面向物流机器人集群的资源调配系统和方法与流程
本技术涉及机器人,尤其涉及一种面向物流机器人集群的资源调配系统和方法。
背景技术:
1、随着机器人技术的不断普及,在工业厂区、饭店等应用场景中已经出现了智能机器人,能够根据人的命令和内置地图,将物资或食品运往目的地。
2、集群机器人通过自组织协同控制方式使多机器人系统具备高效完成复杂任务的能力,而该类任务是单个机器人通常无法胜任的。如何通过局部、简单的相互作用,使包含大量简单机器人的系统涌现出复杂、宏观的集群行为,具备完成超出个体能力的复杂任务的集群智能,是学者关注的重点。
技术实现思路
1、有鉴于此,本技术的目的在于提出一种面向物流机器人集群的资源调配系统,本技术能够以物流机器人的集群作为管理单位,实现电力、空间、路径规划、配套等方面的资源配置。
2、基于上述目的,本技术提出了一种面向物流机器人集群的资源调配方法,包括:
3、获取物流机器人集群中每个机器人的当前剩余电量和当前剩余物流任务,所述当前剩余物流任务包括送货路径和回程路径;
4、获取每个机器人的当前地理定位,并根据所述当前地理定位计算完成所述当前剩余物流任务需要消耗的电量;如果完成所述当前剩余物流任务需要消耗的电量小于或等于当前剩余电量,则继续执行当前剩余物流任务,如果完成所述当前剩余物流任务需要消耗的电量大于当前剩余电量,则在所述当前地理定位附近搜索最近的充电站;
5、调整当前路径规划,将所述最近的充电站作为途径点,重新获取规划路径,执行重新获取的规划路径,首先到达充电站充电,然后按照剩余规划路径到达收货点卸货;
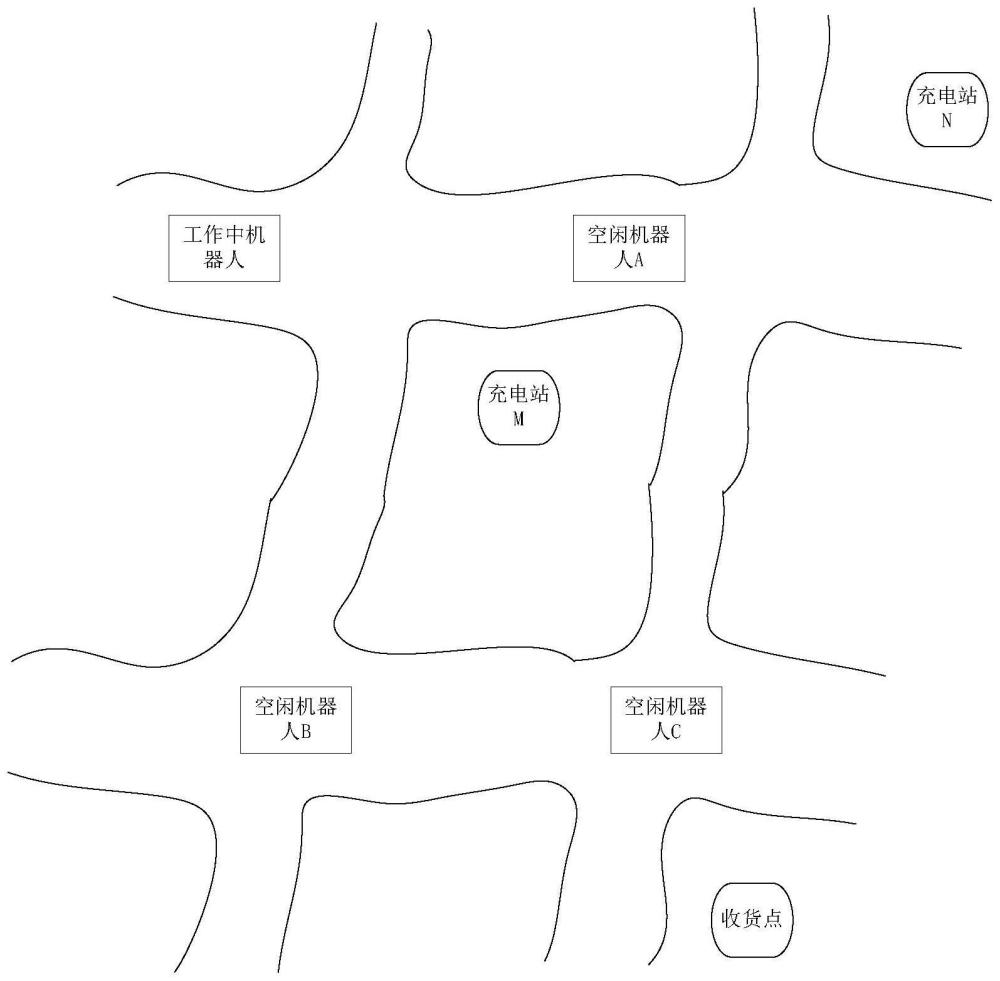
6、如果调整当前路径规划后机器人到达收货点的预计运行时间和在充电站充电时间之和超出了送货期限,则以充电站为圆心,搜索所述物流机器人集群中距离所述充电站最近的电量充足的空闲物流机器人;
7、将所述充电站的位置发送给所述空闲物流机器人,控制所述空闲物流机器人根据自身定位和所述充电站的位置执行路径规划,到达充电站并接收充电的物流机器人的货物和剩余规划路径,继续执行物流任务。
8、进一步地,所述获取物流机器人集群中每个机器人的当前剩余电量和当前剩余物流任务,所述当前剩余物流任务包括送货路径和回程路径,包括:
9、物流机器人集群中每个机器人按照预设周期获取自身的当前剩余电量信息,并发送给服务器;
10、获取物流机器人集群中每个机器人的当前地理定位和当前载货货物名单,将所述当前定位到收货点的路径作为送货路径,将收货点到集群工作站的路径作为回程路径,发送给服务器。
11、进一步地,所述获取每个机器人的当前地理定位,并根据所述当前地理定位计算完成所述当前剩余物流任务需要消耗的电量;如果完成所述当前剩余物流任务需要消耗的电量小于或等于当前剩余电量,则继续执行当前剩余物流任务,如果完成所述当前剩余物流任务需要消耗的电量大于当前剩余电量,则在所述当前地理定位附近搜索最近的充电站,包括:
12、计算所述送货路径和回程路径之和,再除以机器人单位距离的电量消耗量,得到完成所述当前剩余物流任务需要消耗的电量;
13、如果完成所述当前剩余物流任务需要消耗的电量小于或等于当前剩余电量,则继续执行当前剩余物流任务;
14、如果完成所述当前剩余物流任务需要消耗的电量大于当前剩余电量,则以所述当前地理定位为圆心,搜索附近的充电站,得到多个充电站;
15、在机器人内置地图中以当前地理定位为起点,以每个充电站为终点,进行路径规划,并计算达到每个规划路径的路程;
16、将所述规划路径的路程最小的充电站作为离机器人最近的充电站。
17、进一步地,所述调整当前路径规划,将所述最近的充电站作为途径点,重新获取规划路径,执行重新获取的规划路径,首先到达充电站充电,然后按照剩余规划路径到达收货点卸货,包括:
18、调整当前路径规划,将所述最近的充电站作为途径点;
19、以当前地理定位为起点,以所述最近的充电站为途径点,以收货点为重点,重新获取规划路径;
20、执行重新获取的规划路径,到达充电站充电;
21、当完成所述当前剩余物流任务需要消耗的电量小于或等于当前剩余电量时,充电完成,并按照剩余规划路径到达收货点卸货。
22、进一步地,所述如果调整当前路径规划后机器人到达收货点的预计运行时间和在充电站充电时间之和超出了送货期限,则以充电站为圆心,搜索所述物流机器人集群中距离所述充电站最近的电量充足的空闲物流机器人,包括:
23、根据机器人的充电速率和当前剩余电量,计算当前剩余电量到达完成所述当前剩余物流任务需要消耗的电量的时间,作为在充电站充电时间;
24、根据当前地理定位到充电站的路径长度、充电站到收货点的路径长度和机器人的运行速度,计算调整当前路径规划后机器人到达收货点的预计运行时间;
25、计算当前时间加上所述预计运行时间和在充电站充电时间,作为预计收货时间;
26、如果所述预计收货时间超出了送货期限,则以充电站为圆心,搜索所述物流机器人集群中距离所述充电站最近的电量充足的空闲物流机器人,其中所述电量充足是指剩余电量超过到达充电站和完成所述当前剩余物流任务需要消耗的电量。
27、进一步地,所述将所述充电站的位置发送给所述空闲物流机器人,控制所述空闲物流机器人根据自身定位和所述充电站的位置执行路径规划,到达充电站并接收充电的物流机器人的货物和剩余规划路径,继续执行物流任务,包括:
28、将所述充电站的位置发送给所述空闲物流机器人;
29、控制所述空闲物流机器人根据自身定位和所述充电站的位置进行第一路径规划;
30、控制所述空闲物流机器人按照第一规划路径运行并到达充电站;
31、接收充电的物流机器人当前承载的货物,将收货点位置发送给接收货物后的物流机器人,根据充电站位置和收货点位置进行第二路径规划;
32、控制所述空闲物流机器人按照第二规划路径运行并到达收货点。
33、进一步地,如果所述充电站周围的多个所述空闲物流机器人的剩余电量大于当前物流机器人的剩余电量,但是均小于到达充电站和完成所述当前剩余物流任务需要消耗的电量,则选择剩余电量最多的空闲物流机器人作为预案机器人,控制所述预案机器人到达充电站充电后,接收充电的物流机器人的货物和剩余规划路径,继续执行物流任务。
34、基于上述目的,本技术还提出了一种面向物流机器人集群的资源调配系统,包括:
35、剩余电量和任务获取模块,用于获取物流机器人集群中每个机器人的当前剩余电量和当前剩余物流任务,所述当前剩余物流任务包括送货路径和回程路径;
36、充电判断模块,用于获取每个机器人的当前地理定位,并根据所述当前地理定位计算完成所述当前剩余物流任务需要消耗的电量;如果完成所述当前剩余物流任务需要消耗的电量小于或等于当前剩余电量,则继续执行当前剩余物流任务,如果完成所述当前剩余物流任务需要消耗的电量大于当前剩余电量,则在所述当前地理定位附近搜索最近的充电站;
37、路径重新规划模块,用于调整当前路径规划,将所述最近的充电站作为途径点,重新获取规划路径,执行重新获取的规划路径,首先到达充电站充电,然后按照剩余规划路径到达收货点卸货;
38、超期预案模块,用于如果调整当前路径规划后机器人到达收货点的预计运行时间和在充电站充电时间之和超出了送货期限,则以充电站为圆心,搜索所述物流机器人集群中距离所述充电站最近的电量充足的空闲物流机器人;
39、空闲机器人模块,用于将所述充电站的位置发送给所述空闲物流机器人,控制所述空闲物流机器人根据自身定位和所述充电站的位置执行路径规划,到达充电站并接收充电的物流机器人的货物和剩余规划路径,继续执行物流任务。
40、总的来说,本技术的优势及给用户带来的体验在于:
41、本技术能够以物流机器人的集群作为管理单位,实现电力、空间、路径规划、配套等方面的资源配置。在机器人电量不足以完成后续运输任务时,及时寻找附近充电站进行充电。在充电耽误送货期限时,能够及时调配附近的物流机器人接续运输,在时限内保证物流任务的完成。
- 还没有人留言评论。精彩留言会获得点赞!