一种大型光电类产品振动控制传感器布点位计算方法与流程
本申请涉及振动试验的领域,尤其是涉及一种大型光电类产品振动控制传感器布点位计算方法。
背景技术:
1、大型光电类产品振动夹具具有尺寸大(远大于振动台动圈尺寸)、重量重、开口多、结构复杂的特点。其在进行振动试验时,基本均采用多点平均控制的振动控制方法。传统的控制传感器布点方法是以产品与夹具连接位置为主要选点原则,通过经验和反复实测进行调整,以保证平均控制谱与试验参考谱基本一致。这样的布点,虽然平均控制谱与试验参考谱基本一致,但各控制点振动控制精度往往存在差异,这就导致了产品各振动输入部位响应与试验参考谱不一致且各振动输入部位响应也不一样情况的出现,从而不利于产品在振动试验中的故障析出和正确顺利通过试验。
技术实现思路
1、有鉴于此,本申请提供一种大型光电类产品振动控制传感器布点位计算方法,解决了现有技术中的问题,达到更精准、更均衡的振动控制,以保证大型光电类产品在振动应力下的故障析出和振动试验的正确顺利通过。
2、本申请提供的一种大型光电类产品振动控制传感器布点位计算方法采用如下的技术方案:
3、一种大型光电类产品振动控制传感器布点位计算方法,包括:
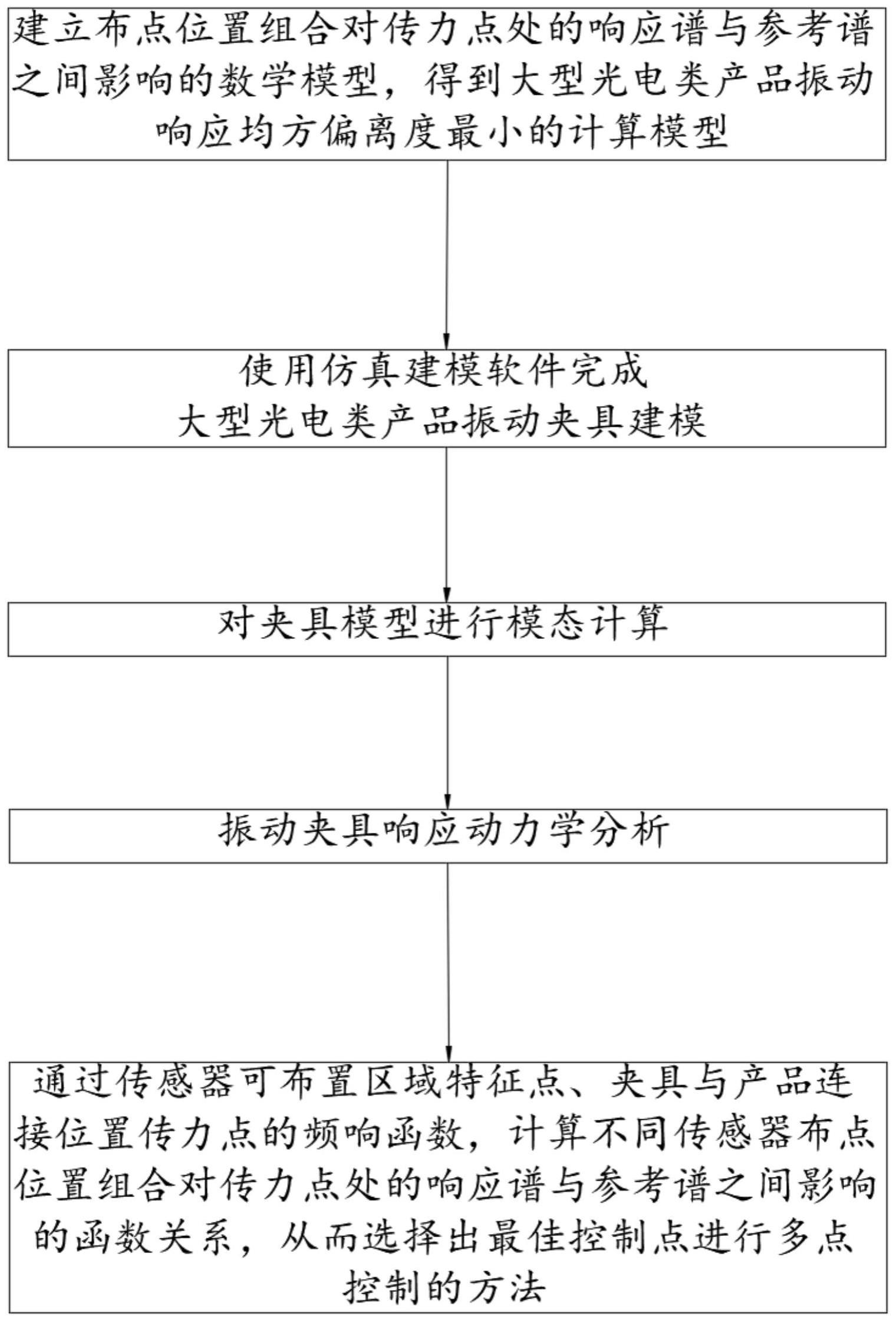
4、步骤1,建立布点位置组合对传力点处的响应谱与参考谱之间影响的数学模型,得到大型光电类产品振动响应均方偏离度最小的计算模型;
5、步骤2,使用仿真建模软件完成大型光电类产品振动夹具建模;
6、步骤3,对夹具模型进行模态计算;
7、步骤4,振动夹具响应动力学分析;
8、步骤5,通过传感器可布置区域特征点、夹具与产品连接位置传力点的频响函数,计算不同传感器布点位置组合对传力点处的响应谱与参考谱之间影响的函数关系,从而选择出最佳控制点进行多点控制的方法。
9、可选的,建立布点位置组合对传力点处的响应谱与参考谱之间影响的数学模型包括:设定振动台传递给夹具的响应点位于振动台中心位置的o点,夹具与被试品的安装部位为di(i=1,2,…m),传感器安装位置为cj(j=1,2,…n);
10、大型光电类产品振动响应均方偏离度最小的计算模型:
11、
12、cj∈sc
13、式中:
14、分别为频率fp上di、cj相对于o点加速度功率谱密度传递函数,φ(fp)参考谱为频率fp上参考谱加速度功率谱密度,dv为频率段下限值,uv为频率段上限值。
15、可选的,振动夹具响应动力学分析包括:在对振动夹具模型进行有限元网格划分时应保证加强筋等梁单元至少2层网格,并设置一个虚拟点0(即为假定振动台传递给夹具的响应点位于振动台中心位置的0点),0点与夹具使用rbe2刚性连接。对完成网格划分、连接设置的夹具模型新建仿真分析,在0点处施加固定约束并建立x、y、z方向的强迫运动作用位置约束。
16、可选的,夹具模型进行模态计算过程中,选的模态阶数在50阶以上;
17、模态计算后的夹具模型建立响应仿真,设置粘滞阻尼(%viscous)值;
18、新建振动激励事件,设定振动类型、频率间距类型、附加频谱线数和频点数,新建平移节点的激励,选择强迫运动约束方向并在函数管理器中输入振动激励谱。
19、可选的,所述步骤5中,通过rms云图评估对夹具外表面进行分析,通过不同颜色区域选择传感器可布置各区域的特征点。
20、可选的,所述步骤5中,对夹具上产品的安装部位传力点、传感器可布置区域特征点处的频响函数进行计算,计算完成后,导出包含所有节点编号、频率点、加速度谱密度的日志文件。
21、可选的,7所述步骤5中,在计算程序中分别导入传力点日志文件和特征点日志文件,程序对导入的特征点求组合,并把组合后的数据保存,将特征点组合的数据按频率点与传力点数据进行交叉匹配,并将匹配生成的数据存入数据库,计算所有节点组的目标函数值并将计算出的目标函数值从小到大进行排序,显示在结果窗口中,目标函数最小值的节点组合即为传感器最优布点位置组合。
22、综上所述,本申请包括以下有益技术效果:
23、本申请为提高大型光电类产品振动试验各控制点控制精度及各振动输入部位的振动均匀性,开展基于多点控制情况下传感器布置优化计算模型的振动控制研究,期望达到更精准、更均衡的振动控制,以保证大型光电类产品在振动应力下的故障析出和振动试验的正确顺利通过。
技术特征:
1.一种大型光电类产品振动控制传感器布点位计算方法,其特征在于,包括:
2.根据权利要求1所述的大型光电类产品振动控制传感器布点位计算方法,其特征在于,建立布点位置组合对传力点处的响应谱与参考谱之间影响的数学模型包括:设定振动台传递给夹具的响应点位于振动台中心位置的o点,夹具与被试品的安装部位为di(i=1,2,…m),传感器安装位置为cj(j=1,2,…n);
3.根据权利要求1所述的大型光电类产品振动控制传感器布点位计算方法,其特征在于,振动夹具响应动力学分析包括:在对振动夹具模型进行有限元网格划分时应保证加强筋等梁单元至少2层网格,并设置一个虚拟点o(即为假定振动台传递给夹具的响应点位于振动台中心位置的o点),o点与夹具使用rbe2刚性连接。对完成网格划分、连接设置的夹具模型新建仿真分析,在o点处施加固定约束并建立x、y、z方向的强迫运动作用位置约束。
4.根据权利要求1所述的大型光电类产品振动控制传感器布点位计算方法,其特征在于,夹具模型进行模态计算过程中,选的模态阶数在50阶以上;
5.根据权利要求1所述的大型光电类产品振动控制传感器布点位计算方法,其特征在于,所述步骤5中,通过rms云图评估对夹具外表面进行分析,通过不同颜色区域选择传感器可布置各区域的特征点。
6.根据权利要求5所述的大型光电类产品振动控制传感器布点位计算方法,其特征在于,所述步骤5中,对夹具上产品的安装部位传力点、传感器可布置区域特征点处的频响函数进行计算,计算完成后,导出包含所有节点编号、频率点、加速度谱密度的日志文件。
7.根据权利要求6所述的大型光电类产品振动控制传感器布点位计算方法,其特征在于,所述步骤5中,在计算程序中分别导入传力点日志文件和特征点日志文件,程序对导入的特征点求组合,并把组合后的数据保存,将特征点组合的数据按频率点与传力点数据进行交叉匹配,并将匹配生成的数据存入数据库,计算所有节点组的目标函数值并将计算出的目标函数值从小到大进行排序,显示在结果窗口中,目标函数最小值的节点组合即为传感器最优布点位置组合。
技术总结
本申请提供了一种大型光电类产品振动控制传感器布点位计算方法,属于振动试验技术领域,具体包括建立布点位置组合对传力点处的响应谱与参考谱之间影响的数学模型,得到大型光电类产品振动响应均方偏离度最小的计算模型;使用仿真建模软件完成大型光电类产品振动夹具建模;对夹具模型进行模态计算;振动夹具响应动力学分析;通过传感器可布置区域特征点、夹具与产品连接位置传力点的频响函数,计算不同传感器布点位置组合对传力点处的响应谱与参考谱之间影响的函数关系,从而选择出最佳控制点进行多点控制的方法。通过本申请的处理方案,保证大型光电类产品在振动应力下的故障析出和振动试验的正确顺利通过。
技术研发人员:万翔,王军义,张辰
受保护的技术使用者:中国航空工业集团公司洛阳电光设备研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!