基于无人机的建筑缺陷检测方法、装置及电子设备
1.本发明涉及测绘技术和缺陷检测技术领域,具体涉及一种基于无人机精细化红外建模的建筑缺陷检测方法。
背景技术:
2.随着经济飞速发展以及科学技术稳步提升,我国城市房屋建设大力发展,然而近些年来,建筑外墙围护结构出现脱落、屋面防水层出现裂缝缺陷等等事件,不仅给城市形象带来破坏,还给社会安定造成严重的影响,因此如何便捷、快速、准确地检测建筑外部缺陷成为了房屋缺陷检测过程中的重要需求。
3.目前建筑外部缺陷检测过程中常常采用以下方法:
4.(1)人工目视巡检具有巡检效率低,无法精准定位的缺点;
5.(2)超声波检测方法无法对墙面高低、角度不一致情况下很好地进行检测,设备灵活度和实用性较差,对数量较多的建筑缺陷检测时效率低下;
6.(3)无人机拍摄可见光照片检测方法,数据处理漏检率高,无法精确定位,难以对待测物体进行分析。
技术实现要素:
7.本发明所要解决的技术问题是:为了克服现有技术中存在的不足之处,提供了一种基于无人机精细化红外建模的建筑缺陷检测方法,通过建立待测建筑的粗略三维模型,规划无人机精细化航线,采集高精度红外图像进行精细化三维建模,实现建筑外部缺陷的快速精确定位检测。
8.本发明为解决以上技术问题采用以下技术方案:
9.本发明提出一种基于无人机精细化红外建模的建筑缺陷检测方法,所述方法包括如下步骤:
10.s1,规划测区粗略模型巡航路径;具体为:根据已有gps控制点位布设像控点,依据粗模要求的精度和测区范围的大小均匀布设像控点的数量和位置,其次根据申请的空域时间和范围规划粗略三维模型规划巡航路径,保证影像的航向重叠、旁向重叠、分辨率符合粗模要求。
11.s2,采用同时搭载变焦和红外相机的无人机根据粗略模型巡航路径采集带pos数据的可见光和红外图像数据,同时飞控系统赋予每张热红外图像对应的pos数据,包括:经纬度、海拔、高度、飞行方向、飞行姿态。
12.s3,基于可见光图像完成粗略三维模型重建;具体过程依次包括:通过可见光图像数据下载及图像预处理、空中三角测量控制点加密、密集点云生成及模型构建、纹理切片及自动映射、三维模型重建。
13.s4,基于粗略三维模型制定精细化巡航路径。
14.s5,根据精细化巡航路径采集红外图像,建立红外精细化三维模型。
15.s6,结合红外三维渲染模型完成建筑缺陷检测:根据生成的红外精细化三维渲染模型,利用颜色差异显示温度差异,可以直观得到热损失显著位置,从而可以完成建筑外部缺陷定位的检测任务。
16.进一步的,本发明还提出一种基于无人机红外三维建模的建筑外部缺陷检测装置,包括:
17.路径规划模块,用于规划测区粗略模型巡航路径;
18.图像采集模块,用于控制无人机按粗略模型巡航路径采集建筑外部带pos数据的红外图像;
19.模型重建模块,用于利用带pos数据的红外图像完成建筑外部粗略三维模型重建;基于粗略三维模型制定精细化巡航路径,根据精细化巡航路径采集红外图像,建立红外精细化三维模型;
20.缺陷检测模块,用于结合三维渲染模型完成建筑外部缺陷检测。
21.最后,本发明提出一种电子设备,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明所述的基于无人机红外三维建模的建筑外部缺陷检测方法。
22.与现有技术相比,本发明采用以上技术方案的有益效果是:
23.本发明结合无人机精细化巡检、基于红外图像的三维重建技术,可以实现对大范围内的房屋外部缺陷精确定位检测,提高了自动化检测水平与效率;能够以直观地方式显示房屋外部缺陷,对构建智能化,自动化建筑外部损伤检测平台提供帮助;在粗略三维模型的基础上制定精细化巡航路线,提高了红外模型质量与精度;可以进一步与机器学习结合,对通过处理图片信息自动评估目标对象状态提供基础。
附图说明
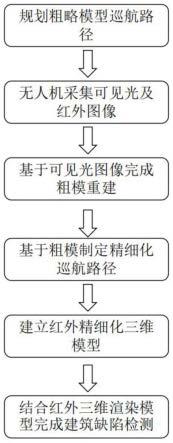
24.图1为本发明的基于无人机红外三维建模的建筑外部缺陷检测方法的流程图。
25.图2为本发明的精细化航线制定示意图。
26.图3为本发明的三维模型重建流程图。
具体实施方式
27.下面详细描述本发明的实施方式,所述实施方式的示例在附图中示出,以下结合附图对本发明作详细说明,但不应以此限制本发明的保护范围。
28.如图1所示,本发明提出一种基于无人机精细化红外建模的建筑缺陷检测方法,所述方法包括如下步骤:
29.s1,规划测区粗略模型巡航路径;
30.s2,无人机采集带pos数据的图像;
31.s3,基于可见光图像完成粗略三维模型重建;
32.s4,基于粗略三维模型制定精细化巡航路径;
33.s5,采集红外图像建立红外精细化三维模型;
34.s6,结合红外三维渲染模型完成建筑缺陷检测。
35.根据生成的精细化三维渲染模型,利用颜色差异显示温度差异,可以直观得到热损失显著位置,从而可以完成建筑外部缺陷定位的检测任务。
36.为了进一步说明本发明的上述步骤,通过下面具体的实施例进行说明,上述的s1中,具体包括:
37.根据已有gps控制点位布设像控点,依据粗模要求的精度和测区范围的大小均匀布设像控点的数量和位置,其次根据申请的空域时间和范围规划粗略三维模型规划五向飞行或环形航线,保证影像的航向重叠、旁向重叠、分辨率符合粗模要求。
38.上述的s2中,具体包括:
39.搭载变焦和红外相机的无人机沿粗略三维模型规划巡航路径同时采集待检测建筑的可见光和红外图像数据,同时飞控系统赋予每张热红外图像对应的pos数据,包括:经纬度、海拔、高度、飞行方向、飞行姿态。
40.上述的s3中,具体包括:
41.通过可见光图像数据下载及图像预处理、空中三角测量控制点加密、密集点云生成及模型构建、纹理切片及自动映射、三维模型重建等步骤,得到粗略三维模型。
42.上述的s4中,具体包括:
43.如图2所示,基于带有地理位置信息的粗略三维模型,在粗略三维模型上标记特征点,特征点标记为q1,q2,q3,
…
,qk,
…
,qm,(qk(xk,yk,zk),k∈{1,2,3,
…
,m}),特征点依次连接为特征面,在选取划分的特征面上内插航点,拓展生成精细化巡航路径。将特征点q1设为航点q1在q1q2内插航点的坐标,相机传感器尺寸为b
×
hmm,焦距为dmm,物距为dmm,画面拍摄范围计为b
×
hmm,航向重叠率为ξ,旁向重叠率为η。则航向距离l1,旁向距离l2分别为:
[0044][0045][0046]
则同航向上qi坐标为:
[0047][0048]
下一相邻航线首个航点q
i+1
坐标为:
[0049][0050]
其中,i=1,2,3...,n,n代表内插航点数。
[0051]
上述的s5中,参考图3所示,具体包括步骤:
[0052]
s5-1红外图像具有信噪比较低,受太阳辐射因素一定影响的特点,所以需要对所述红外图像进行中值滤波去噪处理;
[0053]
s5-2使用surf算法,搜索所有尺度空间上的图像,构建hessian矩阵来提取明显亮度变化的图像特征点;具体如下:
[0054][0055]
其中,i代表图像,x、y分别代表图像的横、纵坐标。
[0056]
s5-3使用knn算法完成特征点匹配,在匹配的时候选择k个和特征点最相似的点,如果这k个点之间的区别足够大,则选择最相似的那个点作为匹配点,通常选择k=2;
[0057]
s5-4根据匹配结果进行空间三角计算,生成一体化的三维模型;
[0058]
s5-5完成纹理映射,模型修改。
[0059]
本发明还提出一种基于无人机红外三维建模的建筑外部缺陷检测装置,包括:
[0060]
路径规划模块,用于规划测区粗略模型巡航路径;
[0061]
图像采集模块,用于控制无人机按粗略模型巡航路径采集建筑外部带pos数据的红外图像;
[0062]
模型重建模块,用于利用带pos数据的红外图像完成建筑外部粗略三维模型重建;基于粗略三维模型制定精细化巡航路径,根据精细化巡航路径采集红外图像,建立红外精细化三维模型;
[0063]
缺陷检测模块,用于结合三维渲染模型完成建筑外部缺陷检测。
[0064]
需要说明的是,本技术实施例装置的描述,与上述方法实施例的描述是类似的,具有同方法实施例相似的有益效果,因此不做赘述。
[0065]
最后,本发明提出一种电子设备,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明所述的基于无人机红外三维建模的建筑外部缺陷检测方法。
[0066]
上述产品可执行本发明实施例所提供的方法,具备执行方法相应的功能模块和有益效果。未在本实施例中详尽描述的技术细节,可参见本发明实施例所提供的方法。
[0067]
本领域内的技术人员应明白,本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0068]
以上所述仅是本发明的优选实施方式,本发明方案所公开的技术手段不仅限于上述实施方式所公开的技术手段,还包括由以上技术特征任意组合所组成的技术方案。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1