一种移动风场环境中弹性飞机风场气动载荷的确定方法与流程
1.本技术属于弹性飞机动载荷设计技术领域,特别涉及一种移动风场环境中弹性飞机风场气动载荷的确定方法。
背景技术:
2.现代大型飞机结构的柔度不断降低,弹性结构模态振动对飞机的动响应影响有时候是不可忽略的。移动风场与传统风场不一样,移动风场以音速传播、且携带了更强的扰动能量,移动风场有可能激起弹性模态的振动,进而影响飞机的整体运动特性。
3.目前,已经有关于移动风场环境中刚性飞机气动载荷的确定方法,如申请号为202110680212.9的中国发明专利中,该专利公开了一种用于移动风场环境中飞行器动响应的确定方法。但是对于弹性飞机,普通阵风对飞机的传统非定常激气动力计算方法不能考虑风场的传播速度和水平风速,且不能处理风场从飞机后方追击而来的过程。而移动风场同时具有水平风速、垂直风速的空间特点,且以超音速/音速传播,因此需要建立移动风场环境中的弹性飞机气动载荷的确定方法,并建立移动风场环境中的弹性飞机动响应的确定方法。
技术实现要素:
4.为了解决上述技术问题至少之一,本技术提供了一种移动风场环境中弹性飞机风场气动载荷的确定方法,可以考虑移动风场包围飞机过程对气动载荷的影响,以满足工程中的设计需求,用于移动风场从飞机尾部追击、作用过程中弹性飞机所受风场气动载荷的确定。
5.本技术移动风场环境中弹性飞机风场气动载荷的确定方法,主要包括:
6.步骤s1、基于飞行马赫数、飞机动力学模态数据及非定常气动力模型确定弹性飞机的气动力影响系数矩阵;
7.步骤s2、在任一仿真时刻,确定风速、飞机速压以及弹性飞机气动网格的下洗矩阵;
8.步骤s3、根据所述气动力影响系数矩阵及所述弹性飞机气动网格的下洗矩阵,计算频域中的风场气动力系数;
9.步骤s4、基于所述飞机速压及所述频域中的风场气动力系数,确定时域中的风场气动力系数,返回步骤s2,更新仿真时刻。
10.优选的是,步骤s1进一步包括:
11.步骤s11、确定移动风场相对于弹性飞机的初始作用位置;
12.步骤s12、确定当前海拔高度上的音速、大气密度及飞机的真空速;
13.步骤s13、计算移动风场从飞机后方包围飞机的包围速度;
14.步骤s14、对弹性飞机的有限元模型进行动力学求解,获得模态数据;
15.步骤s15、基于弹性飞机的非定常气动力模型,计算任意第i个气动网格下洗控制
点到移动风场初始位置的时间差;
16.步骤s16、基于气动弹性力学中的亚音速偶极子格网法计算弹性飞机的气动力影响系数矩阵。
17.优选的是,步骤s2进一步包括:
18.步骤s21、确定当前的仿真时刻参数;
19.步骤s22、基于移动风场初始的水平风速及垂向风速,插值出当前的仿真时刻的水平风速与垂向风速;
20.步骤s23、计算飞机的速压;
21.步骤s24、对于任意第i个气动网格下洗控制点,确定当前的仿真时刻各气动网格下洗控制点所受到的垂向风速;
22.步骤s25、确定各气动网格下洗控制点处诱导的下洗;
23.步骤s26、将下洗公式中的分子分母拆开,并将分母部分与所述速压组合,以修正飞机速压;
24.步骤s27、将所述分子部分进行fourier变换;
25.步骤s28、将所有气动网格在频域上受到的垂向移动速度整理为向量形式,形成弹性飞机气动网格的下洗矩阵。
26.优选的是,步骤s3进一步包括:
27.步骤s31、根据所述气动力影响系数矩阵及所述弹性飞机气动网格的下洗矩阵,采用亚音速偶极子格网法计算所有气动网格上的压力系数;
28.步骤s32、确定频域中的移动风场直接引起的广义气动力系数向量。
29.优选的是,步骤s32进一步包括:
30.基于所述飞机动力学模态数据确定所有气动网格下洗控制点处的模态矩阵;
31.基于所述非定常气动力模型确定所有气动网格的面积矩阵;
32.基于所述模态矩阵、面积矩阵及所述压力系数确定所述广义气动力系数向量。
33.优选的是,步骤s4进一步包括:
34.步骤s41、利用fourier逆变换将广义气动力系数向量转换为移动风场对飞机的时域广义激励力系数向量;
35.步骤s42、基于修正后的飞机速压及所述时域广义激励力系数向量,计算移动风场对飞机的时域广义气动载荷向量,即所述时域中的风场气动力系数。
36.本技术通过引入每个网格的时间滞后项,计算了移动风场从尾部作用于飞机过程中对每个网格的不同下洗影响,是一种考虑了移动风场包围弹性飞机过程对气动载荷影响的计算方法,根据上述方法可以更好地模拟移动风场从飞机尾部作用过程中的弹性飞机气动载荷变化,满足了工程中的设计需求。
附图说明
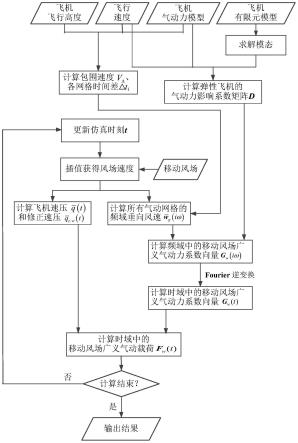
37.图1是本技术移动风场环境中弹性飞机风场气动载荷的确定方法的一实施方式的流程图。
38.图2是本技术一优选实施例的1-cos型移动风场引起的机翼气动弯矩示意图。
39.图3是本技术一优选实施例的1-cos型移动风场引起的平尾气动弯矩示意图。
具体实施方式
40.为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施方式中的附图,对本技术实施方式中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。所描述的实施方式是本技术一部分实施方式,而不是全部的实施方式。下面通过参考附图描述的实施方式是示例性的,旨在用于解释本技术,而不能理解为对本技术的限制。基于本技术中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本技术保护的范围。下面结合附图对本技术的实施方式进行详细说明。
41.本技术移动风场环境中弹性飞机风场气动载荷的确定方法,如图1所示,主要包括:
42.步骤s1、基于飞行马赫数、飞机动力学模态数据及非定常气动力模型确定弹性飞机的气动力影响系数矩阵;
43.步骤s2、在任一仿真时刻,确定风速、飞机速压以及弹性飞机气动网格的下洗矩阵;
44.步骤s3、根据所述气动力影响系数矩阵及所述弹性飞机气动网格的下洗矩阵,计算频域中的风场气动力系数;
45.步骤s4、基于所述飞机速压及所述频域中的风场气动力系数,确定时域中的风场气动力系数;
46.步骤s5、基于所述时域中的风场气动力系数,计算飞机动响应。
47.在一些可选实施方式中,步骤s1主要包括:
48.s11,给出移动风场的水平风速u
x
、垂向风速uz,二者随时间变化;给出移动风场相对于飞机的初始作用位置x0;
49.s12,给出飞行海拔高度h、飞行速度ma,计算当前海拔高度上的音速vs和大气密度ρ、飞机的真空速v;
50.s13,计算移动风场从飞机后方的包围速度v
△
,如公式(1)所示:
[0051]v△
=v
s-v
ꢀꢀꢀꢀ
(1);
[0052]
s14,对飞机的有限元模型进行动力学求解,获得模态数据;
[0053]
s15,建立飞机的非定常气动力模型,并计算任意第i个气动网格下洗控制点xi到移动风场初始位置x0的时间差
△
ti为:
[0054][0055]
s16,根据步骤s12中的飞行马赫数ma、步骤s14中的模态数据、步骤s15中的非定常气动力模型,采用传统气动弹性力学中的亚音速偶极子格网法计算弹性飞机的气动力影响系数矩阵d。
[0056]
在一些可选实施方式中,如图2所示,步骤s2主要包括:
[0057]
s21,对于任一仿真时刻t;
[0058]
s22,根据步骤s11中的水平风速u
x
、垂向风速uz,插值出时刻t的水平风速u
x
(t)、垂向风速uz(t);
[0059]
s23,根据步骤s12中的大气密度ρ、飞机的真空速v、步骤s22中的水平风速u
x
(t)、
垂向风速uz(t),计算飞机的速压为:
[0060][0061]
s24,对于任意第i个气动网格下洗控制点,根据步骤s11中的垂向风速uz和步骤s15中的时间差
△
ti,插值出仿真时刻t时该下洗控制点所受到的垂向风速u
zi
(t)为:
[0062]uzi
(t)=uz(t+
△
ti)
ꢀꢀꢀꢀ
(4);
[0063]
s25,仿真时刻t时,移动风场在任意第i个气动网格下洗控制点处诱导的下洗w
gi
(t)计算如公式(5)所示:
[0064][0065]
s26,将公式(5)的分子与分母拆开,并且将分母与公式(3)组合(这里主要是对公式(3)中的速压进行修正,在后续步骤s42中用到),分别整理为公式(6)、公式(7):
[0066][0067][0068]
s27,将公式(6)进行fourier变换,如公式(8)所示:
[0069][0070]
其中,i为虚数;ω为振动圆频率;l为参考长度;k为减缩频率,其计算如公式(9)所示:
[0071][0072]
s28,将所有气动网格在频域上受到的垂向移动速度整理为向量形式,如公式(10)所示:
[0073][0074]
其中,m为气动网格的总数目。
[0075]
在一些可选实施方式中,步骤s3主要包括:
[0076]
s31,根据步骤s16中的气动力影响系数矩阵d、步骤s28中的垂向移动风速向量采用亚音速偶极子格网法计算所有气动网格上的压力系数
△cp
为:
[0077][0078]
s32,根据步骤s14中的模态数据可以计算出所有气动网格下洗控制点处的模态矩阵φh,根据步骤s15中的飞机非定常气动力模型可以计算出所有气动网格的面积矩阵s,根据φh、s和步骤s31中的压力系数
△cp
可以计算频域中的移动风场直接引起的广义气动力系数向量gw(iω)为:
[0079][0080]
其中,为广义非定常气动力系数矩阵。
[0081]
在一些可选实施方式中,步骤s4主要包括:
[0082]
s41,根据步骤s32中的广义气动力系数向量gw(iω),利用fourier逆变换技术,得到移动风场对飞机的时域广义激励力系数向量gw(t)为:
[0083][0084]
s42,根据步骤s26中修正过的飞机速压步骤s41中的时域广义激励力系数向量gw(t),计算移动风场对飞机的时域广义气动载荷向量fw(t)为:
[0085][0086]
如图2及图3所示,分别给出了尾追1-cos型移动风场引起的机翼气动弯矩和平尾气动弯矩的仿真结果,可以看出,本技术在步骤s15、步骤s25、步骤s28中,通过引入每个网格的时间滞后项,计算了移动风场从尾部作用于飞机过程中对每个网格的不同下洗影响,是一种考虑了移动风场包围弹性飞机过程对气动载荷影响的计算方法,根据上述方法可以更好地模拟移动风场从飞机尾部作用过程中的弹性飞机气动载荷变化,满足了工程中的设计需求。
[0087]
以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1