一种用于地面无人车的局部静态环境矢量化描述方法与流程
1.本发明涉及基于地面无人车的环境感知领域,尤其是涉及一种用于地面无人车的局部静态环境矢量化描述方法。
背景技术:
2.地面无人车作为当前的一个重要研究领域,涉及众多应用方向,包括无人驾驶、智能巡检以及军事安防等。在实际应用中,基于各类外部感知传感器实现的鲁棒障碍物检测是无人地面平台在执行各种复杂任务过程中不可或缺的功能。根据障碍物的动静态属性,一般可将其分为动态障碍物和静态障碍物两类。对于前者,主要包括车辆、行人和自行车等,在过去的一段时间内,动态障碍物检测取得了重要的进展,尤其是基于深度学习的目标检测方法。另一方面,对于复杂环境中的静态障碍物,不少学者受到机器人领域的启发,提出了多种通用障碍物检测方法。
3.尽管上述方法在地面无人车相关领域取得了很大进展,但局部静态环境的鲁棒感知还未成熟。特别是对于复杂环境中的各类静态障碍物而言,基于深度学习的方法无法实现鲁棒的障碍物检测。另一方面,利用基于占据栅格地图实现的通用障碍物检测方法可以克服上述挑战,但是考虑到之后无人车的运动规划需求,传统占用栅格地图存在占用大量内存和增加计算成本的缺点。
技术实现要素:
4.本发明的目的在于针对现有技术的不足,提供一种用于地面无人车的局部静态环境矢量化描述方法。
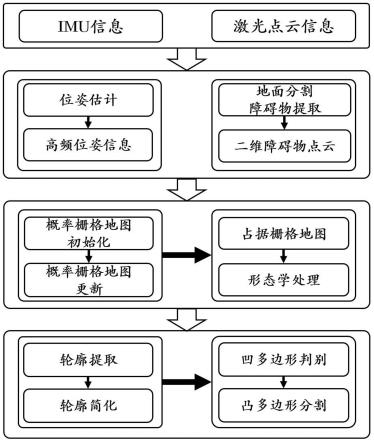
5.本发明的目的是通过以下技术方案来实现的:一种用于地面无人车的局部静态环境矢量化描述方法,包括如下步骤:(1)利用地面分割处理由多线激光传感器得到的激光点云信息,得到当前激光扫描帧中每个激光点所对应的属性以及离地高度;(2)根据步骤(1)得到的每个激光点所对应的属性以及离地高度,进行障碍物点云提取,并将三维障碍物点云转换为二维障碍物点云;(3)根据点云时间戳获取地面无人车的位姿信息,根据该位姿信息和步骤(2)得到的二维障碍物点云构造局部概率栅格地图;(4)根据步骤(3)得到的概率栅格地图,通过二值化和形态学操作,得到描述占据信息的二值图;(5)根据步骤(4)得到的二值图,进行障碍物轮廓提取与凸多边形分割。
6.进一步地,所述步骤(1)包括如下子步骤:(1.1)将所有激光点云按照给定角度分辨率α和距离分辨率β,投影到扇形栅格地图;(1.2)确定每个扇形栅格内z值最小的激光点,并利用区域生长方法完成地面提
取,得面到地表达式;(1.3)通过计算所有激光点与所在区域地面表达式之间的高度差,赋予是否为地面的属性,并得到对应激光点的离地高度。
7.进一步地,所述步骤(2)包括如下子步骤:(2.1)首先根据地面分割得到的点云和离地高度,去除地面点和高空点得到有效的三维障碍物点云;(2.2)按照激光传感器固有的角度分辨率γ生成个障碍物点队列(其中为向上取整运算),依次将所有障碍物点存入对应的障碍物点队列;(2.3)最后利用排序算法选取最近的障碍物点,得到最终的二维障碍物点云。
8.进一步地,所述步骤(3)包括如下子步骤:(3.1)在概率栅格地图初始化阶段,以当前车体中心为原点,根据给定偏移量确定地图中心位置,通过光线跟踪模型进行非占据区域和占据区域概率更新;(3.2)在局部概率栅格地图维护阶段,首先获取当前车体中心坐标以及上一时刻局部栅格地图所在中心位置,之后进行地图平移并保留重叠区域,最后通过光线跟踪模型分别更新非占据区域和占据区域。
9.进一步地,所述步骤(4)包括如下子步骤:(4.1)将概率栅格地图通过二值化操作转换为二值图;(4.2)利用图像形态学操作方法—闭运算,闭合存在间隙的区域,有效去除原有栅格地图存在的噪声。
10.进一步地,所述步骤(5)包括如下子步骤:(5.1)通过边缘提取方法,获取占据区域的外轮廓边缘信息,并利用iepf算法平滑障碍物轮廓边缘;(5.2)对每个障碍物轮廓进行凹多边形判别;(5.3)若为凹多边形,则对该障碍物轮廓进一步分割,利用计算机图形学向量方法将当前凹多边形分割为多个凸多边形。
11.本发明的技术方案概括为:本发明提出了一种鲁棒且紧凑的地面无人车局部静态环境矢量化描述方法。首先利用地面分割获得激光点云和离地高度,并进一步生成二维障碍物点云。最后,结合概率栅格地图在多帧融合以及凸多边形在紧凑描述环境中的优势,提出了一种新颖的局部静态环境下的通用障碍物检测方法。本发明为地面无人车领域通用障碍物的检测提供了切实可行的解决方案。
12.本发明的有益效果是:本发明所提出的局部静态环境描述方法,算法逻辑简单清晰,实施方案灵活多变,可以达到鲁棒检测静态障碍物且紧凑描述环境的目的。结合概率栅格地图在多帧融合中的优势,达到鲁棒检测静态障碍物的目的,同时,将凸多边形作为矢量化元素,以高效紧凑的方式描述局部静态环境,进一步克服传统占用栅格地图存在占用大量内存和增加计算成本的缺点。
附图说明
13.图1为本发明中局部静态环境矢量化描述的流程图。
14.图2为本发明中展示概率栅格地图的平移示意图。
15.图3为本发明中展示典型案例的静态障碍物检测结果图,其中,(a)为原始激光点云图,(b)为占据栅格地图,(c)为静态障碍物检出结果图。
16.图4为本发明中展示上下坡场景下局部静态环境的矢量化描述结果图,其中,(a)为上坡环境,(b)为下坡环境。
具体实施方式
17.以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
18.一种用于地面无人车的局部静态环境矢量化描述方法,针对当前无人车领域通用障碍物检测的相关工作较少,且大都集中于栅格地图的描述方法,本发明则为地面无人车的深度应用提供性能可靠和极易开展的解决方案。
19.本发明一种用于地面无人车的局部静态环境矢量化描述方法,整体实施流程可如图1所示,包括如下步骤:(1)利用地面分割处理由多线激光传感器得到的激光点云信息,得到当前激光扫描帧中每个激光点所对应的属性以及离地高度;具体包括以下子步骤:(1.1)将所有激光点云按照给定角度分辨率α和距离分辨率β,投影到扇形栅格地图;扇形栅格地图可将地面无人车周围自由空间切分为数量一定的栅格,基于此,地面分割过程可以独立于数量庞大的点云,以进一步提高地面提取效率;另一方面,通过同一栅格内多个点云的信息融合,使得地面提取更加鲁棒。
20.(1.2)确定每个扇形栅格内值最小的激光点,并利用区域生长方法完成地面提取,得面到地表达式;考虑到地面点高度最小的先验属性,对于落入同一栅格内的多个激光点,通过只保留z值最小的激光点完成信息融合以实现鲁棒的地面提取;之后对于指定方向的连续栅格,利用基于区域生长的直线提取方法完成地面提取,表达式为,其中h、r分别为地面高度和激光点距离,k、b则为表达式参数;(1.3)通过计算所有激光点与所在区域地面表达式之间的高度差,赋予是否为地面的属性,并得到对应激光点的离地高度;代入激光点坐标信息至所在地面表达式,可计算得到对应激光点的离地高度;同时给定离地高度阈值δh,若当前激光点离地高度小于δh,则赋予激光点地面属性,反之则为非地面属性,同时保留对应激光点的离地高度信息;(2)根据步骤(1)得到的每个激光点所对应的属性以及离地高度,进行障碍物点云提取,并将三维障碍物点云转换为二维障碍物点云;具体包括以下子步骤:(2.1)首先根据地面分割得到的点云和离地高度,去除地面点和高空点得到有效的三维障碍物点云;
(iterative end point fit)算法平滑障碍物轮廓边缘;(5.2)对每个障碍物轮廓进行凹多边形判别;对于凹多边形判别可用采取如下策略:对于障碍物轮廓上顺时针排列的,凹多边形判别式为,若则多边形判定为凹多边形,需要进一步进行分割;(5.3)若为凹多边形,则对该障碍物轮廓进一步分割,利用计算机图形学向量方法将当前凹多边形分割为多个凸多边形。
27.本实施例的方法首先基于激光点云信息和imu信息通过位姿插值获得高频位姿信息;然后利用地面分割获得激光点云和离地高度,并进一步生成二维障碍物点云;最后,结合概率栅格地图和凸多边形完成对局部静态环境的矢量化描述。图3展示了本发明在典型的深度学习失败案例中的障碍物检测效果;图4展示了本发明局部静态环境的矢量化描述效果。
28.以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1