人调度管理的技术领域,具体涉及一种电力作业用机器人管理系统及其管理方法。
背景技术:
2.针对高危或工作人员难以操作难以到达的工作区域,为了对其中的电力设备进行作业,需要采用电力作业机器人取代人工的方式对电力设备进行作业。为了使得工作区域中的电力设备的作业需求与配置的电力机器人以及移动充电桩匹配,因此需要对电力机器人以及移动充电桩进行合理的配置与调度。现有的电力机器人调度管理系统,只是根据不同工作区域中电力设备的作业需求直接配置相应的电力作业机器人以及移动充电桩,但是当工作区域中的电力设备的作业需求动态变化时,现有的电力机器人调度管理系统就不能动态调度电力作业机器人以及移动充电桩进行实时配置,进而造成某些工作区域中的电力作业机器人以及移动充电桩富余,某些工作区域中的电力作业机器人以及移动充电桩不足的情况发生。
3.因此,针对现有技术中的电力机器人调度管理系统不能根据工作区域中电力设备的作业需求变化而动态管理调度电力作业机器人以及移动充电桩进行实时动态配置的缺陷,本发明公开了一种电力作业用机器人管理系统及其管理方法。
技术实现要素:
4.本发明的目的在于提供一种电力作业用机器人管理系统及其管理方法,能够分区块对电力工作区域中的电力作业机器人以及移动充电桩进行动态调度,使得各个工作区块中的电力作业机器人以及移动充电桩的数量满足当前工作区块中电力设备的作业需求,避免出现工作区块中的电力作业机器人以及移动充电桩与电力设备的作业需求不匹配的情况发生。
5.本发明通过下述技术方案实现:一种电力作业用机器人管理系统,用于调度管理若干电力作业机器人以及移动充电桩,包括调度主机,还包括与调度主机连接的区域划分模块、充电桩配置模块、机器人配置模块、任务预测分配模块、rfid模块、线路规划模块;所述区域划分模块用于建立工作区域的虚拟地图,并将虚拟地图划分为若干包含电力设备的工作区块;所述充电桩配置模块用于在工作区块中配置移动充电桩的位置与数量;所述机器人配置模块用于在工作区块中配置电力作业机器人的位置与数量;所述rfid模块设置在工作区块的进出口、电力作业机器人上、移动充电桩上,通过rfid模块检测进出工作区块的电力作业机器人与移动充电桩的数量位置信息;所述任务预测分配模块用于根据预先配置的任务列表预测各个工作区块中的并发任务量,并解算当前工作区块中的并发任务量与当前工作区块中的电力作业机器人与移
动充电桩的数量位置信息的匹配度,所述任务预测分配模块根据匹配度调度工作区块中的移动充电桩与电力作业机器人的位置与数量;所述线路规划模块用于对处于调度过程中的移动充电桩与电力作业机器人规划路线。
6.为了更好地实现本发明,进一步的,所述任务预测分配模块包括任务列表配置模块、任务预测模块、任务匹配模块、调度模块,所述任务列表配置模块用于配置工作区块中电力设备对应的电力作业的若干任务列表并建立若干任务列表的并发关系;所述任务预测模块根据若干任务列表的并发关系解算预测当前工作区块中同时并发的并发任务量;所述任务匹配模块将当前工作区块中同时并发的并发任务量与当前工作区块中的电力作业机器人与移动充电桩的数量位置信息进行匹配得到匹配度;所述调度模块根据匹配度调度工作区块中的移动充电桩与电力作业机器人的位置与数量。
7.为了更好地实现本发明,进一步的,所述调度模块包括移动充电桩调度模块与电力作业机器人调度模块,所述电力作业机器人调度模块将当前工作区块中同时并发的并发任务量与当前工作区块中的电力作业机器人的数量位置信息进行匹配得到机器人匹配度,并根据机器人匹配度调度当前工作区块中的电力作业机器人的位置与数量;所述移动充电桩调度模块计算调度完成后当前工作区块中的电力作业机器人的位置与数量与当前工作区块中移动充电桩的位置与数量之间的充电桩匹配度,并根据充电桩匹配度调度当前工作区块中的移动充电桩的位置与数量。
8.为了更好地实现本发明,进一步的,所述线路规划模块包括路程测算模块、电力匹配模块、路径匹配模块,所述路程测算模块用于检测移动充电桩与电力作业机器人在调度过程中的调度行程,所述电力匹配模块用于检测移动充电桩与电力作业机器人的留存电量,并通过留存电量计算移动充电桩与电力作业机器人的可行路程,所述路径匹配模块用于比对调度行程与可行路程,并根据比对结果生成指引电力作业机器人前往工作区块的第一路线或生成指引电力作业机器人前往移动充电桩进行充电的第二路线或生成指引移动充电桩前往充电设备进行自动充电的第三路线。
9.为了更好地实现本发明,进一步的,还包括设置在移动充电桩与电力作业机器人上的红外避障模块,所述红外避障模块用于检测移动充电桩与电力作业机器人的行进路线上的障碍物,并根据是否检测到障碍物将当前路线标记为可用或不可用。
10.为了更好地实现本发明,进一步的,所述rfid模块包括rfid读写器、rfid标签、gps定位器,所述rfid读写器对应工作区块的进出口设置,所述rfid标签与gps定位器设置在移动充电桩与电力作业机器人上,所述rfid读写器对rfid标签进行读写得到移动充电桩与电力作业机器人进出工作区块的数据,所述gps定位器用于检测移动充电桩与电力作业机器人在工作区块中的位置数据。
11.一种电力作业用机器人管理方法,基于权利要求-任一项所述的电力作业用机器人管理系统实现,包括以下步骤:步骤1、建立工作区域的虚拟地图,通过区域划分模块在虚拟地图上进行区域划分形成若干相互独立的工作区块,并保证每一个工作区块中均存在电力设备;步骤2、通过充电桩配置模块建立移动充电桩的虚拟充电桩模型并将虚拟充电桩
模型配置在工作区块中,所述充电桩配置模块对配置后工作区块中的虚拟充电桩模型的数量与位置坐标采集后发送至调度主机;通过机器人配置模块建立电力作业机器人的虚拟机器人模型并将虚拟机器人模型配置在工作区块中,所述机器人配置模块对配置后工作区块中的虚拟机器人模型的数量与位置坐标采集后发送至调度主机;步骤3、通过调度主机对各个工作区块配置任务列表,通过任务预测分配模块提取各个工作区块的任务列表,根据任务列表中各个任务之间的关联性计算预测当前工作区块中的并发任务量;步骤4、任务预测分配模块计算当前工作区块的并发任务量与当前工作区块中的移动充电桩的数量、电力作业机器人的数量的匹配度;若判断不匹配,则通过任务预测分配模块从其他判断匹配的工作区块调度移动充电装置与电力作业机器人至当前判断不匹配的工作区块;若判断匹配,则通过任务预测分配模块从当前判断匹配的工作区块调度移动充电装置与电力作业机器人至其他判断不匹配的工作区块;步骤5、在调度过程中,通过rfid模块检测进出工作区块的电力作业机器人与移动充电桩的数量数据与位置坐标数据,任务预测分配模块根据rfid模块检测的进出工作区块的电力作业机器人与移动充电桩的数量数据实时反馈调节电力作业机器人与移动充电桩的调度数量,线路规划模块根据rfid模块检测的进出工作区块电力作业机器人与移动充电桩的位置坐标数据规划路线。
12.为了更好地实现本发明,进一步的,所述步骤4具体包括:步骤4.1、通过任务预测分配模块比较当前工作区块中的电力作业机器人的数量与并发任务量所需电力作业机器人的数量的关系,若当前工作区块中的电力作业机器人的数量大于并发任务量所需电力作业机器人的数量则判断富余匹配;若当前工作区块中的电力作业机器人的数量等于并发任务量所需电力作业机器人的数量则判断对等匹配;若当前工作区块中的电力作业机器人的数量小于并发任务量所需电力作业机器人的数量则判断不匹配;步骤4.2、通过任务预测分配模块将判断富余匹配的工作区块中的电力作业机器人调度至判断不匹配的工作区块,将判断对等匹配的工作区块中的电力作业机器人调度至其他判断对等匹配的工作区块;步骤4.3、通过任务预测分配模块比较当前工作区块中的移动充电桩的数量与并发任务量所需移动充电桩的数量的关系,若当前工作区块中的移动充电桩的数量大于并发任务量所需移动充电桩的数量则判断富余匹配;若当前工作区块中的移动充电桩的数量等于并发任务量所需移动充电桩的数量则判断对等匹配;若当前工作区块中的移动充电桩的数量小于并发任务量所需移动充电桩的数量则判断不匹配;步骤4.4、通过任务预测分配模块将判断富余匹配的工作区块中的移动充电桩调度至判断不匹配的工作区块,将判断对等匹配的工作区块中的移动充电桩调度至其他判断对等匹配的工作区块。
13.为了更好地实现本发明,进一步的,若存在若干判断富余匹配的工作区块对应单个判断不匹配的工作区块,则通过rfid模块选取距离判断不匹配的工作区块距离最短的判断富余匹配的工作区块并规划路线;若存在单个判断富余匹配的工作区块对应若干判断不匹配的工作区块,则通过rfid模块选取所需电力作业机器人数量或移动充电桩数量最少的
判断不匹配的工作区块并规划路线。
14.本发明与现有技术相比,具有以下优点及有益效果:本发明通过将布设有电力设备的工作区域划分成若干工作区块,然后对工作区块中所需作业的并发任务量与当前工作区块中的电力作业机器人以及移动充电桩的数量进行匹配,进而根据匹配结果实时动态调度电力作业机器人以及移动充电桩在各个工作区块中的配置情况,使得各个工作区块中配置的电力作业机器人以及移动充电桩能够伴随电力设备作业需求的变化而动态调整,避免了工作区块中配置的电力作业机器人以及移动充电桩相比于电力设备作业需求富余或不足的问题,进而避免了配置电力作业机器人以及移动充电桩的富余浪费也避免了配置电力作业机器人以及移动充电桩的缺少不足。
附图说明
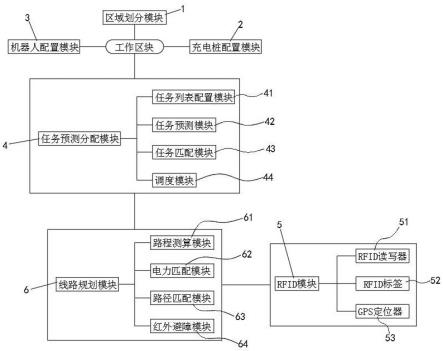
15.图1为电力作业用机器人管理系统的结构示意图;图2为若干富余匹配的工作区块与单个不匹配的工作区块的路线规划示意图;图3为单个富余匹配的工作区块与若干不匹配的工作区块的路线规划示意图。
16.其中:1-区域划分模块;2-充电桩配置模块;3-机器人配置模块;4-任务预测分配模块;5
‑ꢀ
rfid模块;6-线路规划模块;41-任务列表配置模块;42-任务预测模块;43-任务匹配模块;44-调度模块;51-rfid读写器;52
‑ꢀ
rfid标签;53
‑ꢀ
gps定位器;61-路程测算模块;62-电力匹配模块;63-路径匹配模块;64-红外避障模块。
具体实施方式
17.实施例1:本实施例的一种电力作业用机器人管理系统,如图1所示,用于调度管理若干电力作业机器人以及移动充电桩,包括调度主机,还包括与调度主机连接的区域划分模块1、充电桩配置模块2、机器人配置模块3、任务预测分配模块4、rfid模块5、线路规划模块6;所述区域划分模块1用于建立工作区域的虚拟地图,并将虚拟地图划分为若干包含电力设备的工作区块;所述充电桩配置模块2用于在工作区块中配置移动充电桩的位置与数量;所述机器人配置模块3用于在工作区块中配置电力作业机器人的位置与数量;所述rfid模块5设置在工作区块的进出口、电力作业机器人上、移动充电桩上,通过rfid模块5检测进出工作区块的电力作业机器人与移动充电桩的数量位置信息;所述任务预测分配模块4用于根据预先配置的任务列表预测各个工作区块中的并发任务量,并解算当前工作区块中的并发任务量与当前工作区块中的电力作业机器人与移动充电桩的数量位置信息的匹配度,所述任务预测分配模块4根据匹配度调度工作区块中的移动充电桩与电力作业机器人的位置与数量;所述线路规划模块6用于对处于调度过程中的移动充电桩与电力作业机器人规划路线。
18.实施例2:本实施例在实施例1的基础上做进一步优化,如图1所示,所述任务预测分配模块4包括任务列表配置模块41、任务预测模块42、任务匹配模块43、调度模块44,所述任务列表
配置模块41用于配置工作区块中电力设备对应的电力作业的若干任务列表并建立若干任务列表的并发关系;所述任务预测模块42根据若干任务列表的并发关系解算预测当前工作区块中同时并发的并发任务量;所述任务匹配模块43将当前工作区块中同时并发的并发任务量与当前工作区块中的电力作业机器人与移动充电桩的数量位置信息进行匹配得到匹配度;调度模块44根据匹配度调度工作区块中的移动充电桩与电力作业机器人的位置与数量。
19.本实施例的其他部分与实施例1相同,故不再赘述。
20.实施例3:本实施例在上述实施例1或2的基础上做进一步优化,所述调度模块44包括移动充电桩调度模块与电力作业机器人调度模块,所述电力作业机器人调度模块将当前工作区块中同时并发的并发任务量与当前工作区块中的电力作业机器人的数量位置信息进行匹配得到机器人匹配度,并根据机器人匹配度调度当前工作区块中的电力作业机器人的位置与数量;所述移动充电桩调度模块计算调度完成后当前工作区块中的电力作业机器人的位置与数量与当前工作区块中移动充电桩的位置与数量之间的充电桩匹配度,并根据充电桩匹配度调度当前工作区块中的移动充电桩的位置与数量。
21.本实施例的其他部分与上述实施例1或2相同,故不再赘述。
22.实施例4:本实施例在上述实施例1-3任一项的基础上做进一步优化,如图1所示,所述线路规划模块6包括路程测算模块61、电力匹配模块62、路径匹配模块63,路程测算模块61用于检测移动充电桩与电力作业机器人在调度过程中的调度行程,所述电力匹配模块62用于检测移动充电桩与电力作业机器人的留存电量,并通过留存电量计算移动充电桩与电力作业机器人的可行路程,所述路径匹配模块63用于比对调度行程与可行路程,并根据比对结果生成指引电力作业机器人前往工作区块的第一路线或生成指引电力作业机器人前往移动充电桩进行充电的第二路线或生成指引移动充电桩前往充电设备进行自动充电的第三路线。
23.进一步的,还包括设置在移动充电桩与电力作业机器人上的红外避障模块64,所述红外避障模块64用于检测移动充电桩与电力作业机器人的行进路线上的障碍物,并根据是否检测到障碍物将当前路线标记为可用或不可用。
24.本实施例的其他部分与上述实施例1-3任一项相同,故不再赘述。
25.实施例5:本实施例在上述实施例1-4任一项的基础上做进一步优化,如图1所示,所述rfid模块5包括rfid读写器51、rfid标签52、gps定位器53,所述rfid读写器51对应工作区块的进出口设置,所述rfid标签52与gps定位器53设置在移动充电桩与电力作业机器人上,所述rfid读写器51对rfid标签52进行读写得到移动充电桩与电力作业机器人进出工作区块的数据,所述gps定位器53用于检测移动充电桩与电力作业机器人在工作区块中的位置数据。
26.本实施例的其他部分与上述实施例1-4任一项相同,故不再赘述。
27.实施例6:一种电力作业用机器人管理方法,基于上述的电力作业用机器人管理系统实现,包括以下步骤:步骤1、建立工作区域的虚拟地图,通过区域划分模块1在虚拟地图上进行区域划分形成若干相互独立的工作区块,并保证每一个工作区块中均存在电力设备;步骤2、通过充电桩配置模块2建立移动充电桩的虚拟充电桩模型并将虚拟充电桩模型配置在工作区块中,所述充电桩配置模块2对配置后工作区块中的虚拟充电桩模型的数量与位置坐标采集后发送至调度主机;通过机器人配置模块3建立电力作业机器人的虚拟机器人模型并将虚拟机器人模型配置在工作区块中,所述机器人配置模块3对配置后工作区块中的虚拟机器人模型的数量与位置坐标采集后发送至调度主机;步骤3、通过调度主机对各个工作区块配置任务列表,通过任务预测分配模块4提取各个工作区块的任务列表,根据任务列表中各个任务之间的关联性计算预测当前工作区块中的并发任务量;步骤4、任务预测分配模块4计算当前工作区块的并发任务量与当前工作区块中的移动充电桩的数量、电力作业机器人的数量的匹配度;若判断不匹配,则通过任务预测分配模块4从其他判断匹配的工作区块调度移动充电装置与电力作业机器人至当前判断不匹配的工作区块;若判断匹配,则通过任务预测分配模块4从当前判断匹配的工作区块调度移动充电装置与电力作业机器人至其他判断不匹配的工作区块;步骤5、在调度过程中,通过rfid模块5检测进出工作区块的电力作业机器人与移动充电桩的数量数据与位置坐标数据,任务预测分配模块4根据rfid模块5检测的进出工作区块的电力作业机器人与移动充电桩的数量数据实时反馈调节电力作业机器人与移动充电桩的调度数量,线路规划模块6根据rfid模块5检测的进出工作区块电力作业机器人与移动充电桩的位置坐标数据规划路线。
28.进一步的,所述步骤4具体包括:步骤4.1、通过任务预测分配模块4比较当前工作区块中的电力作业机器人的数量与并发任务量所需电力作业机器人的数量的关系,若当前工作区块中的电力作业机器人的数量大于并发任务量所需电力作业机器人的数量则判断富余匹配;若当前工作区块中的电力作业机器人的数量等于并发任务量所需电力作业机器人的数量则判断对等匹配;若当前工作区块中的电力作业机器人的数量小于并发任务量所需电力作业机器人的数量则判断不匹配;步骤4.2、通过任务预测分配模块4将判断富余匹配的工作区块中的电力作业机器人调度至判断不匹配的工作区块,将判断对等匹配的工作区块中的电力作业机器人调度至其他判断对等匹配的工作区块;步骤4.3、通过任务预测分配模块4比较当前工作区块中的移动充电桩的数量与并发任务量所需移动充电桩的数量的关系,若当前工作区块中的移动充电桩的数量大于并发任务量所需移动充电桩的数量则判断富余匹配;若当前工作区块中的移动充电桩的数量等于并发任务量所需移动充电桩的数量则判断对等匹配;若当前工作区块中的移动充电桩的数量小于并发任务量所需移动充电桩的数量则判断不匹配;步骤4.4、通过任务预测分配模块4将判断富余匹配的工作区块中的移动充电桩调
度至判断不匹配的工作区块,将判断对等匹配的工作区块中的移动充电桩调度至其他判断对等匹配的工作区块。
29.进一步的,若存在若干判断富余匹配的工作区块对应单个判断不匹配的工作区块,则通过rfid模块5选取距离判断不匹配的工作区块距离最短的判断富余匹配的工作区块并规划路线。如图2所示,存在三个判断富余匹配的工作区块分别为a1、a2、a3,以及单个判断不匹配的工作区块a4,三个判断富余匹配的工作区块与单个判断不匹配的工作区块之间的距离分别为s1、s2、s3,其中s1>s3>s2,按照路径最短原则,则rfid模块5选取判断富余匹配的工作区块a2与判断不匹配的工作区块a4规划路线。
30.进一步的,若存在单个判断富余匹配的工作区块对应若干判断不匹配的工作区块,则通过rfid模块5选取所需电力作业机器人数量或移动充电桩数量最少的判断不匹配的工作区块并规划路线。如图3所示,存在三个判断不匹配的工作区块分别为b1、b2、b3,以及单个判断富余匹配的工作区块b4,三个判断不匹配的工作区块所需的电力作业机器人数量或移动充电桩数量分别为k1、k2、k3,其中k1>k2>k3,则通过rfid模块5选取判断不匹配的工作区块b3与判断富余匹配的工作区块b4规划路线。
31.本实施例的其他部分与上述实施例1-5任一项相同,故不再赘述。
32.以上所述,仅是本发明的较佳实施例,并非对本发明做任何形式上的限制,凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化,均落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1